


616 |
16 Laplace-Transformation |
und durch Lösen der quadratischen Gleichung
√
s2 − 3 s + 2 = 0 Ô s2,3 = 3 ± 9 − 8 = 1, 2. 2
(2)Bei s1,2 = 1 handelt es sich um eine doppelte Nullstelle, s3 = 2 ist eine einfache Nullstelle. Deshalb verwenden wir den Ansatz
|
|
|
|
A |
2 |
|
|
B |
1 |
|
|
|
C |
|
|
A |
s |
− |
1 |
) |
2 |
+ |
B |
( |
s |
− |
1 s |
|
|
2 |
) + |
C s |
2 |
) |
||
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
( |
|
|
|
|
|
)( − |
|
|
( − |
|
||||||||||||
F |
s |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
|
( |
) = |
|
− |
|
+ |
|
− |
|
+ ( |
s |
− ) |
2 |
= |
|
|
|
|
|
|
|
( − |
)( − |
1 |
) |
2 |
|
|
|
|
|
|||||
|
|
s |
|
|
s |
|
|
|
|
|
|
|
|
|
|
|
|
|
s |
|
2 |
s |
|
|
|
|
|
|
|
|||||||
(3) Durch Ausmultiplizieren des Zählers erhalten wir
s = A s2 − 2 A s + A + B s2 − 3 B s + 2 B + C s − 2 C.
Ein Koe zientenvergleich ergibt das lineare Gleichungssystem
|
A |
+ |
B |
+ |
|
|
= |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
2 A |
3 B |
C |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
−A |
− |
2 B |
2 C |
= |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
mit der |
+ |
|
|
|
− |
|
|
= |
|
|
|
|
|
2, B |
|
2 und |
C 1. Die Korrespondenzen aus Bei- |
|||||||||||||||||||||
|
|
|
eindeutigen Lösung A |
|
|
|||||||||||||||||||||||||||||||||
spiel 16.1 zusammen mit einer |
Zeitverschiebung, siehe Satz 16.3, ergeben die Rücktransfor- |
|||||||||||||||||||||||||||||||||||||
|
|
= |
|
= − |
|
|
|
|
|
= − |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
mation: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F |
s |
= |
|
|
2 |
|
− |
|
2 |
|
|
− |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
( ) |
s |
|
2 |
s |
|
1 |
|
|
s |
2 |
|
|||||||
|
|
|
|
|
|
s |
|
|
|
|
|
s |
|
|
|
|
|
|
|
|
|
|
− |
|
|
|
− |
|
|
|
( |
|
− |
) |
|
|||
1 |
|
|
|
|
|
1 |
, |
t |
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
c s |
|
c s |
|
|
|
|
|
Ô |
f t |
|
2 e2 t |
|
2 et |
|
|
|
|
t et |
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
|
|
|
|
− |
|
|
|
|
− |
|
|
|
|
Ì |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
( ) |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
16.6 Lösung gewöhnlicher Di erenzialgleichungen
Bei praktischen Problemen wird die Laplace-Transformation hauptsächlich zur Lösung von Di erenzialgleichungen eingesetzt. Wir betrachten in diesem Abschnitt lineare Di e- renzialgleichungen mit konstanten Koe zienten, siehe Definition 12.16 und lineare Differenzialgleichungssysteme mit konstanten Koe zienten, siehe Definition 12.30. Für das Verständnis der in diesem Abschnitt präsentierten Methoden ist ein Grundverständnis für Di erenzialgleichungen erforderlich. Die Lösungsmethoden unterscheiden sich jedoch grundsätzlich von den Verfahren aus Kapitel 12.
Die wesentliche Idee besteht darin, die Di erenzialgleichung in den Bildbereich zu transformieren und dort zu lösen. Durch die Transformation einer linearen Di erenzialgleichung oder eines linearen Di erenzialgleichungssystems mit konstanten Koe zienten in den Bildbereich ergibt sich eine algebraische Gleichung. Gelingt es, diese algebraische Gleichung zu lösen, dann kann man die Lösung im Zeitbereich durch Rücktransformation der Lösung im Bildbereich berechnen.
618 |
16 Laplace-Transformation |
Vorteile der Laplace-Transformation
Die Lösung einer linearen Di erenzialgleichung mit der Laplace-Transformation bietet folgende Vorteile:
LAnfangswerte werden bei der Transformation in den Bildbereich berücksichtigt.
LEine separate Betrachtung der homogenen und der inhomogenen Di erenzialgleichung ist nicht erforderlich.
Beispiel 16.14 (Randwertproblem mit Di erenzialgleichung zweiter Ordnung)
Wir betrachten das Randwertproblem |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
x¨ 9 x 0, x |
|
π2 |
1, x π |
1. |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
Zur Transformation+ = |
der‰ |
DiŽ =erenzialgleichung( ) = − |
benötigen wir Anfangswerte zum Zeitpunkt t |
= |
0. |
||||||||||||||||||||||||||
Da wir diese Werte nicht kennen, arbeiten wir mit Parametern: |
|
|
|||||||||||||||||||||||||||||
x 0 |
|
|
C , |
|
|
|
x˙ 0 |
C2. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
Damit ergibt( ) =die1Transformation( ) = |
in den Bildbereich |
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
x¨ |
|
|
|
|
|
+ |
9 x |
= |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
s2 X s C1 C2 |
|
|
9 X |
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
Die Lösung |
der Gleichung im Bildbereich ergibt |
|
|
|
|
|
|
|
|
||||||||||||||||||||||
− |
|
|
|
|
|
|
− |
|
|
+ |
|
|
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
C2 |
C1 s |
|
|
|
||||
s |
|
X + |
9 X |
= C2 + C1 s |
|
Ô X |
= |
|
+ |
|
. |
|
|
|
|
||||||||||||||||
|
|
s2 9 |
s2 9 |
|
|
|
|||||||||||||||||||||||||
Aus der Korrespondenztabelle im Anhang A.8 |
bestimmen wir die Rücktransformation: |
|
|
||||||||||||||||||||||||||||
|
+ |
|
+ |
|
|
|
|
|
|||||||||||||||||||||||
X |
= |
|
|
C2 |
|
|
|
3 |
|
|
|
+ |
C1 |
s |
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
s2 |
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
3 |
|
|
+ |
9 |
|
|
s + 9 |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
x |
= |
C2 |
cos (3 t) |
+ C1 sin (3 t) |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
Somit haben wir die allgemeine Lösung der Di erenzialgleichung |
|
|
|
||||||||||||||||||||||||||||
x(t) = |
|
C2 |
cos (3 t) + C1 sin (3 t) |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
bestimmt. Die Lösung des Randwertproblems ergibt sich aus den Randwerten: |
|
|
|||||||||||||||||||||||||||||
|
|
π |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
C2 |
|
|
|
x ‰ 2 |
Ž = 1 |
|
|
Ô −C1 = 1, |
x(π) = −1 |
Ô − |
|
= −1. |
|
|
|||||||||||||||||||||
|
|
3 |
|
|
|||||||||||||||||||||||||||
Die Lösung des Randwertproblems lautet x(t) = cos (3 t) − sin (3 t). |
|
|
Ì |
||||||||||||||||||||||||||||

16.6 Lösung gewöhnlicher Di erenzialgleichungen |
619 |
Allgemeine Lösung einer Di erenzialgleichung mit Laplace-Transformation
Zur Bestimmung der allgemeinen Lösung einer linearen Di erenzialgleichung mit der Laplace-Transformation kann man für die Anfangswerte zum Zeitpunkt t = 0 Parameter einführen:
x(0) = C1, x˙(0) = C2, x¨(0) = C3, . . .
Dadurch kann man auch Anfangswertprobleme, bei denen die Anfangswerte nicht zum Zeitpunkt t = 0 gegeben sind, und Randwertprobleme lösen.
Beispiel 16.15 (Di erenzialgleichung zweiter Ordnung mit Resonanz)
Zur Lösung des Anfangswertproblems |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
x¨ |
− |
3 x˙ |
+ |
2 x |
= |
et, x |
( |
0 |
) = |
0, x˙ 0 |
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
( ) = |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
transformieren wir die Di erenzialgleichung mit den Anfangswerten in den Bildbereich: |
|
||||||||||||||||||||||||||||||||||||||
|
|
x¨ |
|
|
− |
|
3 x˙ |
+ |
|
2 x |
|
|
= |
|
|
et |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
s2 X − 1 − 3 s X + 2 X = |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
s 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
Die Lösung der Gleichung im |
Bildbereich ergibt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
1 |
|
|
|
− |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
s2 X |
|
|
s X |
|
|
X |
|
|
|
|
|
|
|
|
|
|
|
X |
|
|
|
|
|
|
|
s |
|
|
|
|
|
|
|
||||||
− |
3 |
+ 2 |
= 1 |
+ s |
− |
1 |
|
|
Ô2 t |
|
= |
|
ts |
− |
1 |
)( |
s2 |
− |
3 s |
+ |
2 |
. |
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
t |
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 e |
|
2 e |
|
|
|
|
( , |
|
|
|
|
) |
|
||||||||||
Die Rücktransformation ergibt x t |
) = |
− |
|
− |
t e |
|
siehe Beispiel 16.12. |
Ì |
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
( |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
Bei der Di erenzialgleichung in Beispiel 16.15 liegt Resonanz vor, siehe Abschnitt 12.3.4. Bei der Lösung des Problems mit der Laplace-Transformation wird dieser Aspekt quasi automatisch berücksichtigt.
Laplace-Transformation bei Di erenzialgleichung mit Resonanz
Die Laplace-Transformation kann auch im Resonanzfall zur Lösung einer linearen Differenzialgleichung mit konstanten Koe zienten verwendet werden.
In Beispiel 16.15 taucht bei der Lösung des Problems das charakteristische Polynom, siehe Definition 12.17, auf. Das ist kein Zufall. Transformiert man eine lineare homogene Di erenzialgleichung mit konstanten Koe zienten mit Nullanfangsbedingungen
|
x |
( |
0 |
) = |
0, |
x˙ |
0 |
) = |
0, |
x¨ |
( |
0 |
) = |
0, . . . |
in den |
|
|
|
( |
|
|
|
|
|
|||||
|
Bildbereich |
|
|
|
|
|
|
|
|
|
||||
an x(n) + an−1 x(n−1) + . . . + a2 x¨ + a1 x˙ + a0 x = 0
an sn X + an−1 sn−1 X + . . . + a2 s2 X + a1 s X + a0 X = 0

16.6 Lösung gewöhnlicher Di erenzialgleichungen |
621 |
Insgesamt besteht die Lösung aus zwei Abschnitten: |
|
|
||||||||||||||||||||||||
x t |
¢ |
4 |
1 |
|
cos |
|
2t |
|
|
|
für 0 |
|
t |
|
|
1 |
1 |
|
||||||||
|
|
|
|
|
|
|
|
x(t) |
|
|||||||||||||||||
|
¨ |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
¨ |
1 |
|
− |
|
|
|
( |
|
|
|
)Ž |
|
|
|
|
|
|
≤ |
|
≤ |
|
|
|
|
|
|
¨ |
‰ |
|
|
|
t |
|
|
|
|
|
|
t |
|
|
|
|
t . |
|
|
||||||
|
¨ |
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
( ) = ¦ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
¨ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
¨ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
¨ |
|
cos |
|
2 |
|
|
|
2 |
|
|
cos |
|
2 |
|
|
für 1 |
|
|
|
1 |
t |
||||
|
¨ |
‰ |
( |
|
− |
) − |
( |
|
)Ž |
< |
|
|||||||||||||||
|
¨ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
¨ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ì |
|
¤ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Die Di erenzialgleichung aus Beispiel 16.16 ist mit klassischen Hilfsmitteln nur schwer in den Gri zu bekommen. Für die abschnittsweise definierte Störfunktion, die sogar eine Sprungstelle besitzt, fehlt uns bei der klassischen Lösungstheorie ein geeigneter Ansatz zur Bestimmung einer partikulären Lösung, siehe Abschnitt 12.3.4. Mithilfe der LaplaceTransformation können wir elegant Probleme lösen, die mit den klassischen Methoden aus Kapitel 12 nur schwer zu bewältigen sind.
Lineare Di erenzialgleichungen mit abschnittsweise definierten Störfunktionen
Die Laplace-Transformation kann man auch zur Lösung linearer Di erenzialgleichungen verwenden, bei denen die Störfunktion eine abschnittsweise definierte Funktion ist und sogar Sprungstellen haben darf. Zur Rücktransformation verwendet man dabei in der Regel den Faltungssatz.
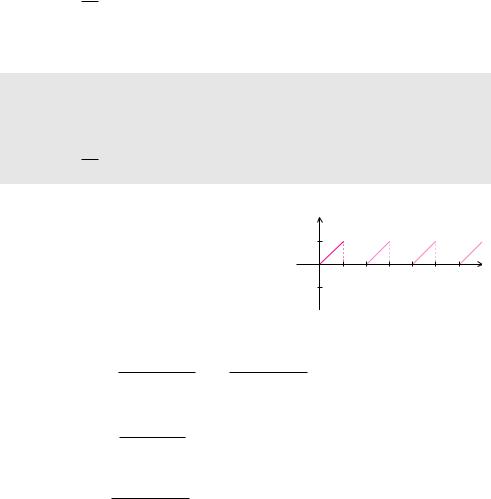
Beispiel 16.17 (Di erenzialgleichungssystem)
Wir betrachten ein Anfangswertproblem, das aus einem linearen Di erenzialgleichungssystem zweiter Ordnung und vier Anfangswerten zum Zeitpunkt t = 0 besteht:
x¨ |
+ |
2 y¨ |
+ |
x˙ |
− |
2 y |
= |
4 σ t , x 0 |
0, |
x˙ 0 |
3 |
||
x¨ |
y˙ |
x |
y |
σ(t), y(0) = |
0, |
y˙ |
(0) = |
1 |
|||||
|
+ |
|
− |
|
+ |
|
= |
( ) |
( ) = |
|
|
( ) = |
|
Die Transformation der Gleichungen in den Bildbereich ergibt:
s2 X |
− |
3 |
+ |
2 s2 |
Y |
− |
1 |
) + |
s X |
2 Y |
= |
4 |
|||
|
|
||||||||||||||
1 |
|||||||||||||||
2 |
|
( |
|
|
|
− |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
s |
|
s X − 3 |
+ |
|
|
s Y − X |
+ |
Y |
= |
|
|
||||||
|
|
|
s |
||||||||||||
Dabei bezeichnen X und Y die Transformationen unserer gesuchten Funktionen x und y. Im Bildbereich erhalten wir das lineare Gleichungssystem mit Parameter s, das sich durch Division
mit dem Faktor |
|
|
1 |
|
vereinfachen lässt: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
s + 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
5 s |
|||||||||||||||||||||||||
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
4 5 s |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
s |
|
+ |
s |
) |
X |
|
+ |
|
2 |
( |
s |
|
− |
1 |
) |
Y |
= |
|
|
|
|
|
|
|
|
s X |
+ |
2 |
( |
s |
− |
1 |
) |
Y |
= |
s s+ |
|
1 |
|||||||
|
|
|
|
|
|
|
s |
|
|
|
|
|||||||||||||||||||||||||||||||||||
( |
2 |
|
|
|
|
|
|
|
|
|
|
|
1 + 3 s |
|
|
|
|
|
|
|
|
|
|
1 3 s |
||||||||||||||||||||||
( |
s |
|
− |
1 |
) |
X |
|
|
|
|
|
|
|
s |
1 |
) |
Y |
= |
|
|
|
|
Ô |
s |
− |
1 |
) |
X |
+ |
|
|
|
|
|
|
Y |
= |
( + |
) |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
s s |
1 |
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
s |
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
+ ( + |
|
|
|
+ |
|
|
( |
|
|
|
|
|
|
|
|
|
|
+ |
|
) |
||||||||||||||||||||
Die Lösung dieses Gleichungssystems lautet |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
( + |
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
6 s |
3 |
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
X |
= |
s |
|
2 s2 |
|
+s |
|
|
1 |
|
|
, Y |
= |
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
− |
) |
2 s2 |
− |
s |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
( |
|
|
|
+ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||