622 |
16 Laplace-Transformation |
Wir kennen für die Lösungen x und y im Zeitbereich noch keine expliziten Formeln. Trotzdem ermöglichen die Grenzwertsätze aus Satz 16.10 bereits Aussagen über das Langzeitverhalten der Lösungen
t→∞ ( |
) = s→0 ‰ |
s X |
( |
)Ž = ∞ |
, |
t→∞ |
( |
) = s→0 |
‰ |
( )Ž = ∞ |
. |
lim x t |
lim |
s |
|
lim y |
t |
lim |
s Y |
s |
Mit den Nennernullstellen s1 = 0, s2 = −1 und s3 = 12 lässt sich die Rücktransformation durch eine Partialbruchzerlegung bestimmen:
X |
|
|
3 |
|
4 |
|
1 |
|
Y |
|
2 |
|
2 |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
= |
−s |
+ |
s 21 |
− |
s 1 |
= |
−s |
+ |
s 21 |
|
|||||||
|
|
|
|||||||||||||||
|
|
|
|
− |
|
+ |
|
|
= |
−2 |
+ |
|
− |
|
|||
x = |
−3 + |
4 e 21 t − |
e−t |
y |
2 e 21 t |
Ì |
|||||||||||
Lineare Di erenzialgleichungssysteme mit konstanten Koe zienten
Die Laplace-Transformation kann man zur Lösung linearer Di erenzialgleichungssysteme mit konstanten Koe zienten verwenden. Dabei ist im Bildbereich ein lineares Gleichungssystem mit Parameter zu lösen.
Das Di erenzialgleichungssystem aus Beispiel 16.17 lässt sich auch durch Einführen von Zustandsgrößen mit den Methoden aus Abschnitt 12.5 lösen. Dabei entstehen jedoch (4, 4)-Matrizen. Im Gegensatz dazu erzeugt die Laplace-Transformation lediglich ein Gleichungssystem, das sich mit einer (2, 2)-Matrix beschreiben lässt.
16.7 Anwendungen
Eine der wichtigsten Anwendungen der Laplace-Transformation ist die Regelungstechnik. Die klassische Regelungstechnik kombiniert die Theorie linearer zeitinvarianter Systeme mit der Laplace-Transformation. Wir beziehen uns in diesem Abschnitt auf die Begri e und Ergebnisse aus Abschnitt 15.6.1.
16.7.1 Regelungstechnik
Die Regelungstechnik ist ein Teil der Automatisierungstechnik, die sich mit dem Messen, Steuern und Regeln technischer Systeme beschäftigt. Im Gegensatz zur reinen Steuerung erfolgt beim Regeln ein Abgleich zwischen Sollund Istwerten. Durch negative Rückkopplung entsteht dabei ein geschlossener Regelkreis. Wir betrachten ausschließlich lineare Übertragungsglieder, die sich mathematisch als lineare zeitinvariante Systeme beschreiben lassen, siehe Abschnitt 15.6.1. Solche Übertragungsglieder lassen sich im Zeitbereich durch lineare Di erenzialgleichungen in der Form
an x(on) + . . . + a2 x¨o + a1 x˙o + a0 xo = bm x(im) + . . . + b2 x¨i + b1 x˙i + b0 xi

16.7 Anwendungen |
623 |
darstellen. Es besteht also ein linearer Zusammenhang zwischen dem Eingangssignal xi inklusive seiner Ableitungen bis zur Ordnung m und dem Ausgangssignal xo inklusive seiner Ableitungen bis zur Ordnung n. Typischerweise sind zum Zeitpunkt t = 0 alle Funktionswerte und Werte der Ableitungen sowohl des Eingangsals auch des Ausgangssignals null. Wir transformieren die Di erenzialgleichung deshalb mit Nullanfangsbedingungen
|
|
( |
0 |
) = |
0, x˙ |
|
( |
0 |
) = |
(i |
|
) |
( |
0 |
) = |
0, x |
|
( |
0 |
) = |
0, x˙ |
|
( |
0 |
) = |
( |
|
) |
( |
0 |
) = |
0 |
x |
i |
i |
0, . . . , x |
m |
|
o |
o |
0, . . . , x |
n |
|
||||||||||||||||||||||
in den |
|
|
|
|
|
|
|
|
|
|
|
o |
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Bildbereich:
(an sn + . . . + a2 s2 + a1 s + a0)Xo(s) = (bm sm + . . . + b2 s2 + b1 s + b0)Xi(s).
Nach Definition 15.7 ist die Übertragungsfunktion G das Verhältnis von Ausgangssignal im Bildbereich Xo zum Eingangssignal im Bildbereich Xi:
|
|
|
Xo |
s |
|
bm sm |
. . . |
b s2 |
|
b1 s b0 |
||||
G |
s |
) = |
Xi |
(s) |
= |
an sn |
+. . . |
|
+a22s2 |
+a1 s |
+a0 |
. |
||
( |
|
|
( ) |
|
+ |
|
+ |
+ |
|
+ |
|
|||
Somit ist jedes lineare Übertragungsglied durch seine Übertragungsfunktion G charakterisiert. Wenn xo das Ausgangssignal zum Eingangssignal xiist, dann gilt aufgrund der Linearität und der Zeitinvarianz des Systems
S
xi(t) Ð→ xo(t) Ô Xo(s) = G(s) Xi(s).
Dabei sind Xi und Xo die Laplace-Transformierten des Einganssignals xi und des Ausgangssignals xo.
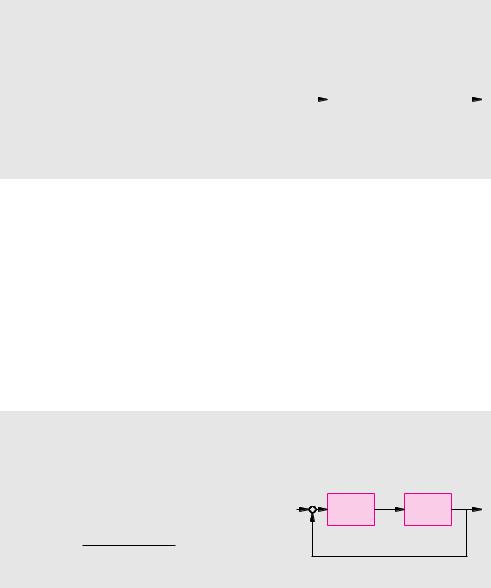
Bei der Reihenschaltung zweier Systeme wird das Ausgangssignal des ersten Systems als Eingangssignal des zweiten Systems verwendet:
S1 |
S2 |
o2(t). |
i1(t) Ð→ |
o1(t) = i2(t) Ð→ |
Entsprechend gilt im Bildbereich
O1(s) = G1(s) I1(s) Ô O2(s) = G2(s) O1(s) = G2(s) G1(s) I1(s).
Dabei sind I1, I2 und O1, O2 die Laplace-Transformierten der Einganssignale i1, i2 und der Ausgangssignale o1, o2. Mit G1 und G2 werden die Übertragungsfunktionen der beiden Systeme S1 und S2 bezeichnet. Das Gesamtsystem mit der Eingabegröße i1 und der Ausgabegröße o2 wird im Bildbereich durch das Produkt der beiden Übertragungsfunktionen beschrieben.
Übertragungsfunktion von Systemen in Reihenschaltung
Die Reihenschaltung der beiden Systeme mit den Übertragungsfunktionen G1 und G2 ergibt ein System mit der Übertragungsfunktion
G(s) = G1(s) G2(s). |
I(s) |
G1(s) |
|
|
G2(s) |
O(s) |
||
|
|
|
|
|
|
|||
Bei der Reihenschaltung werden die Übertragungsfunktionen multipliziert.