


6.4 Geometrische Bedeutung der Ableitungen |
273 |
Steigung nimmt also auch zu, wenn sie sich von negativen Werten zu positiven Werten verändert. Den Begri der Krümmung kann man mathematisch noch exakter definieren. Im Zusammenhang mit Kurven geschieht dies in Abschnitt 9.4.
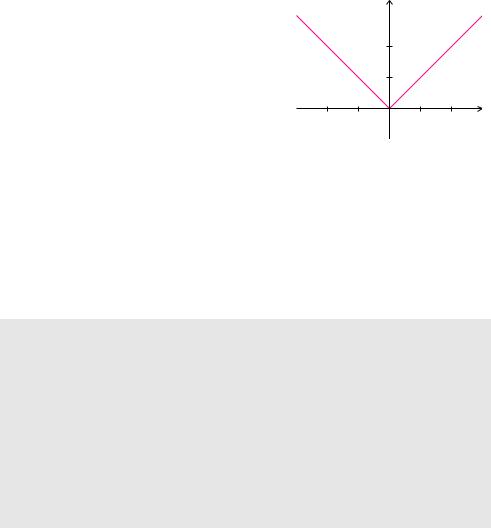
Beispiel 6.23 (Krümmung) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
Das |
Krümmungsverhalten |
der |
|
Exponentialfunktion |
|
|
y |
|
|
|
|
||||||||||||||||||||
f x |
) = |
5 e− |
x2 |
bestimmt |
|
man |
|
anhand |
der |
zweiten |
|
|
5 |
f (x) = 5 e− |
x 2 |
||||||||||||||||
2 |
|
|
|
|
4 |
2 |
|||||||||||||||||||||||||
( |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ableitung |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
′ |
|
|
|
5 x e |
− |
x2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|||
|
|
f |
|
x |
|
2 |
5 x2 e |
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|||||||||||
|
|
f |
|
|
(x) = −5 e |
|
|
2 |
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
′′ |
( |
) |
= |
− |
− |
x2 |
+ |
|
|
|
|
|
− |
x2 |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
1 |
|
− |
x2 |
|
|
x2 |
|
|
|
|
1 |
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
= |
5 x2 |
|
|
e |
|
|
|
e |
|
|
2 . |
|
3 |
2 |
1 |
2 |
3 |
x |
||||||
|
|
|
|
|
|
|
5(x |
|
−1 |
|
)x |
+ |
1 |
) |
− |
|
1 |
||||||||||||||
|
|
|
|
|
|
|
= |
( |
− |
|
)( |
|
|
|
|
|
|
− |
− |
− |
|
|
|
|
|||||||
An den Stellen x |
|
1 wechselt das Krümmungsverhalten. Die Funktion ist für |
1 |
x 1 |
||||
rechtsgekrümmt |
und für x |
|
1 oder für x 1 linksgekrümmt. |
− < |
< |
|
||
|
= ± |
|
< − |
> |
Ì |
|||
|
|
|
|
|
|
|||
6.4.4 Lokale Extrema
Technische Systeme verfügen meistens über eine Vielzahl von Stellgrößen. Mithilfe mathematischer Modelle versucht man, für diese Stellgrößen Werte zu ermitteln, die zu einem optimalen Ergebnis führen. Beispielsweise versucht man Verbrennungsprozesse so zu steuern, dass möglichst wenig Schadsto e erzeugt werden. Optimierungsprobleme spielen auch in anderen Bereichen eine wichtige Rolle. In der Betriebswirtschaft geht man etwa der Frage nach, bei welcher Anzahl produzierter Teile man einen maximalen Gewinn erzielen kann. Solche Fragestellungen führen zu dem mathematischen Problem, Stellen zu bestimmen, an denen Funktionen ihren minimalen oder maximalen Wert annehmen.
Definition 6.10 (Lokales Minimum und Maximum)
Eine Funktion f besitzt an der Stelle x0
Lein lokales Minimum, wenn alle anderen Funktionswerte in der Umgebung von x0 größer sind als der Funktionswert an der Stelle x0:
f(x0) < f(x), x ≠ x0.
Einen entsprechenden Punkt im Schaubild bezeichnet man als Tiefpunkt.
Lein lokales Maximum, wenn alle anderen Funktionswerte in der Umgebung von x0 kleiner sind als der Funktionswert an der Stelle x0:
f(x0) > f(x), x ≠ x0.
Einen entsprechenden Punkt im Schaubild bezeichnet man als Hochpunkt.

6.4 Geometrische Bedeutung der Ableitungen |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
275 |
|||||||||||||||||||||||||||||||||||||
Beispiel 6.25 (Minimum) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
Die Extremwerte der Funktion |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
f x 2 √x2 4 x 8 6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
bestimmen( )wir= |
aus den− |
|
Nullstellen+ − |
der ersten Ablei- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||
tung |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
−1 |
|
|
|
|
1 |
2 |
|
|
|
3 |
|
4 |
5 |
x |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
2 2 x |
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
−1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
f′ |
( ) = |
|
√ |
( |
|
− |
|
|
) |
|
|
= |
2 |
√ |
|
|
|
|
|
− |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
−2 |
|
|
f (x) =2√x2 |
|
4x + 8 6 |
||||||||||||||||||||||||||||||
|
x |
|
|
|
2 x2 4 x 8 |
|
|
|
x2 4 x 8 . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
Der einzig mögliche |
Kandidat für einen Extremwert |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
− |
|
|
|
|
|
|
− |
||||||||||||||||||||||||||||||||||||||
|
− |
|
|
|
|
+ |
|
|
|
|
|
|
|
|
− |
|
|
|
|
|
+ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
ist somit x 2. Bei der ersten Ableitung wechselt an |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||
der Stelle x= |
2 das Vorzeichen von minus nach plus. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||
Also besitzt=die Funktion f an der Stelle x |
|
2 ein lokales Minimum. Der Tiefpunkt hat die |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Koordinaten |
|
2 |
|
|
2 |
. Wir können auch mit |
|
der zweiten Ableitung |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
( |
|
S − |
|
) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
|
|
|
2 |
|
|
2 x |
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
√x2 4 x |
|
8 |
|
|
|
|
|
|
|
|
|
|
|
|
|
x2 |
|
|
|
4 x 8 x 2 2 |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||
f |
|
|
x |
|
|
|
|
|
2 |
|
|
|
2 x2 |
|
4 x 8 |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
( |
|
|
− |
|
|
|
)( − |
|
|
) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
− |
|
|
+ |
|
−4 |
|
√ |
|
8 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
′′ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
− + |
|
|
|
|
|
|
− |
|
x + |
x |
8− ) |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
|
( ) = |
|
|
x |
|
|
|
4 x 8 |
2 |
x |
|
|
|
4 x 4 |
|
|
|
|
|
= |
8 |
» |
|
|
2 |
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
x |
|
− |
|
x |
+ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
( |
|
|
|
− |
+ |
) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
= |
|
|
|
− + |
|
|
− |
|
+ |
|
|
|
− |
|
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
» |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
» |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
( |
x2 |
|
− |
4 x |
+ |
8 |
) |
3 |
|
|
|
|
|
( |
x2 |
− |
4 x |
+ |
8 |
) |
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
nachweisen, dass die Funktion f an der Stelle x = 2 ein Minimum hat, denn f′′(2) > 0. Allerdings ist diese Methode aufwendiger. Wesentlich eleganter ist die folgende dritte Methode zum Nachweis eines Minimums: Die beiden Grenzwerte
√
lim 2 x2 − 4 x + 8 − 6 = ∞
x→±∞
garantieren, dass die Funktion f mindestens ein lokales Minimum besitzt. Da wir andererseits aus der Betrachtung der ersten Ableitung bereits wissen, dass die Funktion f höchstens einen Extremwert besitzt, muss der Extremwert an der Stelle x = 2 ein Minimum sein. Ì
Die Bedingungen für ein Maximum lassen sich analog zu den Bedingungen für ein Minimum formulieren.
Satz 6.13 (Bedingungen für ein Maximum)
Wenn eine di erenzierbare Funktion f an der Stelle x0
Lein lokales Maximum hat, dann besitzt sie dort eine waagrechte Tangente. Die Bedingung f′(x0) = 0 ist somit notwendig.
Leine waagrechte Tangente hat und zusätzlich rechts gekrümmt ist, dann hat sie dort ein lokales Maximum. Die Bedingung f′(x0) = 0 und f′′(x0) < 0 ist somit hinreichend.
Leine waagrechte Tangente hat und wenn die Ableitung f′ beim Durchgang durch x0 das Vorzeichen von plus nach minus wechselt, so hat f genau dann an der Stelle x0 ein lokales Maximum. Diese Bedingung ist somit notwendig und hinreichend.
276 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
6 Di erenzialrechnung |
|||||||||||||||||||
Beispiel 6.26 (Minima und Maxima) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
Die Funktion |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
|
|
|
|
4 x |
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
f (x) = |
|
|
|
|
|
||||
|
|
f(x) = |
|
|
|
4 x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
1+x2 |
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
1 |
|
x2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
besitzt die |
Ableitung |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
+ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
1 |
|
x2 |
|
|
1 x 1 x |
|
−3 −2 −1 |
|
|
|
|
1 2 |
3 |
x |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
′( ) = |
|
4 |
|
1 |
− |
|
= |
4 |
( −1 |
)( + ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
−2 |
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
f |
|
x |
|
|
|
|
|
x2 2 |
|
|
|
|
x2 2 |
|
, |
|
|
|
|
|
|
|
|
−1 |
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
6.22. Damit sind x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
siehe Beispiel |
|
|
1 die einzigen |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
( |
|
+ ) |
|
|
( |
+ ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
f einen Extremwert |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
Stellen, an denen die Funktion |
|
= ± |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
haben kann. |
|
|
|
|
|
1 wechselt f′ das Vorzeichen von minus nach plus. Es liegt an dieser Stelle |
||||||||||||||||||||||||||||||||||||||||
An der Stelle x |
|
|
|
|||||||||||||||||||||||||||||||||||||||||||
also ein |
Minimum vor. Für x |
|
1 wechselt f |
′ |
das Vorzeichen von plus nach minus. Somit hat f |
|||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
= − |
|
|
|
|
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ì |
|||||||
für x |
= |
1 ein Maximum. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
Beispiel 6.25 zeigt einen typischen Sachverhalt. Der Nachweis eines Extremwertes mithilfe der zweiten Ableitung kann zu umfangreichen Berechnungen führen. Oft führen andere Überlegungen schneller zum Ziel.
Nachweis eines Extremums
Der Nachweis eines Extremums durch das Vorzeichen der zweiten Ableitung ist in manchen Fällen sehr aufwendig. Oftmals ist es einfacher, die erste Ableitung bezüglich eines Vorzeichenwechsels zu untersuchen oder den Nachweis durch Grenzwertbetrachtungen zu führen. Der Test auf einen Vorzeichenwechsel hat außerdem den Vorteil, dass auch anstellen, an denen die zweite Ableitung null ist, entschieden werden kann, ob ein Extremum vorliegt oder nicht.
Sondersituationen treten am Rand des Definitionsbereichs auf. Bei der Suche nach Extrema sind die Funktionswerte am Rand unbedingt zu berücksichtigen.
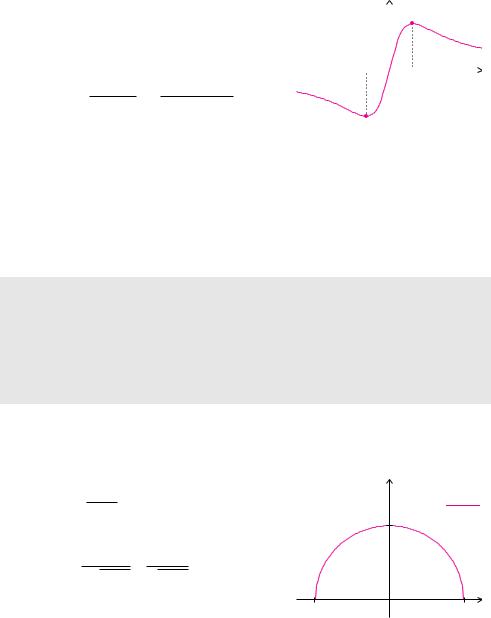
Beispiel 6.27 (Extrema am Rand)
Um die Extremwerte der Funktion |
|
y |
|||||
f x |
√1 x2 |
|
|
1 f(x) = √1 − x2 |
|||
zu bestimmen,( ) = betrachten− |
wir die erste Ableitung |
|
|
||||
f′ |
x |
2 |
2 x |
x |
|
|
|
−1 x2 |
1− x2 . |
|
|
||||
|
( ) = |
√ |
|
= √ |
|
|
|
Lediglich an der |
Stelle x 0 ist die erste Ableitung |
|
|
||||
|
− |
− |
|
|
|||
null. An dieser Stelle hat f=′ einen Vorzeichenwechsel |
−1 |
1 x |
|||||
von plus nach minus. Somit handelt es sich um ein
lokales Maximum. |
|
|
|
|
|
1 und x |
|
1. An diesen beiden |
|||
Der Definitionsbereich der Funktion erstreckt sich zwischen x |
|
|
|||||||||
Randstellen hat die Funktion den Wert null: |
f 1 |
|
1 |
|
1 |
2 |
|
0 |
. In |
der Umgebung dieser |
|
(± ) = |
|
|
|
= − |
|
= |
|
||||
|
|
|
− (± ) = |
|
|
|
|
||||
|
|
liegen laut Definition 6.10 an den Stellen |
|||||||||
beiden Stellen sind alle Funktionswerte positiv. Somit » |
|
|
|
|
|
|
|
Ì |
|||
x = ±1 lokale Minima vor. |
|
|
|
|
|
|
|
|
|
|
|