363
9 Kurven
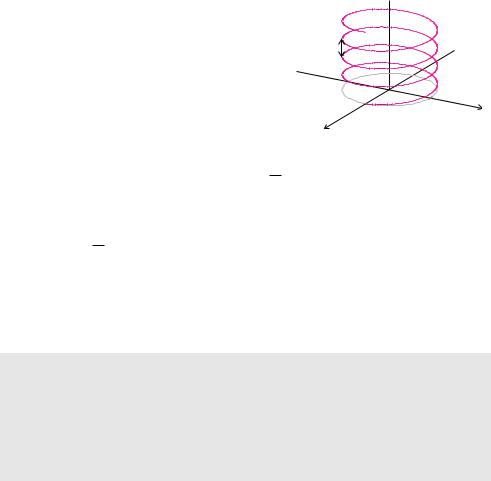
Die Steuerung von Industrierobotern ist ein typisches Anwendungsbeispiel für Kurven. Ein anderes Beispiel sind Spiralkurven, mit denen Daten auf CDs geschrieben oder von CDs gelesen werden. Bahnkurven von Satelliten werden ebenfalls durch Kurven beschrieben. Ganz allgemein erzeugen eindimensional bewegte Objekte eine Bahnkurve. Der Begri „eindimensional“ bedeutet dabei, dass sich das Objekt auf einer gekrümmten Kurve nur in eine Richtung bewegt. Bereits vor einigen Jahrhunderten beschäftigten sich Mathematiker mit der Beschreibung der Bahnkurven von Himmelskörpern. Nach Angaben von Daniel Kehlmann hat sich Carl Friedrich Gauß selbst in seiner Hochzeitsnacht mit solchen Fragen beschäftigt.
In diesem Kapitel betrachten wir unterschiedliche Darstellungsformen von ebenen Kurven und Raumkurven. Wir werden mit Mitteln der Di erenzialund Integralrechnung Formeln zur Berechnung von Tangenten, Krümmungen und Bogenlängen von Kurven angeben. Die elementaren ebenen Kurven wie Kreise, Ellipsen und Hyperbeln betrachten wir ausführlich.
9.1 Parameterdarstellung
Das Schaubild einer Funktion stellt eine ebene Kurve dar. Solche Kurven nennt man Kurven in expliziter Form. Der Begri Kurve ist jedoch viel allgemeiner gefasst. In Abschnitt 5.1.4 haben wir bereits gesehen, dass ein Vollkreis nicht als Schaubild einer Funktion dargestellt werden kann. Der Vollkreis kann jedoch durch eine implizite Gleichung dargestellt werden. Man spricht dann von einer Kurve in impliziter Form. Doch selbst manche einfache Kurve, wie beispielsweise eine Spirale, lässt sich weder als Kurve in expliziter Form noch als Kurve in impliziter Form vernünftig darstellen. Zur mathematischen Beschreibung von Kurven verwendet man deshalb die sogenannte Parameterdarstellung. Kurven bezeichnen wir, genau wie Vektoren, mit fettgedruckten Kleinbuchstaben. Die Koordinaten beziehen sich auf ein kartesisches Koordinatensystem, siehe Definition 3.17.
Definition 9.1 (Parameterdarstellung einer Kurve)
Bei der Parameterdarstellung einer Kurve hängen die Koordinaten der Kurvenpunkte als Funktionen von einem reellen Parameter t ab:
|
|
|
|
|
|
|
x t |
|
|
|
|
c t |
y t |
) |
, |
t I, |
c t |
’ |
y |
(t) |
“ |
, |
t I. |
( ) = Π|
x t |
‘ |
|
( ) = – |
|
( ) — |
|
|
|||
( |
|
|
|||||||||
|
( ) |
|
|
|
” |
|
( ) • |
|
|
||
Ebene Kurven haben zwei Koordinatenfunktionen x(t) und y(t). Raumkurven werden durch drei Koordinatenfunktionen x(t), y(t) und z(t) beschrieben.

364 |
9 Kurven |
Eine Kurve ist erst durch Angabe der Koordinatenfunktionen und des Parameterintervalls festgelegt. Der Parameter durchläuft das komplette Intervall und erzeugt so die Punkte der Kurve. Jede einzelne Koordinatenfunktion muss auf dem kompletten Parameterintervall definiert sein. In der Regel fordert man, dass alle Koordinatenfunktionen stetig sind. Dadurch entstehen lückenlose Kurven. Die Welt der Parameterwerte und die Welt der Koordinaten ist vollkommen getrennt. Man kann sich vorstellen, dass sich die Parameterwerte auf einer Art Zeitskala bewegen und zu jedem Zeitpunkt einen Kurvenpunkt erzeugen.
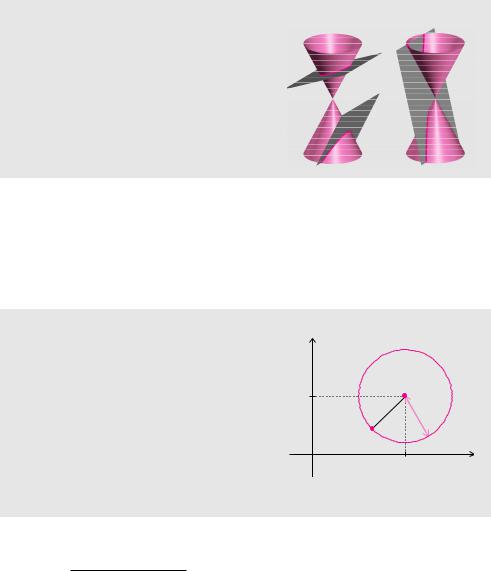
Beispiel 9.1 (Einheitskreis) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
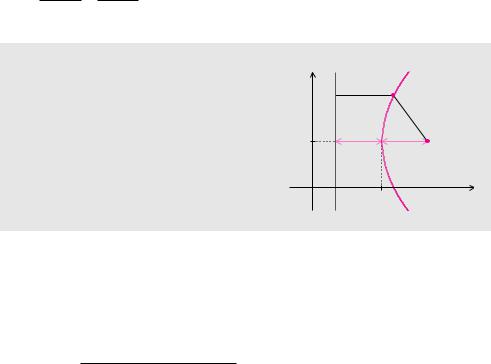
a) |
Durch die Parameterdarstellung |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
|
|
|
t = |
1 |
π |
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||
|
c(t) = Π|
cos t |
|
‘ , |
|
t 0, |
3 |
π |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
2 |
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
sin t |
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
t = π |
|
|
|
|
|
|
|
|
|
|
|
|
t = 0 |
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
1 |
|
x |
|
|||||||||||||||||||||||||||||||
|
wird eine ebene Kurve dargestellt. Die Kurve |
|
|
|
|
|
|
|
|
− |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||
|
startet |
für |
t |
|
0 im |
|
|
Punkt |
|
mit |
|
den Koordina- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t = |
3 |
π |
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
−1 |
|
|
|
2 |
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||
|
ten |
|
1 0 |
|
und endet für t |
|
|
3 |
π im Punkt mit |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
= |
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
Koordinaten |
|
|
|
|
|
1 . Alle Punkte liegen auf |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
|
den ( |
S |
) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
dem Einheitskreis, denn |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
23 π 2 π |
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
( S − ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
π |
|
|
|
|
|
|
t |
|
|||||||||||||||||||||
|
x |
|
t |
2 |
|
y |
|
t |
2 |
|
|
|
cos2 t sin2 t |
|
|
|
1. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
Die implizite( ) + (Gleichung) = |
|
x+2 |
|
|
y2 |
=1 reicht nicht aus, um den Dreiviertelkreis genau festzule- |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
gen. Man benötigt eine mathematische Beschreibung, aus der hervorgeht, dass nur ein Teil |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+ |
|
|
|
|
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
des Vollkreises gemeint ist. Den Dreiviertelkreis kann man nicht als Schaubild einer einzi- |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
gen Funktion darstellen. Bei einer Funktion darf jeder y-Wert höchstens zu einem x-Wert |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
gehören. Man kann sich dadurch behelfen, dass man den oberen und den unteren Halbkreis |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
jeweils getrennt durch eine Funktion beschreibt: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
√ |
|
|
|
|
|
|
, x |
|
|
|
|
|
|
1, 1 |
|
|
|
|
|
|
|
|
√ |
|
|
|
|
, x |
|
|
|
1, 0 . |
|
|
|
|
|
|
|
||||||||||||||||||||||
|
f1 |
|
x |
|
|
|
1 |
|
|
x2 |
|
|
|
|
|
|
|
, |
|
|
|
f2 |
|
x |
1 |
|
x2 |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
b) |
|
|
( |
|
) = + |
|
|
− |
|
|
|
|
|
|
|
|
|
|
[− |
|
|
|
] |
|
|
|
|
|
( ) = − |
− |
|
|
|
|
|
[−y |
|
|
] |
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
Alternativ kann man für den Dreiviertelkreis die |
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
t = 2 π |
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||
|
Parameterdarstellung |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t = 23 π |
|
|
|
|
|
|
|
|
|
|
|
|
t = 25 π |
|
|
|
|
|||||||||||||||||||||||||
|
c(t) = Π|
sin t |
|
‘ , |
|
t π, |
π |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
|
cos t |
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
−1 |
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
x |
|
|
|||||||||||||||||||||||||||||
|
wählen. Die Kurve startet für t |
|
π im Punkt mit |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t = π |
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
−1 |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||
|
den Koordinaten |
|
|
0 |
|
|
|
|
1 und endet für t |
|
|
5 |
π |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
im Punkt mit den Koordinaten |
|
1 0 . Dadurch |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
( |
|
|
S − |
|
|
) |
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
ändern sich der Durchlaufsinn und der Anfangs- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
25 π t |
|
||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
( S ) |
|
|
|
|
|
0 |
|
|
|
|
|
|
|
π |
|
|
|
|
|
|
|
|
|
2 π |
|
||||||||||||
|
und Endpunkt. Nach wie vor wird jedoch dersel- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||
|
be Ausschnitt des Einheitskreises dargestellt. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||
c) |
Der Einheitskreis lässt sich auch durch die Parameterdarstellung |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||
|
c(t) = |
1 |
Œ 1−2tt2 ‘ , |
|
|
|
|
t R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
1 t2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
mithilfe rationaler Funktionen repräsentieren. Die Koordinatenfunktionen erfüllen die Kreis- |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
+ |
|
|
|
|
|
|
|
|
− |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
gleichung für alle Parameterwerte t: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
|
x t |
2 |
|
y |
|
t |
2 |
|
|
|
|
|
|
|
4t2 |
|
|
|
|
|
|
|
1 t2 2 |
|
4t2 1 2t2 t4 |
1 2t2 t4 |
|
1 t2 2 |
|
1. |
|
|||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
t2 2 |
|
|
|
|
(1 |
|
|
|
t2 2 |
|
|
|
|
+1 |
t2 2 |
|
|
|
|
|
1 t2 2 |
|
|
|
|
|
t2 2 |
|
|
|
|
|||||||||||||||||
|
|
( ) + ( ) = |
( |
+ ) |
|
|
+ |
− ) |
= |
|
|
|
− + |
= |
+ + |
|
|
|
|
= |
(1 + ) |
= |
|
|
Ì |
|||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
( |
|
+ ) |
|
|
|
( + ) |
|
|
|
( + ) |
|
|
|
( + ) |
|
|
||||||||||||||||||||||||||||||||||||||||||||||
9.1 Parameterdarstellung |
365 |
Parameterdarstellung
Unterschiedliche Parameterdarstellungen können ein und dieselbe Kurve erzeugen. Eine Kurve besitzt keine eindeutige Parameterdarstellung.
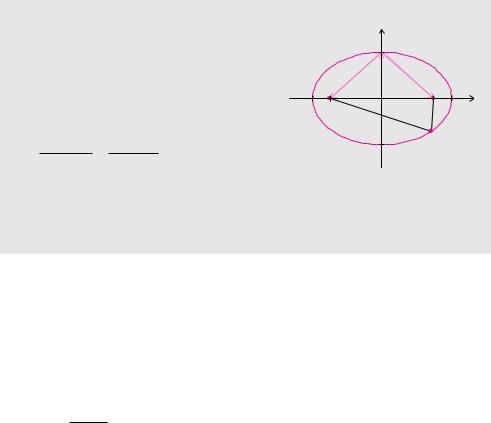
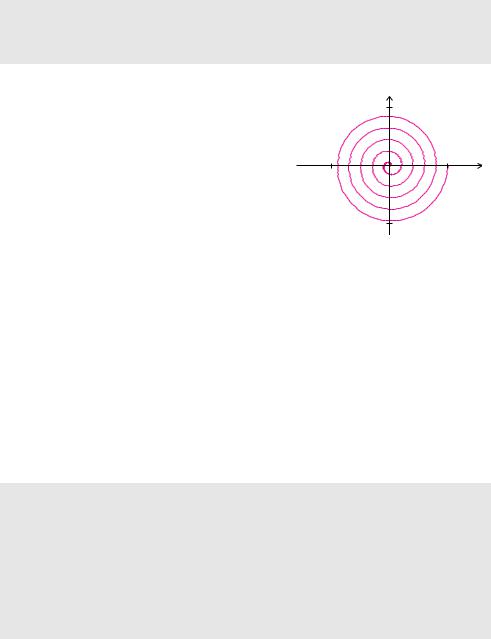
Beispiel 9.2 (Archimedische Spirale) |
|
Bei der nach dem griechischen Mathematiker Archi- |
y |
medes benannten Spirale verändert sich der Radius |
2 nπ |
|
|
proportional zum Winkel. Dadurch haben die einzel- |
|
nen Windungen immer denselben Abstand zueinan- |
|
der. Die Kurve wird durch die Parameterdarstellung |
|
−2 nπ |
2 nπ x |
cos t |
|
c(t) = t Œ sin t ‘ , t [0, 2 n π] , |
|
beschrieben. Jedes Mal, wenn der Parameter t ein |
−2 nπ |
Intervall der Länge 2π durchläuft, bewirken cos t |
|
und sin t eine volle Umdrehung. Dabei wird der Vorfaktor t um den Wert 2π vergrößert. Mithilfe der Tangente, siehe Abschnitt 9.3, kann man zeigen, dass die Spirale den Ursprung in Richtung der positiven x-Achse verlässt. Ì
Archimedische Spiralen finden in Verdichtern ihre Anwendung. In zwei gegenläufigen Spiralen wird durch Rotation das eingeschlossene Volumen verkleinert und so der Druck erhöht. Dieses Prinzip wird etwa in Turboladern, Kompressoren und Wärmepumpen eingesetzt.
Die Kurve aus Beispiel 9.2 ist typisch für Kurven in sogenannten Polarkoordinaten. Eine ebene Kurve definiert man in Polarkoordinaten dadurch, dass man jedem Kurvenpunkt einen Rotationswinkel ϕ und einen entsprechenden Radius r zuordnet. Polarkoordinaten sind insbesondere im Zusammenhang mit komplexen Zahlen von Bedeutung, siehe Definition 11.5.
Definition 9.2 (Ebene Kurve in Polarkoordinaten)
In der Darstellung einer ebenen Kurve
c |
t |
|
r |
t |
|
cos ϕ t |
|
, |
t |
|
I |
|
) = |
) Π|
sin ϕ |
(t) |
‘ |
|
|||||||
|
( |
|
( |
|
( ) |
|
|
|
||||
bezeichnet man ϕ(t) und r(t) als Polarkoordinaten. Dabei ist ϕ eine Funktion, die jedem Parameterwert t aus dem Intervall I einen Winkel ϕ(t) zuordnet, und r(t) eine Funktion, die jedem t aus I einen nicht negativen Radius r(t) zuordnet.
Die Darstellung einer Kurve in Definition 9.2 basiert auf einem kartesischen Koordinatensystem, siehe Definition 3.17. Man kann jedoch die Polarkoordinaten auch direkt in einem Polarkoordinatensystem einsetzen. Dann sind ϕ(t) und r(t) die beiden Koordinatenfunktionen.