

- •1 Grundlagen
- •1.1 Logik und Mengen
- •1.1.1 Aussagenlogik
- •1.1.2 Mengen
- •1.2 Zahlen
- •1.2.1 Natürliche Zahlen
- •1.2.2 Ganze Zahlen
- •1.2.3 Rationale Zahlen
- •1.2.4 Reelle Zahlen
- •1.2.5 Ordnung
- •1.2.6 Intervalle
- •1.2.7 Betrag und Signum
- •1.2.8 Summe und Produkt
- •1.3 Potenz und Wurzel
- •1.3.1 Potenzen
- •1.3.2 Potenzgesetze
- •1.3.3 Wurzeln
- •1.3.4 Binomischer Satz
- •1.4 Trigonometrie
- •1.4.1 Trigonometrie im rechtwinkligen Dreieck
- •1.5 Gleichungen und Ungleichungen
- •1.5.1 Lineare Gleichungen
- •1.5.2 Potenzgleichungen
- •1.5.3 Quadratische Gleichungen
- •1.5.4 Wurzelgleichungen
- •1.5.5 Ungleichungen
- •1.6 Beweise
- •1.6.1 Direkter Beweis
- •1.6.2 Indirekter Beweis
- •1.6.3 Konstruktiver Beweis
- •1.6.4 Vollständige Induktion
- •1.7 Aufgaben
- •2 Lineare Gleichungssysteme
- •2.1 Einführung
- •2.2 Gauß-Algorithmus
- •2.2.1 Äquivalenzumformungen
- •2.2.2 Vorwärtselimination
- •2.2.3 Rückwärtseinsetzen
- •2.2.4 Gaußsches Eliminationsverfahren
- •2.2.5 Rechenschema
- •2.3 Spezielle Typen linearer Gleichungssysteme
- •2.3.1 Lineare Gleichungssysteme ohne Lösung
- •2.3.2 Lineare Gleichungssysteme mit unendlich vielen Lösungen
- •2.3.3 Systeme mit redundanten Gleichungen
- •2.3.4 Unterbestimmte lineare Gleichungssysteme
- •2.3.5 Überbestimmte lineare Gleichungssysteme
- •2.3.6 Homogene lineare Gleichungssysteme
- •2.3.7 Lineare Gleichungssysteme mit Parametern
- •2.4 Numerische Verfahren
- •2.4.1 Jakobi-Iteration
- •2.4.2 Gauß-Seidel-Iteration
- •2.5 Anwendungen
- •2.5.1 Produktion
- •2.5.2 Netzwerkanalyse in der Elektrotechnik
- •2.6 Aufgaben
- •3 Vektoren
- •3.2 Vektorrechnung ohne Koordinaten
- •3.2.1 Addition und Subtraktion
- •3.2.2 Skalare Multiplikation
- •3.2.3 Skalarprodukt
- •3.2.4 Vektorprodukt
- •3.2.5 Spatprodukt
- •3.2.6 Lineare Abhängigkeit und Komponentenzerlegung
- •3.3 Vektoren in Koordinatendarstellung
- •3.3.1 Koordinatendarstellung
- •3.3.2 Addition und Subtraktion
- •3.3.3 Skalare Multiplikation
- •3.3.4 Skalarprodukt
- •3.3.5 Vektorprodukt
- •3.3.6 Spatprodukt
- •3.3.7 Lineare Abhängigkeit und Komponentenzerlegung
- •3.4 Punkte, Geraden und Ebenen
- •3.4.1 Kartesisches Koordinatensystem
- •3.4.2 Parameterdarstellung von Geraden und Ebenen
- •3.4.3 Parameterfreie Darstellung von Geraden und Ebenen
- •3.4.4 Schnitte von Geraden und Ebenen
- •3.4.5 Abstände
- •3.4.6 Winkel
- •3.5 Anwendungen
- •3.5.1 Kraft
- •3.5.2 Arbeit
- •3.5.3 Drehmoment
- •3.6 Aufgaben
- •4 Matrizen
- •4.2 Rechnen mit Matrizen
- •4.2.1 Addition, Subtraktion und skalare Multiplikation
- •4.2.2 Multiplikation von Matrizen
- •4.3 Determinanten
- •4.3.1 Determinante einer (2,2)-Matrix
- •4.3.2 Determinante einer (3,3)-Matrix
- •4.3.3 Determinante einer (n,n)-Matrix
- •4.4 Inverse Matrix
- •4.4.1 Invertierbare Matrizen
- •4.4.2 Inverse einer (2,2)-Matrix
- •4.4.3 Inverse Matrix und lineares Gleichungssystem
- •4.5 Lineare Abbildungen
- •4.5.1 Matrizen als Abbildungen
- •4.5.2 Kern, Bild und Rang
- •4.6 Eigenwerte und Eigenvektoren
- •4.7 Numerische Verfahren
- •4.7.1 Potenzmethode
- •4.8 Anwendungen
- •4.9 Aufgaben
- •5 Funktionen
- •5.1 Einführung
- •5.1.2 Wertetabelle
- •5.1.3 Schaubild
- •5.1.4 Explizite und implizite Darstellung
- •5.1.6 Funktionsschar
- •5.1.7 Verkettung von Funktionen
- •5.2 Polynome und rationale Funktionen
- •5.2.1 Potenzfunktionen mit ganzen Hochzahlen
- •5.2.2 Polynome
- •5.2.3 Gebrochenrationale Funktionen
- •5.3 Eigenschaften
- •5.3.1 Symmetrie
- •5.3.2 Periode
- •5.3.3 Monotonie
- •5.3.4 Beschränktheit
- •5.4 Sinus, Kosinus und Tangens
- •5.4.2 Eigenschaften
- •5.5 Grenzwert und Stetigkeit
- •5.5.1 Zahlenfolgen
- •5.5.2 Grenzwert einer Funktion
- •5.5.3 Stetigkeit
- •5.5.4 Asymptotisches Verhalten
- •5.6.1 Exponentialfunktionen
- •5.6.2 Die e-Funktion
- •5.6.3 Hyperbelfunktionen
- •5.7 Umkehrfunktionen
- •5.7.1 Das Prinzip der Umkehrfunktion
- •5.7.2 Wurzelfunktionen
- •5.7.3 Arkusfunktionen
- •5.7.4 Logarithmusfunktionen
- •5.7.5 Area-Funktionen
- •5.8 Numerische Verfahren
- •5.8.1 Berechnung von Funktionswerten
- •5.8.2 Bisektionsverfahren
- •5.9 Anwendungen
- •5.9.1 Messwerte
- •5.9.2 Industrieroboter
- •5.10 Aufgaben
- •6.1 Steigung und Ableitungsfunktion
- •6.1.3 Ableitungsfunktion
- •6.1.5 Höhere Ableitungen
- •6.2 Ableitungstechnik
- •6.2.1 Ableitungsregeln
- •6.2.2 Ableitung der Umkehrfunktion
- •6.2.5 Zusammenfassung
- •6.3 Regel von Bernoulli-de l’Hospital
- •6.4 Geometrische Bedeutung der Ableitungen
- •6.4.1 Neigungswinkel und Schnittwinkel
- •6.4.2 Monotonie
- •6.4.3 Krümmung
- •6.4.4 Lokale Extrema
- •6.4.5 Wendepunkte
- •6.4.6 Globale Extrema
- •6.5 Numerische Verfahren
- •6.5.2 Newton-Verfahren
- •6.5.3 Sekantenverfahren
- •6.6 Anwendungen
- •6.6.1 Fehlerrechnung
- •6.6.2 Extremwertaufgaben
- •6.7 Aufgaben
- •7 Integralrechnung
- •7.1 Flächenproblem
- •7.1.1 Integralsymbol
- •7.1.2 Integral als Grenzwert von Summen
- •7.1.3 Bestimmtes Integral
- •7.2 Zusammenhang von Ableitung und Integral
- •7.2.1 Integralfunktion
- •7.2.2 Stammfunktion
- •7.2.3 Bestimmtes Integral und Stammfunktion
- •7.2.4 Mittelwertsatz der Integralrechnung
- •7.3 Integrationstechnik
- •7.3.1 Integrationsregeln
- •7.3.2 Integration durch Substitution
- •7.3.3 Partielle Integration
- •7.3.4 Gebrochenrationale Funktionen
- •7.3.5 Uneigentliche Integrale
- •7.4 Länge, Flächeninhalt und Volumen
- •7.4.1 Flächeninhalte
- •7.4.2 Bogenlänge
- •7.4.3 Rotationskörper
- •7.5 Numerische Verfahren
- •7.5.1 Trapezregel
- •7.5.2 Romberg-Verfahren
- •7.6 Anwendungen
- •7.6.2 Schwerpunkte und statische Momente ebener Flächen
- •7.7 Aufgaben
- •8 Potenzreihen
- •8.1 Unendliche Reihen
- •8.2 Potenzreihen und Konvergenz
- •8.3 Taylor-Reihen
- •8.4 Eigenschaften
- •8.5 Numerische Verfahren
- •8.5.1 Berechnung von Funktionswerten
- •8.6 Anwendungen
- •8.6.1 Normalverteilung in der Statistik
- •8.7 Aufgaben
- •9 Kurven
- •9.1 Parameterdarstellung
- •9.2 Kegelschnitte
- •9.3 Tangente
- •9.4 Krümmung
- •9.5 Bogenlänge
- •9.6 Numerische Verfahren
- •9.6.1 Bézier-Kurve
- •9.7 Anwendungen
- •9.7.1 Mechanik
- •9.7.2 Straßenbau
- •9.8 Aufgaben
- •10 Funktionen mit mehreren Variablen
- •10.1.2 Schaubild einer Funktion mit mehreren Variablen
- •10.1.3 Schnittkurven mit Ebenen und Höhenlinien
- •10.2 Grenzwert und Stetigkeit
- •10.2.1 Grenzwert einer Funktion mit mehreren Variablen
- •10.2.2 Stetigkeit
- •10.3.3 Gradient und Richtungsableitung
- •10.3.5 Höhere partielle Ableitungen
- •10.3.6 Extremwerte
- •10.4 Ausgleichsrechnung
- •10.4.1 Methode der kleinsten Fehlerquadrate
- •10.4.2 Ausgleichsrechnung mit Polynomen
- •10.4.3 Lineare Ausgleichsrechnung
- •10.5 Vektorwertige Funktionen
- •10.6 Numerische Verfahren
- •10.6.1 Mehrdimensionales Newton-Verfahren
- •10.6.2 Gradientenverfahren
- •10.7 Anwendungen
- •10.7.1 Fehlerrechnung
- •10.8 Aufgaben
- •11 Komplexe Zahlen und Funktionen
- •11.1.1 Komplexe Zahlen
- •11.1.2 Gaußsche Zahlenebene
- •11.1.3 Polarkoordinaten
- •11.1.4 Exponentialform
- •11.2 Rechenregeln
- •11.2.1 Gleichheit
- •11.2.2 Addition und Subtraktion
- •11.2.3 Multiplikation und Division
- •11.2.4 Rechnen mit der konjugiert komplexen Zahl
- •11.2.5 Rechnen mit dem Betrag einer komplexen Zahl
- •11.3 Potenzen, Wurzeln und Polynome
- •11.3.1 Potenzen
- •11.3.2 Wurzeln
- •11.3.3 Fundamentalsatz der Algebra
- •11.4 Komplexe Funktionen
- •11.4.1 Ortskurven
- •11.4.2 Harmonische Schwingungen
- •11.4.3 Transformationen
- •11.5 Anwendungen
- •11.5.1 Komplexe Wechselstromrechnung
- •11.6 Aufgaben
- •12.1 Einführung
- •12.1.3 Richtungsfeld und Orthogonaltrajektorie
- •12.2.1 Separation der Variablen
- •12.2.2 Lineare Substitution
- •12.3.3 Allgemeine Eigenschaften
- •12.4.1 Allgemeine Form
- •12.4.2 Freie Schwingung
- •12.4.3 Harmonisch angeregte Schwingung
- •12.4.4 Frequenzgänge
- •12.5.1 Eliminationsverfahren
- •12.5.2 Zustandsvariablen
- •12.5.5 Stabilität
- •12.6 Numerische Verfahren
- •12.6.1 Polygonzugverfahren von Euler
- •12.7 Anwendungen
- •12.7.1 Temperaturverlauf
- •12.7.2 Radioaktiver Zerfall
- •12.7.3 Freier Fall mit Luftwiderstand
- •12.7.4 Feder-Masse-Schwinger
- •12.7.5 Pendel
- •12.7.6 Wechselstromkreise
- •12.8 Aufgaben
- •13 Fourier-Reihen
- •13.1 Fourier-Analyse
- •13.1.1 Periodische Funktionen
- •13.1.2 Trigonometrische Polynome
- •13.1.3 Fourier-Reihe
- •13.1.4 Satz von Fourier
- •13.1.5 Gibbssches Phänomen
- •13.2 Komplexe Darstellung
- •13.2.1 Komplexe Fourier-Reihe
- •13.2.3 Spektrum
- •13.2.4 Minimaleigenschaft
- •13.3 Eigenschaften
- •13.3.1 Symmetrie
- •13.3.2 Integrationsintervall
- •13.3.3 Mittelwert
- •13.3.4 Linearität
- •13.3.5 Ähnlichkeit und Zeitumkehr
- •13.3.6 Zeitverschiebung
- •13.4 Aufgaben
- •14 Verallgemeinerte Funktionen
- •14.1 Heaviside-Funktion
- •14.2 Dirac-Distribution
- •14.3 Verallgemeinerte Ableitung
- •14.4 Faltung
- •14.5 Aufgaben
- •15 Fourier-Transformation
- •15.1 Integraltransformation
- •15.1.4 Transformation gerader und ungerader Funktionen
- •15.1.5 Darstellung mit Amplitude und Phase
- •15.2 Eigenschaften
- •15.2.1 Linearität
- •15.2.2 Zeitverschiebung
- •15.2.3 Amplitudenmodulation
- •15.2.4 Ähnlichkeit und Zeitumkehr
- •15.3 Inverse Fourier-Transformation
- •15.3.2 Vertauschungssatz
- •15.3.3 Linearität
- •15.4.3 Multiplikationssatz
- •15.4.5 Faltung
- •15.5 Periodische Funktionen
- •15.5.1 Fourier-Transformation einer Fourier-Reihe
- •15.5.3 Grenzwertbetrachtung
- •15.6 Anwendungen
- •15.6.1 Lineare zeitinvariante Systeme
- •15.7 Aufgaben
- •16 Laplace-Transformation
- •16.1 Bildbereich
- •16.2 Eigenschaften
- •16.2.1 Linearität
- •16.2.2 Ähnlichkeit
- •16.2.3 Zeitverschiebung
- •16.2.4 Dämpfung
- •16.3.2 Integration
- •16.3.3 Faltung
- •16.3.4 Grenzwerte
- •16.4 Transformation periodischer Funktionen
- •16.5 Rücktransformation
- •16.7 Anwendungen
- •16.7.1 Regelungstechnik
- •16.8 Aufgaben
- •17 z-Transformation
- •17.1 Transformation diskreter Signale
- •17.1.2 z-Transformation und Laplace-Transformation
- •17.2 Eigenschaften
- •17.2.1 Linearität
- •17.2.2 Verschiebung
- •17.2.3 Dämpfung
- •17.4 Anwendungen
- •17.4.1 Zeitkomplexität von Quicksort
- •A Anhang
- •A.1 Ableitungsregeln
- •A.2 Ableitungen
- •A.3 Potenzreihen
- •A.4 Integralregeln
- •A.5 Integrale
- •A.6 Fourier-Reihen
- •A.7 Fourier-Transformationen
- •A.8 Laplace-Transformationen
- •A.9 Griechisches Alphabet
- •A.10 Bedeutende Mathematiker
- •Literaturverzeichnis
- •Sachwortverzeichnis
372 |
9 Kurven |
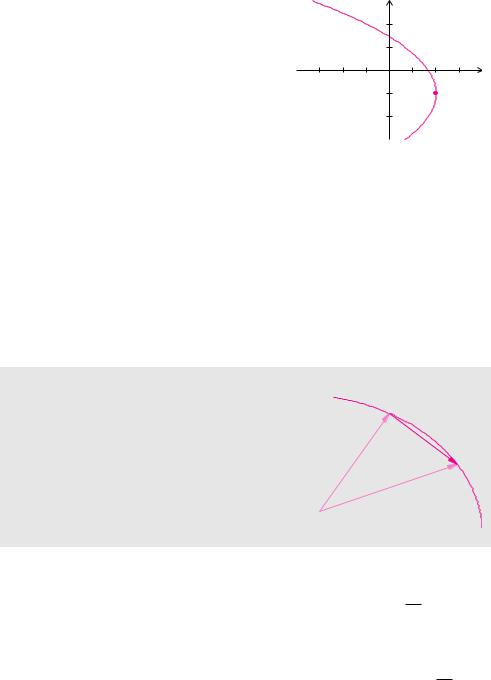
c) Wir betrachten die Kegelschnittgleichung
y2 − 3x + 2y − 5 = 0.
Der Term x2 ist nicht enthalten. Die Ergänzung von y zum vollständigen Quadrat führt auf die Gleichung
(y + 1)2 = −3(x − 2).
Damit ist der Kegelschnitt eine Parabel mit dem Scheitelpunkt M(2 S − 1).
y |
|
2 |
|
1 |
|
−3 −2 −1 |
1 2 3 x |
−1 |
S |
−2 |
|
Ì
9.3 Tangente
Ein wichtiges Prinzip in der Mathematik besteht darin, komplizierte Objekte durch einfachere Objekte anzunähern. Man verwendet dieses Prinzip etwa, um eine Funktion durch eine Tangente an einer bestimmten Stelle zu approximieren. Solange man sich in einer kleinen Umgebung der Stelle befindet, macht sich der Unterschied zwischen Funktion und Tangente kaum bemerkbar. Dasselbe Prinzip lässt sich auf Kurven übertragen. Die Tangente einer Kurve wird als Grenzwert definiert.
Definition 9.8 (Tangentenvektor und Tangente)
Der Tangentenvektor einer Kurve mit der Parameterdarstellung c(t) im Kurvenpunkt mit dem Parameterwert t0 ist definiert durch
c |
′ |
t |
0) = |
lim |
1 |
|
( |
c |
t |
0 |
+ |
t |
) − |
c |
t |
0)) |
. |
|
|||||||||||||||||
|
( |
t→0 t |
|
( |
|
|
( |
|
|||||||||
Die Gerade durch den Kurvenpunkt c(t0) mit dem Richtungsvektor c′(t0) nennt man die Tangente der Kurve zum Parameterwert t0.
O
|
|
) |
|
|
c |
( |
t 0 |
|
|
|
|
t |
||
|
|
|
||
|
|
|
+ |
) |
|
|
(t0 |
|
|
|
|
c |
|
|
Der Grenzwert für den Tangentenvektor ist koordinatenweise zu verstehen. Auf den ersten Blick fragt man sich vielleicht in Definition 9.8, warum man den Tangentenvektor nicht
als Grenzwert der Di erenz der beiden Ortsvektoren ohne den Vorfaktor 1 , also durch
|
|
|
|
|
|
|
|
t |
lim |
( |
c t |
0 |
+ |
t |
) − |
c t |
0)) |
t→0 |
( |
|
( |
definiert hat. Die Antwort auf diese Frage ist nahe liegend. Ohne den Faktor 1 würde t
sich im Grenzwert der Nullvektor ergeben.

9.3 Tangente |
373 |
Zur Bezeichnung des Tangentenvektors verwenden wir bei Kurven den Ableitungsstrich. Das deutet an, dass man den Tangentenvektor durch die erste Ableitung berechnen kann. Interpretiert man den Grenzwert für den Tangentenvektor koordinatenweise, dann ergibt sich der Tangentenvektor gerade aus den ersten Ableitungen der Koordinatenfunktionen.
Satz 9.2 (Tangentenvektor und Ableitung)
Die Ableitung der Parameterdarstellung einer Kurve c(t) nach dem Parameter t ergibt den Tangentenvektor der Kurve:
c |
|
t |
x |
′ |
t |
|
, |
t I, |
c |
|
t |
|
x′ |
t |
|
, |
t I. |
|
′ |
y |
t |
|
′ |
’ |
y |
′ |
(t) |
“ |
|||||||||
|
( ) = Œ ′ |
( ) |
‘ |
|
|
|
|
z |
t |
|
|
|||||||
|
|
|
|
|
( ) = – |
|
|
( ) — |
|
|||||||||
|
|
|
|
|
( ) |
|
|
|
|
|
|
” |
|
′( ) • |
|
|
||
Für eine sinnvolle Definition des Tangentenvektors müssen wir natürlich voraussetzen, dass die erste Ableitung jeder einzelnen Koordinatenfunktion existiert. Mit anderen Worten: Wir betrachten nur Kurven mit di erenzierbaren Koordinatenfunktionen.
Beispiel 9.8 (Tangentenvektoren ebener Kurven)
a) Die Kurve mit der Parameterdarstellung
c(t) = Π|
cos t |
‘ , t [0, 2 π] |
sin t |
hat den Tangentenvektor
c′(t) = Œ −cossin tt ‘ .
Lediglich die Richtung des Tangentenvektors ändert sich. Die Länge Sc′(t)S = sin2 t + cos2 t = 1 ist immer gleich.
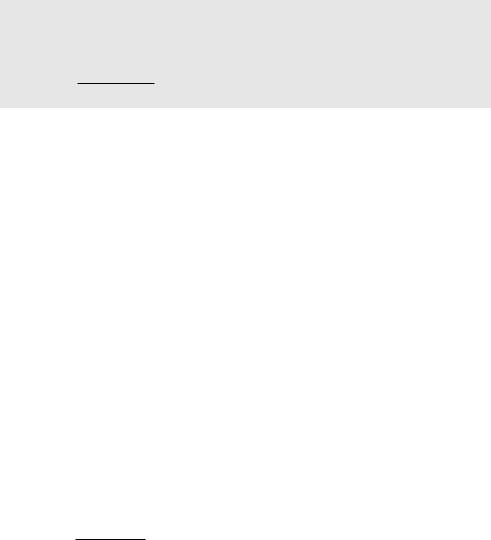
b) Die Parameterdarstellung
|
|
|
1 |
|
t |
|
|
|
|
|
c t |
) = |
|
Π|
1−2t2 |
‘ |
, |
t |
|
R |
|
1 |
t2 |
|||||||||
( |
|
+ |
− |
|
|
|
beschreibt ebenfalls den Einheitskreis, siehe Beispiel 9.1. Sie hat den Tangentenvektor
|
′ |
( ) = |
1 |
|
|
Π|
2 t2 |
2 |
‘ |
|
|
(1 + t ) |
|
−4− |
|
|
|||||
c |
|
t |
|
|
|
|
|
|
|
. |
|
|
|
|
2 |
2 |
|
t |
|
|
|
|
|
|
|
|
|
|
|
|
||
Die Längen der Tangentenvektoren an den Parameterwerten t = 0 und t = 1
Sc′(0)S = 2, Sc′(1)S = 1
y 
1
|
|
|
|
|
−1 |
1 |
x |
||
|
||||
−1
y 
1
|
|
|
|
|
−1 |
1 |
x |
||
|
||||
−1
sind unterschiedlich. Es ändert sich also nicht nur die Richtung des Tangentenvektors, sondern auch die Länge. Ì

374 |
9 Kurven |
In Beispiel 9.8 wird ein und dieselbe Kurve durch unterschiedliche Parametrisierungen beschrieben. Die Richtung der Tangentenvektoren ist unabhängig von der gewählten Parametrisierung. Die Wahl der Parametrisierung hat jedoch Einfluss auf die Länge der Tangentenvektoren. Man bezeichnet deshalb die Richtung der Tangente als eine geometrische Eigenschaft der Kurve. Die Länge der Tangente ist keine geometrische Eigenschaft der Kurve, denn sie hängt von der gewählten Parametrisierung ab. Die Länge des Tangentenvektors entspricht in der Physik der Geschwindigkeit, mit der die Kurve durchlaufen wird.
Definition 9.9 (Singulärer Punkt einer Kurve)
Ein Kurvenpunkt einer Kurve mit der Parameterdarstellung c(t), an dem der Tangentenvektor die Länge null hat, heißt singulärer Punkt. An einem singulären Punkt hält man beim Durchlaufen der Kurve kurz an. Besitzt der Tangentenvektor an einem singulären Punkt einen Vorzeichenwechsel, so spricht man von einem Umkehrpunkt.
Ändert sich die Länge des Tangentenvektors nicht, so wird die Kurve mit konstanter Geschwindigkeit durchlaufen. Für den Einsatz in Produktionsprozessen sind Parameterdarstellungen mit konstanter Geschwindigkeit besonders gut geeignet. Eine Parameterdarstellung mit der Eigenschaft Sc′(t)S = 1 nennt man Bogenlängenparametrisierung einer Kurve, siehe Definition 9.14. Diese Parametrisierung ist eindeutig. Allerdings ist es bei praktischen Problemen oft schwierig, die Bogenlängenparametrisierung zu bestimmen.
Beispiel 9.9 (Tangenten der Schraubenlinie)
Für die Schraubenlinie mit der Parameterdarstellung aus Beispiel 9.3 berechnen wir den Tangentenvektor durch Ableiten der Koordinatenfunktionen:
|
|
’ |
r cos t |
“ |
|
|
|
0 |
|
2 |
|
|
|
′ |
|
’ − |
r sin t |
“ |
|
||||
c |
t |
|
h |
, |
t |
|
, |
π n |
|
c |
t |
|
h |
. |
|||||||||
) = – |
r sin t |
— |
[ |
|
|
] Ô |
|
) = – |
r cos t |
— |
|||||||||||||
|
( |
|
2π t |
|
|
|
|
|
|
|
|
( |
|
2 π |
|
||||||||
|
|
” |
|
|
|
• |
|
|
|
|
|
|
|
|
|
|
|
” |
|
|
|
• |
|
Eine Parameterdarstellung der Tangente im Startpunkt der Kurve erhalten wir aus
g |
x c 0 λ c′ 0 |
’ |
r |
“ |
λ ’ |
0 |
“ , λ R. |
|
0 |
h |
|||||||
|
= ( ) + ( ) = – |
0 |
— + – |
r |
— |
|
||
2 π |
||||||||
|
|
” |
|
• |
” |
|
• |
|
|
|
|
|
|
||||
Dabei ist λ der Parameter in der Punktrichtungsform der Geraden g, siehe Definition 3.19. Ì
9.4 Krümmung
Die Krümmung einer Kurve ist ein Maß dafür, wie stark eine Kurve von der Geraden abweicht. Eine Gerade hat überall die Krümmung null. Krümmungswerte sind auf den Kreis normiert. Einem Kreis mit Radius r ordnet man den konstanten Krümmungswert
κ= 1 zu. Kreise mit kleinen Radien r haben große Krümmungen κ, Kreise mit großen r
Radien r haben kleine Krümmungen κ.
9.4 Krümmung |
375 |
Definition 9.10 (Krümmung einer Raumkurve)
Die Krümmung κ(t) einer Raumkurve mit der Parameterdarstellung c(t) ist definiert durch
κ(t) = Sc′(t) × c′′(t)S.
Sc′(t)S3
Für die Krümmung benötigen wir also die erste und die zweite Ableitung der Parameterdarstellung. Aus diesen beiden Vektoren wird das Kreuzprodukt gebildet. Außerdem benötigt man noch die Länge dieses Kreuzproduktvektors und die Länge des Tangentenvektors. Die Krümmung ist eine geometrische Eigenschaft der Kurve. Man kann unterschiedliche Parametrisierungen derselben Kurve betrachten. Es ergibt sich in ein und demselben Kurvenpunkt bei unterschiedlichen Parameterdarstellungen stets derselbe Krümmungswert.
Beispiel 9.10 (Krümmung der Schraubenlinie)
Die Schraubenlinie mit der Parameterdarstellung aus Beispiel 9.3 hat folgende Ableitungen der
Koordinatenfunktionen: |
|
|
|
|
|
|
|
|
|
|||||
|
|
’ |
r cos t |
“ |
|
′ |
’ − |
r sin t |
“ |
|
||||
c |
t |
|
h |
c |
|
h |
, |
|||||||
) = – |
r sin t |
— Ô |
|
t |
r cos t |
— |
||||||||
|
( |
|
2π t |
|
|
( ) = – |
|
2 π |
|
|||||
|
|
” |
|
|
|
• |
|
|
” |
|
|
|
• |
|
’ −r cos t “ c′′(t) = – −r sin t — .
” 0 •
Für den Betrag des Vektorproduktes aus c′ |
|
|
t |
|
und c′′ |
|
t |
|
erhalten wir |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||
|
c |
|
|
t |
|
c |
|
|
t |
|
R |
|
|
|
rh |
|
cos t |
R |
|
r |
|
|
|
|
|
h2 |
sin2 t |
|
|
|
|
h2 |
cos2 t |
r2 r |
|
|
h2 |
|
r2, |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
R |
|
|
|
2rhπ |
|
sin t |
|
R |
|
|
( ) |
|
|
|
|
|
|
|
|
( ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2π |
|
|
|
|
|
|
|
|
¾ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
¾ |
|
|
|
|
|
|
||||||
|
|
′ |
|
|
|
|
|
′′ |
|
|
|
R’ |
|
|
|
|
|
|
|
“R |
|
|
|
|
|
|
|
4 |
π |
|
|
|
|
|
|
|
|
|
4 |
π |
|
|
|
|
4 |
π |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
R |
|
|
|
|
|
2 |
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
R |
|
|
|
r |
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
R– |
|
|
|
|
|
—R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
R |
|
− |
|
|
|
|
|
R |
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+ |
|
|
|
|
+ = |
|
|
|
|
+ |
|
|
||||||
T ( ) × ( )T = R– |
|
|
|
|
|
—R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
R– |
|
|
|
|
|
|
|
—R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
R” |
|
|
|
|
|
|
|
•R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
Rc |
|
t |
) |
|
|
|
|
sichR |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
und für den Betrag vonR |
′( |
ergibt |
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
T |
c |
|
|
t |
)T = |
¾ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
¾ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
r2 sin2 t |
|
|
r2 cos2 t |
|
|
|
h |
2 |
|
|
|
r2 |
|
|
|
h 2 . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
′ |
( |
|
|
|
|
|
|
|
|
+ |
|
|
|
|
|
+ |
|
|
|
|
|
|
= |
|
|
|
|
|
|
|
+ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4π |
|
|
|
|
|
|
|
|
|
|
|
4π |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
Laut Definition 9.10 erhalten wir für die Krümmung der Schraubenlinie |
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||
κ t |
|
|
c′ |
|
t |
|
c′′ |
t |
|
|
|
|
r |
|
|
|
|
|
|
|
|
|
|
4π2 r |
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
3 |
|
|
|
|
|
h2 |
|
|
|
|
|
|
|
|
|
2 |
2 |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
S |
|
|
|
( c) ×t |
( |
)S |
= |
|
|
+ |
r2 |
= |
h |
|
+ |
4π |
r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ì |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
4π2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
( ) = |
|
|
|
|
S |
′( |
)S |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
Eine ebene Kurve kann man als Raumkurve interpretieren, die in der Ebene z = 0 liegt. Dadurch kann man Definition 9.10 verwenden, um eine Formel für die Krümmung einer ebenen Kurve herzuleiten:
c t |
|
x t |
|
c |
|
t |
|
x′ |
t |
|
c |
|
t |
|
x′′ |
t |
|
. |
||
’ |
y(t) |
“ |
′ |
’ |
y |
|
(t) |
“ |
′′ |
’ |
y |
|
(t) |
“ |
||||||
|
0 |
|
|
|
′0 |
|
|
|
′′0 |
|
||||||||||
( ) = – ( ) — Ô |
|
|
( ) = – |
|
|
( ) — Ô |
|
|
( ) = – |
|
|
( ) — |
|
|||||||
|
” |
|
• |
|
|
|
” |
|
|
|
• |
|
|
|
” |
|
|
|
• |
|

376 |
9 Kurven |
Der Tangentenvektor hat die Länge
Sc′(t)S = »x′(t)2 + y′(t)2
und das Kreuzprodukt der ersten und zweiten Ableitung berechnen wir nach Satz 3.14 zu
|
|
|
|
|
|
|
x′ |
t |
|
x′′ |
t |
|
|
|
|
0 |
|
|
c |
′ |
t |
c |
′′ |
t |
’ |
y |
(t) |
“ ’ |
y |
(t) |
“ ’ |
x t y |
|
0 |
|
t |
|
|
|
( ) × |
|
|
( ) = – |
|
( ) — × – |
|
( ) — = – |
′ |
( ) |
′′ |
( ) − |
′′ |
( ) |
|||
|
|
|
|
|
|
” |
|
|
• ” |
|
|
• ” |
|
|
|
|||
Somit erhalten wir für die Krümmung einer ebenen Kurve die Formel
κ t |
S |
x′ |
t |
|
y′′ t |
|
x′′ t y′ |
|
t |
. |
|||
( ) = |
|
( |
) x |
(t )2− |
|
y |
(t)2 |
( |
)S |
||||
|
|
¼ |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
( |
′( ) |
+ |
|
′( ) ) |
3 |
|
|
||
|
|
|
|
|
|
|
|
||||||
“
— . y′(t) •
Definition 9.11 (Krümmung einer ebenen Kurve)
Die Krümmung κ(t) einer ebenen Kurve mit der Parameterdarstellung c(t) und den Koordinatenfunktionen x(t) und y(t) ist definiert durch
κ t |
S |
x′ |
t |
|
y′′ t |
|
x′′ t y′ |
|
t |
. |
|||
( ) = |
|
( |
) x |
(t )2− |
|
y |
(t)2 |
( |
)S |
||||
|
|
¼ |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
( |
′( ) |
+ |
|
′( ) ) |
3 |
|
|
||
|
|
|
|
|
|
|
|
||||||
Manchmal wird in der Literatur die Krümmung in der Ebene auch vorzeichenbehaftet definiert. Dazu lässt man den Betrag im Zähler der Definition der Krümmung weg.
Beispiel 9.11 (Krümmung)
Wir überprüfen die Formel für die Krümmung einer ebenen Kurve anhand einer Parameterdarstellung eines Kreises mit Radius r. Dazu benötigen wir die erste und die zweite Ableitung
c(t) = Π|
x0 |
r cos t |
‘ Ô |
|
|
|
|
|
r sin t |
‘ , |
c′′(t) = Œ |
r cos t |
‘ . |
||||
|
y0 |
+ r sin t |
|
c′(t) = Œ −r cos t |
−r sin t |
||||||||||||
Für die Krümmung |
+gilt dann |
|
|
|
|
|
|
|
|
− |
|
||||||
κ |
t |
|
|
|
r2 sin2 t |
r2 cos2 t |
3 |
|
r2 |
1 |
|
|
|
|
|||
|
|
T r2 sin2 t+ |
r2 cos2 tT |
|
r3 |
|
r . |
|
|
|
|
||||||
|
( |
) = |
¼ |
|
|
|
|
= |
|
= |
|
|
|
|
|
|
|
|
|
|
|
die Krümmung konstant und entspricht dem Kehrwert des Radius. |
Ì |
||||||||||||
Wie erwartet ist ( |
+ |
) |
|
|
|
|
|
|
|
|
|
|
|||||
Definition 9.12 (Krümmungskreis einer ebenen Kurve)
Der Mittelpunkt des Krümmungskreises einer ebenen Kurve im Punkt c(t0) liegt auf der Geraden, die senkrecht zur Tangente durch den Punkt c(t0) verläuft. Zum Kurvenpunkt hat er den Abstand
r(t0) = 1 . κ(t0)
Der Krümmungskreisradius entspricht dem Kehrwert der Krümmung.