15.2 Eigenschaften |
575 |
Darstellung mit Amplitude und Phase
Die Fourier-Transformierte einer reellen Funktion s ist in der Regel eine komplexwertige Funktion S, die von der reellen Variablen f abhängt. Man kann S in Exponentialform
S(f) = SS(f)S ei φ(f)
darstellen. Dabei ist
»
Ldie Amplitude SS(f)S = R(f)2 + I(f)2 eine gerade reelle Funktion und
Ldie Phase φ(f) = arg(S(f)) = arg(R(f) + i I(f)) eine ungerade reelle Funktion.
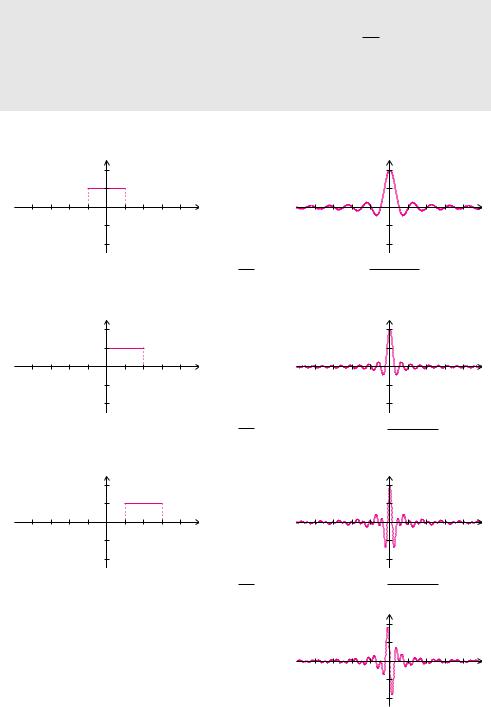
Beispiel 15.6 (Darstellung mit Amplitude und Phase)
Aus der Fourier-Transformierten |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
S(f) = 1 |
1 |
|
|
|
|
|
|
|
− |
2 π f |
|
|
|
|
|
|
|
| |
S(f) |
| |
|
||||||||
4π2f2 + i |
1 |
4π2f2 |
|
|
|
|
1 |
|
|
|
|||||||||||||||||||
der Funktion |
s t+ |
|
e |
− |
t |
σ t |
|
|
|
+ |
|
|
|
|
|
3 |
2 |
1 |
1 |
|
2 |
3 |
t |
||||||
|
( ) = |
|
|
|
( ) |
aus Beispiel 15.3 erhal- |
− |
− |
− |
|
|
|
|
||||||||||||||||
ten wir die |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
Amplitude |
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
||||||
S f |
|
|
»1 |
|
4 |
2 |
2 |
|
|
|
|
|
2 |
2 |
|
|
π |
|
|
|
|
|
|||||||
S ( )S = |
|
|
|
|
|
π2 f2 |
= »1 |
|
|
|
|
|
|
2 |
|
φ(f ) |
|
|
|||||||||||
1 |
|
+4 π f |
|
|
+ |
4 π f |
|
|
|
|
|
|
|
|
|
||||||||||||||
und die Phase |
|
|
+ |
|
|
|
|
|
|
|
|
|
|
|
|
−3 |
−2 |
−1 |
1 |
|
2 |
3 |
f |
||||||
φ |
( |
f |
) = − |
arctan |
( |
2 π f |
) |
. |
|
|
|
|
|
|
|
−π2 |
|
|
|
|
Ì |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
15.2 Eigenschaften
Die Fourier-Transformationen einfacher Funktionen sind in Tabellen festgehalten, siehe Anhang A.7. Für viele Funktionen kann man deshalb die Fourier-Transformierte berechnen ohne dabei auf die Integralformel aus Definition 15.1 zurückzugreifen. Dazu kombiniert man die Korrespondenzen aus den Tabellen und die Rechenregeln der Fourier-Transfor- mation.
Die Rechenregeln der Fourier-Transformation haben alle eine ähnliche Struktur. Sie geben Aufschluss darüber, wie sich Veränderungen an der Funktion im Zeitbereich auf die Funktion im Frequenzbereich auswirken oder umgekehrt. Typische Veränderungen, die wir betrachten, sind Addition, Multiplikation, Verschiebung, Ableitung und Integration.
576 |
15 Fourier-Transformation |
15.2.1 Linearität
Die Linearität der Fourier-Transformation beinhaltet zwei Aspekte. Zum einen besagt sie, dass der Addition von Funktionen im Zeitbereich die Addition der entsprechenden FourierTransformierten im Frequenzbereich entspricht. Zum andern entspricht der Multiplikation mit einem konstanten Faktor im Zeitbereich die Multiplikation mit demselben Faktor im Frequenzbereich.
Satz 15.4 (Linearität)
Die Addition von Funktionen im Zeitbereich entspricht der Addition der zugehörigen Fourier-Transformierten im Frequenzbereich. Die Multiplikation mit einem konstanten Faktor im Zeitbereich entspricht der Multiplikation mit demselben Faktor im Frequenzbereich.
s1(t), s2(t) |
c |
s |
S1(f), S2(f) |
|
|||
|
× |
|
|
|
|
× |
|
C1 s1 t |
× |
|
|
|
C1 S1 f |
× |
|
×C2 s2 t |
|
|
×C2 S2 f |
||||
|
Ö |
|
c |
s |
|
Ö |
|
C |
+und |
C beliebige Konstanten. |
( ) |
||||
Dabei sind( )1 |
2( ) |
|
|
( |
) + |
||
Der Nachweis der Linearität ist o ensichtlich: Die Linearität der Fourier-Transformation geht aus der Linearität des Integrals hervor.
Beispiel 15.7 (Linearität der Fourier-Transformation)
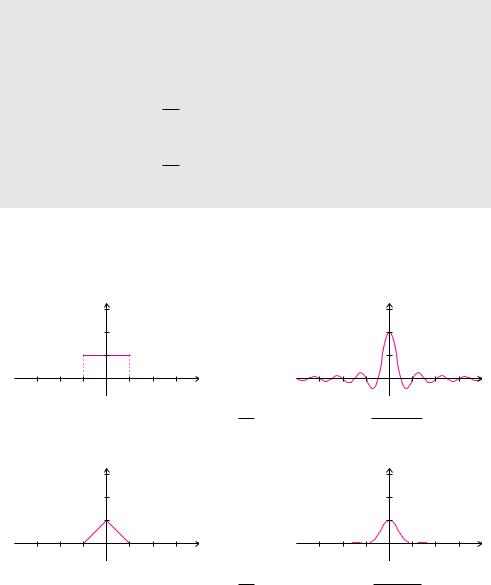
Die Fourier-Transformation der Rechteckfunktion kennen wir bereits aus Beispiel 15.1:
2 |
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
s1(t) |
|
|
|
|
|
|
|
|
|
S1(f) |
|
|
1 |
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
−3 −2 −1 |
|
1 |
2 |
3 |
t |
|
−3 −2 −1 |
|
1 |
2 |
3 |
f |
|||
|
( |
) |
|
|
c |
s |
|
( |
|
) = |
sin |
2 π f |
) |
|
|
s1 |
|
|
S1 |
f |
( |
|
|
|
|||||||
t |
|
|
|
|
|
|
|
π f |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Die Fourier-Transformation der Dreieckfunktion kann man Beispiel 15.4 entnehmen:
|
2 |
s2(t) |
|
|
|
|
2 |
|
S2(f) |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
1 |
|
|
|
|
|
1 |
|
|
|
|
−3 −2 −1 |
1 |
2 |
3 |
t |
c s |
−3 −2 −1 |
|
1 |
2 |
3 |
f |
|
s2(t) |
|
|
|
S2(f) = |
sin2 |
π f |
) |
|
|
|
|
|
|
|
π2(f2 |
|
|
|||||

15.2 |
Eigenschaften |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
577 |
||
Wir können die Fourier-Transformierte von s1(t) + s2(t) mittels Linearkombination berechnen: |
|||||||||||||||||||||
|
|
2 |
|
|
|
|
|
|
|
|
|
|
2 |
|
˜ |
|
|
|
|||
|
|
|
|
s˜(t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
S(f) |
|
||||
|
|
1 |
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
||
|
−3 −2 −1 |
1 |
2 |
3 |
t |
|
|
|
−3 −2 −1 |
|
1 |
|
2 |
3 |
f |
||||||
|
s˜ t |
|
s1 t |
s2 t |
|
c |
s |
˜ |
|
|
|
sin 2 π f |
) |
sin2 |
|
π f |
) |
|
|||
|
|
|
S f |
|
|
π f |
π2 f2 |
|
|||||||||||||
|
|
|
|
|
|
|
( |
|
|
|
( |
|
|
( |
|
|
|
||||
|
sich auch die Fourier-Transformierte von s1 |
t |
|
s2 |
t |
ermitteln: |
|
|
|
|
|
|
|||||||||
Ebenso lässt ( ) = |
( ) + |
( ) |
|
|
|
|
|
) = |
|
|
|
+ |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
( ) − |
( ) |
|
|
|
|
|
|
|
|
|
|||
|
|
2 |
|
|
|
|
|
|
|
|
|
|
2 |
|
ˆ |
|
|
|
|||
|
|
|
|
sˆ(t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
S(f) |
|
||||
|
|
1 |
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
||
|
−3 −2 −1 |
1 |
2 |
3 |
t |
|
|
|
−3 −2 −1 |
|
1 |
|
2 |
3 |
f |
||||||
|
sˆ t |
|
s1 t |
s2 t |
|
c s |
ˆ |
|
|
|
sin 2 π f |
|
sin2 |
|
π f |
|
|
||||
|
|
|
S f |
|
|
π f |
|
2 |
|
2 |
|
|
|||||||||
|
( ) = ( ) − ( ) |
|
|
( ) = |
|
( |
|
) − |
π (f |
|
) |
Ì |
|||||||||
15.2.2 Zeitverschiebung
Als nächstes klären wir die Frage, wie sich eine Verschiebung im Zeitbereich auf die Fourier-Transformation auswirkt. Dazu betrachten wir die um t0 verschobene Funktion
s˜(t) = s(t − t0).
Es sei nochmals darauf hingewiesen, dass t0 |
|
0 eine |
Verschiebung in Richtung der |
|
positiven Zeitachse bewirkt. Entsprechend verschiebt t |
0 |
0 in Richtung der negativen |
||
|
> |
|
|
|
Zeitachse. Die Transformation von s˜ kann man mit der Integralformel aus Definition 15.1 |
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
|
|
|
|
= |
< |
|
|
|
|
|
|
|
|
|
berechnen. Mithilfe der Substitution u |
t |
t0 und du |
dt ergibt sich |
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
˜ |
|
|
|
|
∞ s |
|
|
|
|
− i 2 π f t |
|
|
∞ s |
|
|
|
|
|
i 2 π f u t0 |
|
|
|||
s˜ t |
|
|
|
|
S |
|
f |
|
|
|
t |
|
t0 |
|
e |
dt |
|
|
|
u |
|
e |
|
|
|
du. |
|
||
) |
c s |
( |
) = |
|
( |
− |
) |
= |
|
( |
) |
− |
|
( + ) |
i 2 π f t0 |
||||||||||||||
( |
|
|
S |
−∞ |
|
|
− |
|
S |
−∞ |
|
|
|
|
|||||||||||||||
An den Grenzen |
verändert die Verschiebung um t0 |
nichts. Da der Faktor e− |
|
||||||||||||||||||||||||||
nicht von der Integrationsvariablen u abhängt, können wir diesen Faktor vor das Integral |
|||||||||||
ziehen: |
|
|
|
|
|
±∞ |
|
∞ s u e |
|
|
|
S˜ |
( |
f |
) = |
e |
− |
i 2 π f t0 |
|
− |
i 2 π f udu . |
||
|
|
|
|
S |
−∞ |
( ) |
|
||||
|
|
|
|
|
|
|
|
S f |
|
||
|
|
|
|
|
|
|
´¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¸¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¶ |
||||
|
|
|
|
|
|
|
|
|
( |
|
) |
Wir erkennen, dass es sich bei dem verbleibenden Integral gerade um die Fourier-Trans- formation der Ausgangsfunktion s(t) handelt.