


460 |
12 Gewöhnliche Di erenzialgleichungen |
In manchen Fällen ist es kompliziert oder sogar unmöglich, die allgemeine Lösung einer Di erenzialgleichung zu bestimmen. Dann ist man auf andere Lösungsmethoden für Anfangsund Randwertprobleme angewiesen. Oft verwendet man in solchen Fällen numerische Verfahren zur Bestimmung einer Näherungslösung. Diese Verfahren betrachten wir in Abschnitt 12.6.
Während eine Di erenzialgleichung der Ordnung n zusammen mit n Anfangswerten in aller Regel eindeutig lösbar ist, ist dies bei n Randwerten oftmals nicht der Fall.
Beispiel 12.8 (Randwertprobleme ohne eindeutige Lösung)
a) Die Di erenzialgleichung des Randwertproblems
y′′ + 9y = 0, y(0) = 1, y(π) = 0
hat die allgemeine Lösung y(x) = C1 sin (3x) + C2 cos (3x). Aus dem ersten Randwert ergibt sich C2 = 1. Damit ist y(π) = −1, unabhängig von der Konstanten C2. Die zweite Randbedingung ist nicht erfüllbar. Dieses Randwertproblem besitzt also keine Lösung.
b) Betrachtet man dagegen das Randwertproblem
y′′ |
9y 0, y 0 1, y |
π |
1, |
|
|
|
|
|
so sind+alle=Funktionen( ) =der Form( |
)y=x− |
C1 sin |
3x |
cos |
3x |
Lösungen. Dieses Randwert- |
||
problem besitzt also unendlich |
viele Lösungen. |
( ) + |
( |
) |
Ì |
|||
|
( ) = |
|
||||||
Definition 12.7 (Partikuläre Lösung)
Eine einzelne Lösungsfunktion einer gewöhnlichen Di erenzialgleichung nennt man spezielle Lösung oder partikuläre Lösung.
In der Theorie der Di erenzialgleichungen gibt es Sätze, die darüber Auskunft geben, unter welchen Bedingungen ein Anfangswertoder Randwertproblem überhaupt lösbar ist und ob es im Falle der Lösbarkeit eine eindeutige Lösung gibt. Dazu wird neben der üblichen Stetigkeit von Funktionen die nach Rudolf Otto Sigismund Lipschitz benannte Lipschitz-Stetigkeit verwendet, siehe [Heuser:DGL].
12.1.3 Richtungsfeld und Orthogonaltrajektorie
Wir betrachten in diesem Abschnitt Di erenzialgleichungen erster Ordnung in expliziter Form
y′ = f(x, y).
An jeder Stelle (x, y), an der die rechte Seite der Di erenzialgleichung definiert ist, wird durch die Di erenzialgleichung eine Steigung festgelegt. Wenn wir nun in entsprechend vielen Punkten diese Tangentenrichtungen grafisch veranschaulichen, dann lässt sich der Verlauf der Lösungen erkennen. Lösungsfunktionen verlaufen nämlich immer tangential zu diesen Richtungen. Besonders elegant kann man diese sogenannten Richtungsfelder mit Computerprogrammen erzeugen.
462 |
12 Gewöhnliche Di erenzialgleichungen |
Bei Stabilitätsuntersuchungen in Abschnitt 12.5.5 werden wir Gleichgewichtspunkte nochmals genauer betrachten.
Nun kann man an jeder Stelle die zur Steigung der Di erenzialgleichung senkrechte Steigung betrachten. So gelangt man zur Di erenzialgleichung der Orthogonaltrajektorien.
Definition 12.9 (Di erenzialgleichung der Orthogonaltrajektorien)
Ersetzt man in einer Di erenzialgleichung erster Ordnung die Steigung durch den negativen Kehrwert, so bezeichnet man diese neue Di erenzialgleichung als Di erenzialgleichung der Orthogonaltrajektorien.
Beispiel 12.10 (Orthogonaltrajektorie) |
|
|
|
|||||
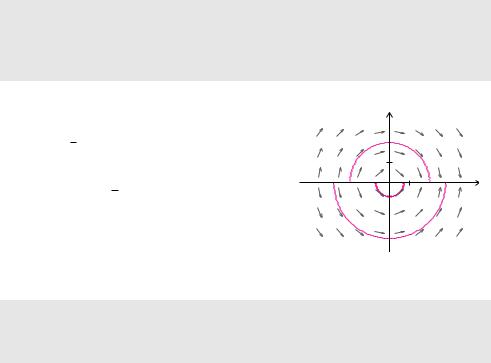
Die Linienelemente der Di erenzialgleichung |
y |
|
||||||
|
|
x |
|
|
|
|
|
|
|
|
y′ = − y |
|
|
|
|
1 |
|
stehen senkrecht auf den Linienelementen der Di e- |
|
|
||||||
renzialgleichung y′ |
|
y |
. Das Richtungsfeld |
besteht |
1 |
x |
||
|
x |
|||||||
aus |
Linienelementen, |
die orthogonal zu |
den Ur- |
|
|
|||
|
= |
|
|
|
|
|
||
sprungsgeraden verlaufen. Auf der x-Achse, also für |
|
|
||||||
y |
= |
0, sind formal |
keine Linienelemente definiert. |
|
|
|||
Dem Richtungsfeld kann man entnehmen, dass die |
|
Ì |
||||||
Lösungsfunktionen Kreise um den Ursprung sind. |
|
|||||||
Orthogonaltrajektorien
Alle Lösungsfunktionen der ursprünglichen Di erenzialgleichung und der zugehörigen Di erenzialgleichung der Orthogonaltrajektorien stehen überall senkrecht zueinander.
12.1.4 Di erenzialgleichung und Funktionenschar
Die allgemeine Lösung einer Di erenzialgleichung besteht in der Regel aus unendlich vielen Lösungsfunktionen, die mehr oder weniger ähnliches Verhalten aufweisen. Solche Funktionen lassen sich oftmals als Funktionenschar beschreiben. Nun kann man sich umgekehrt die Frage stellen, wie man zu einer gegebenen Funktionenschar eine Di erenzialgleichung herleiten kann, die diese Funktionenschar als Lösung hat.
Beispiel 12.11 (Di erenzialgleichung der Exponentialfunktion)
Die Exponentialfunktionen
y |
x |
) = |
C e−2 x, C |
|
R |
( |
|
|
|
beschreiben eine Funktionenschar mit dem Scharparameter C. Wir suchen eine Di erenzialgleichung, die genau diese Funktionen als allgemeine Lösung besitzt. Die Ableitung
y′(x) = −2 C e−2 x
12.2 Di erenzialgleichungen erster Ordnung |
463 |
ist noch nicht unsere gesuchte Di erenzialgleichung, denn diese Gleichung enthält immer noch den Parameter C. Diese Gleichung stellt eine Schar von Di erenzialgleichungen dar und nicht eine einzige Di erenzialgleichung. Wenn wir jedoch die Gleichung von y(x) und von y′(x) nach C auflösen und gleichsetzen
C |
|
y |
|
x |
|
e2 x |
, C |
1 |
|
|
x |
|
e2 x |
|
y |
x |
|
e2 x |
1 |
x e2 x |
, |
||||
|
|
|
|
2 y′ |
|
|
|
|
|
2 y′ |
|||||||||||||||
|
= |
|
( |
|
) |
|
|
= − |
|
|
( |
|
) |
|
Ô |
y( |
|
) |
|
y |
= − |
|
|
( ) |
Ì |
dann ergibt sich die gesuchte Di erenzialgleichung |
′ = −2 |
|
. |
|
|
|
|||||||||||||||||||
Mit der Vorgehensweise aus Beispiel 12.11 lässt sich in der Regel zu einer gegebenen Funktionenschar eine Di erenzialgleichung bestimmen, die genau diese Funktionenschar als allgemeine Lösung besitzt.
Di erenzialgleichung einer Funktionenschar
Wenn man diejenige Di erenzialgleichung bestimmen möchte, die eine bestimmte Funktionenschar als Lösung hat, dann kann man folgendermaßen vorgehen:
(1)Bestimme die Ableitung der Funktionsgleichung der Funktionenschar.
(2)Eliminiere den Scharparameter.
Beispiel 12.12 (Di erenzialgleichung der Ursprungskreise)
Die Ursprungskreise
x2 + y2 = r2, r > 0
beschreiben eine Funktionenschar mit dem Scharparameter r. Mithilfe der Methode des impliziten Di erenzierens, siehe Abschnitt 6.2.4,
2 x + 2 y y′ = 0 |
Ô y′ |
= − |
x |
|
y |
|
|||
erhalten wir eine Di erenzialgleichung, deren allgemeine Lösung aus den Ursprungskreisen besteht, vergleiche Beispiel 12.10. Ì
12.2 Di erenzialgleichungen erster Ordnung
Bei den meisten Di erenzialgleichungen erster Ordnung kann man die allgemeine Lösung durch Separation ermitteln. Separation der Variablen ist ein Lösungsverfahren, das sich direkt anwenden lässt oder manchmal nach einer geeigneten Substitution zum Erfolg führt. Wir werden zwei unterschiedliche Substitutionen, nämlich die lineare Substitution und die Ähnlichkeitssubstitution, in Betracht ziehen. Es gibt noch zahlreiche weitere Verfahren zur Lösung spezieller Typen von Di erenzialgleichungen, die alleine ein Buch füllen würden. Trotzdem sei an dieser Stelle ausdrücklich darauf hingewiesen, dass bis heute für viele Di erenzialgleichungen keine expliziten Lösungen bekannt sind.