


112 |
3 Vektoren |
3.6 Aufgaben
Verständnisaufgaben
Aufgabe 3.1
Die drei abgebildeten Vektoren a, b und c liegen in einer Ebene. Skizzieren Sie den Vektor
d = a + 2 b − c
und bestimmen Sie mithilfe einer Skizze die Faktoren λ und µ so, dass gilt a = λb + µc.
c
b
a
Aufgabe 3.2
Welche z-Koordinate hat ein Vektor mit x-Koordinate 2, y-Koordinate −3 und Länge 7?
Aufgabe 3.3
Wie lässt sich der Ausdruck (a b)2 + (a × b)2 für zwei beliebige Vektoren a und b vereinfachen?
Aufgabe 3.4
Was folgt für die Vektoren a und b aus den folgenden Aussagen?
a) a × b = 0 und a b = 0 b) Sa × bS = a b |
c) (a b)2 = a2 b2 |
Aufgabe 3.5
Die Vektoren a1, a2 und a3 spannen einen Spat mit Volumen V auf. Welches Volumen hat der Spat, der von den Vektoren b1 = −2 a1 + a2 + a3, b2 = a1 − 2 a2 + a3 und b3 = a1 + a2 − 2 a3 aufgespannt wird?
Aufgabe 3.6
Die Ebene E1 ist in Parameterform gegeben durch
E1 x = x0 + λ x1 + µ x2, λ, µ R.
Die Ebene E2 geht durch den Punkt P und hat den Normalenvektor n. Welche Bedingungen müssen die Vektoren x0, x1, x2, n und der Punkt P erfüllen, damit die beiden Ebenen
a) parallel sind, |
b) identisch sind, |
c) senkrecht zueinander sind? |
Aufgabe 3.7
Beweisen Sie den Satz von Thales mithilfe der Vektorrechnung: Jeder Winkel AP B auf einem Halbkreisbogen ist ein rechter Winkel.
Hinweis: Drücken Sie die Vektoren a und b durch die Vektoren r und s aus und verwenden Sie die Beziehung SsS = SrS, siehe Abbildung. Was gilt für das Skalarprodukt aus a und b?
a
−r
A 
s
r
P
b
 B
B
3.6 Aufgaben |
113 |
Rechenaufgaben
Aufgabe 3.8
Gegeben sind die Vektoren
a = Π|
2 |
‘ , |
b = Π|
5 |
‘ , |
c = Π|
3 |
‘ . |
3 |
4 |
−1 |
a)Welche Länge haben die Vektoren?
b)Berechnen Sie die Winkel zwischen den Vektoren.
c)Welche Winkel schließen die Vektoren mit den Koordinatenachsen ein?
d) Bestimmen Sie die Einheitsvektoren, die senkrecht auf dem Vektor a − b + 3 c stehen.
e) Kontrollieren Sie alle Berechnungen zeichnerisch.
Aufgabe 3.9
Ein Spat wird von drei Vektoren a, b und c mit den Längen SaS = 3, SbS = 5 und ScS = 2 aufgespannt. Die Winkel zwischen den Vektoren betragen (a, b) = 120○, (b, c) = 60○ und (c, a) = 120○.
a)Berechnen Sie die Längen der Diagonalen des von a und b aufgespannten Parallelogramms.
b)Wie lang ist die Raumdiagonale d = a + b + c des Spats?
c)Welche Winkel schließt die Raumdiagonale d mit den Vektoren a, b und c ein?
d)Bestimmen Sie die Projektionen von d auf die drei Vektoren a, b und c.
Aufgabe 3.10
Gegeben sind drei Vektoren a, b und c. Der Faktor λ soll so bestimmt werden, dass die Summe a + λ b auf dem Vektor c senkrecht steht. Gehen Sie dazu folgendermaßen vor:
a) Bestimmen Sie λ für die Vektoren
a |
’ |
6 |
“ |
, |
b |
’ |
0 |
“ |
, |
c |
|
2 |
“ . |
1 |
3 |
’ −3 |
|||||||||||
|
= – |
1 |
— |
|
|
= – |
1 |
— |
|
|
= – |
5 |
— |
|
” |
|
• |
|
|
” − |
|
• |
|
|
” |
|
• |
b)Leiten Sie eine möglichst einfache Formel her, mit der man den Faktor λ aus den beiden Skalarprodukten a c und b c berechnen kann, und überprüfen Sie die Formel mit dem Ergebnis aus Aufgabenteil a). Wann ist das Problem nicht lösbar?
Aufgabe 3.11
Wir betrachten einen Würfel mit Seitenlänge a.
a)In jeder Würfelecke schneiden sich zwei Flächendiagonalen zweier aneinandergrenzender Würfelflächen. Welchen Winkel schließen die beiden Flächendiagonalen ein?
b)Alle Raumdiagonalen des Würfels schneiden sich in einem einzigen Punkt. Berechnen Sie den Winkel, unter dem sich die Raumdiagonalen schneiden.

114 3 Vektoren
Aufgabe 3.12
Gegeben sind die beiden Vektoren
a |
2 |
“ |
, |
b |
|
5 |
“ . |
’ −1 |
’ −3 |
||||||
|
= – −2 |
— |
|
|
= – |
4 |
— |
|
” |
• |
|
|
” |
|
• |
a)Bestimmen Sie den Einheitsvektor in Richtung von b.
b)Berechnen Sie die Projektion von a in Richtung von b und zerlegen Sie damit den Vektor a in Komponenten parallel und normal zu b.
c)Welche Winkel schließen die Vektoren a und b mit den Koordinatenachsen ein?
Aufgabe 3.13
Gegeben sind die drei Punkte A(2 S 0 S − 1), B(0 S 2 S − 1) und C(0 S 0 S 1). Bestimmen Sie die Koordinaten der Mittelpunkte MAB zwischen A und B, MAC zwischen A und C und MBC zwischen B und C. Welchen Flächeninhalt hat das Dreieck, das aus den Punkten MAB, MAC und MBC gebildet wird?
Aufgabe 3.14
Wie groß sind die Oberfläche und das Volumen des von den folgenden drei Vektoren aufgespannten Tetraeders?
a |
’ |
1 |
“ |
, |
b |
’ |
0 |
“ |
, |
c |
’ |
1 |
“ . |
1 |
1 |
0 |
|||||||||||
|
= – |
0 |
— |
|
|
= – |
1 |
— |
|
|
= – |
1 |
— |
|
” |
|
• |
|
|
” |
|
• |
|
|
” |
|
• |
Aufgabe 3.15
Sind die beiden Vektoren a1, a2 bzw. die drei Vektoren b1, b2, b3 linear abhängig?
a1 |
’ |
2 |
“ |
, |
a2 |
|
3 |
“ |
, |
b1 |
’ |
1 |
“ |
, |
b2 |
|
1 |
“ |
, |
b3 |
1 |
“ |
? |
4 |
’ −6 |
2 |
’ −1 |
’ −1 |
|||||||||||||||||||
|
= – −6 |
— |
|
|
= – |
9 |
— |
|
|
= – −3 |
— |
|
|
= – |
2 |
— |
|
|
= – −0 |
— |
|
||
|
” − |
|
• |
|
|
” |
|
• |
|
|
” − |
|
• |
|
|
” |
|
• |
|
|
” |
• |
|
Aufgabe 3.16
Gegeben sind die drei Punkte mit den Koordinaten
P1(−1 S 3 S 7), P2(−5 S 4 S 3), P3(6 S − 5 S − 4).
a)Bestimmen Sie die Gerade g, die durch die beiden Punkte P1 und P2 geht.
b)Welche Koordinaten hat der Mittelpunkt der beiden Punkte P1 und P2?
c)Welchen Abstand hat der Punkt P3 von der Geraden g?
d)Berechnen Sie die Winkel im Dreieck, das durch die drei Punkte gebildet wird.
e)Wie groß ist der Flächeninhalt des Dreiecks durch die drei Punkte?
f)Bestimmen Sie die Ebene E, die durch alle drei Punkte geht.
g)Welche Gerade h geht durch den Schwerpunkt der drei Punkte und steht senkrecht auf E?
3.6 Aufgaben |
115 |
Aufgabe 3.17
Gegeben sind die vier Punkte A(6 S 3 S − 5), B(2 S − 1 S 3), C(1 S 2 S 4) und D(−7 S 4 S − 1). Liegen die Punkte A, B und C auf einer Geraden? Liegen die Punkte A, B, C und D in einer Ebene?
Aufgabe 3.18
Gegeben ist die Gerade g und die Ebene E:
g |
|
x |
’ |
2 |
“ |
λ |
’ |
2 |
“ |
, λ |
|
R, |
E |
|
3x1 |
+ |
4x2 |
− |
2x3 |
= |
4. |
3 |
3 |
||||||||||||||||||||
|
|
= – |
|
— + |
|
– − |
|
— |
|
|
|
|
|
|
|
”−1 • ” 1 •
a)Berechnen Sie den Schnittpunkt S der Geraden mit der Ebene.
b)Unter welchem Winkel schneidet die Gerade die Ebene?
c)Welche Gerade steht senkrecht auf der Ebene und geht durch den Schnittpunkt S?
d)Geben Sie eine Parameterdarstellung der Ebene E an.
Aufgabe 3.19
Die Ebene E geht durch den Punkt P mit den Koordinaten P (0 S 3 S 1) und hat den Normalenvektor
’ 2 “ n = – 3 — .
”1 •
a)Bestimmen Sie eine Gerade g, die senkrecht auf der Ebene E steht und durch den Punkt Q(6 S 5 S 2) geht.
b)Welche Koordinaten hat der Durchstoßpunkt S der Geraden g durch die Ebene E?
c)Welchen Abstand hat der Punkt Q von der Ebene E?
d)In welchen Punkten durchstoßen die Koordinatenachsen die Ebene E?
e)Bestimmen Sie die Schnittgeraden der Ebene E mit der x-y-Ebene, mit der x-z-Ebene und mit der y-z-Ebene.
Aufgabe 3.20
Wir betrachten für λ und µ aus R die beiden Ebenen
E1 |
|
x |
’ |
2 |
“ |
λ |
’ |
2 |
“ |
µ |
’ |
1 |
“ |
, E2 |
|
x |
’ |
1 |
“ |
λ |
’ |
1 |
“ |
µ |
’ |
0 |
“ . |
0 |
3 |
3 |
0 |
1 |
1 |
||||||||||||||||||||||
|
|
= – |
4 |
— + |
|
– |
1 |
— + |
|
– |
2 |
— |
|
|
= – |
2 |
— + |
|
– |
0 |
— + |
|
– −1 |
— |
|||
|
|
|
” • |
” − |
|
• |
|
” |
− |
• |
|
|
|
” • |
” • |
” |
|
• |
|||||||||
a)Zeigen Sie, dass die beiden Ebenen parallel sind.
b)Die Gerade g verläuft senkrecht zu beiden Ebenen durch den Koordinatenursprung.
c)Berechnen Sie die Schnittpunkte der Geraden g mit den beiden Ebenen.
d)Welchen Abstand haben die beiden Ebenen?
116 |
3 Vektoren |
Anwendungsaufgaben
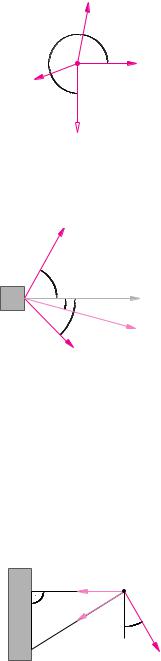
Aufgabe 3.21
An einem Verteilermast greifen vier Kräfte an, die alle in einer Ebene liegen. Die Beträge der Kräfte sind
2 F
S F 1 S |
= |
380 N, |
S F 2 S |
= |
400 N, |
S F 3 S |
= |
300 N, |
S F 4 S |
= |
440 N. |
Die Winkel sind in der Abbildung enthalten. Ermitteln Sie die resultierende Kraft zeichnerisch. Wie lautet das rechnerische Ergebnis?
F3
120◦ 80◦ F 1
70◦
F 4
4
Aufgabe 3.22
Eine Lampe hängt in der Mitte eines über die Straße gespannten Seils. Infolge des Durchhangs bildet das Seil einen Winkel von 20○ mit der Horizontalen. Das Seil darf im Höchstfall mit 1200 N belastet werden. Wie schwer darf die Lampe höchstens sein?
Aufgabe 3.23
Ein schwerer Gegenstand soll mithilfe von Zugkräften an Seilen bewegt werden. Die erste Kraft F 1 wirkt mit 700 N unter einem Winkel von 60○ und die zweite Kraft F 2 wirkt mit 600 N unter einem Winkel von −45○ bezogen auf die Richtung d.
a)In welche Richtung bewegt sich der Gegenstand?
b)Mithilfe einer dritten Kraft F 3 mit einem Betrag von 1000 N soll der Gegenstand in Richtung von d bewegt werden. Unter welchem Winkel α muss die Kraft F 3 dann wirken?
F |
1 |
|
60◦
α
−45◦
F
2
d
F3
Aufgabe 3.24
Ein 100 Meter breiter Fluss hat an jeder Stelle dieselbe Strömungsgeschwindigkeit 0.4 ms . Ein Hund durchschwimmt den Fluss mit der Eigengeschwindigkeit 0.6 ms .
a)Wie weit wird der Hund abgetrieben, wenn er immer senkrecht zur Strömungsrichtung des Flusses schwimmt, und wie lange braucht er dabei für die Überquerung?
b)Unter welchem Winkel muss der Hund schwimmen, wenn er genau gegenüber dem Startpunkt das andere Ufer erreichen will? Wie lange braucht er jetzt für die Überquerung?
Aufgabe 3.25
Ein Ausleger besteht aus zwei Stäben, siehe Abbildung. Der waagrechte Stab hat die Länge s1 = 80 cm, der vertikale Abstand der Stäbe beträgt s = 50 cm. Im Punkt P greift eine Kraft F mit SF S = 20 kN unter dem Winkel α = 30○ gegen die Vertikale an. Welche Zugoder Druckkräfte F1 und F2 wirken in den Stäben?
s1
ss2
F 1
F2
P α
F