


 y x
y x 


10.3 Di erenziation |
|
|
|
|
|
|
401 |
||||
Man kann die Richtungsableitung auch direkt durch die Grenzwertbildung |
|||||||||||
f |
x, y |
lim |
f |
|
x, y |
hr |
f |
|
x, y |
|
|
|
(( |
|
) + h ) − |
|
( |
|
) |
|
|||
r( |
|
) = h→0 |
|
|
|
|
|||||
bestimmen. Wählt man als Richtungen den Einheitsvektor in Richtung der positiven x-Achse ex und den Einheitsvektor in Richtung der positiven y-Achse ey, so ergeben sich als Spezialfall die bekannten partiellen Ableitungen:
fex |
( |
x, y |
) = |
f |
( |
x, y |
) Π|
1 |
‘ = ‰ |
fx |
( |
x, y |
) |
, fy |
( |
x, y |
)Ž Œ |
1 |
‘ = |
fx |
( |
x, y |
) |
|||||||||||||
0 |
0 |
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
fey (x, y) = f(x, y) Œ 1 ‘ = ‰fx(x, y), fy(x, y)Ž Œ 1 ‘ = fy(x, y) |
||||||||||||||||||||||||||||||||||||
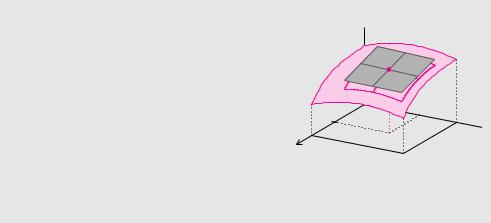
Beispiel 10.17 (Richtungsableitung) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
Die Funktion f |
|
|
x, y |
|
|
|
» |
|
|
|
|
|
|
hat laut Beispiel 10.16 an der Stelle |
|
1, 2 |
|
|
den Gradienten |
|||||||||||||||||
( |
) 1= |
x2 |
+ |
y2 |
( |
) |
||||||||||||||||||||||||||||||
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
f(1, 2) = Π|
√ |
|
, |
√ |
|
|
‘ . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
5 |
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Wir bestimmen die Richtungsableitung in Richtung x = y, also für den Winkel α = π4 . Der nor-
|
|
|
|
|
|
|
1 |
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
mierte Richtungsvektor ist r = |
√ |
|
|
Π|
1 |
‘. Die Richtungsableitung in Richtung r lautet somit |
|
|||||||||||||||||||||||
2 |
|
|
||||||||||||||||||||||||||||
fr |
|
1, 2 |
1 |
1, 2 |
1 |
|
|
|
1 |
|
1 |
|
1 |
|
1 |
|
2 |
|
1 |
3 |
|
Ì |
||||||||
|
5 |
2 |
|
|
1 |
|
10 |
|
|
|
|
10 . |
||||||||||||||||||
|
( |
|
) = |
√ |
|
( |
) |
√ |
|
Π|
|
‘ = |
√ |
|
( |
|
|
|
+ |
|
|
|
) = |
√ |
|
|
|
|||
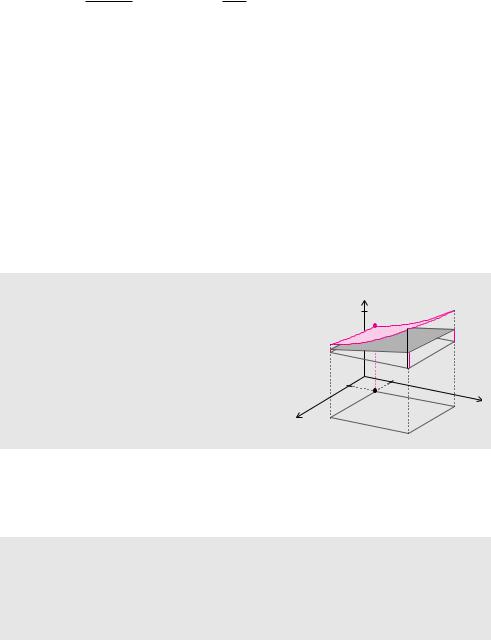
Geometrisch hat der Gradient eine wichtige Bedeutung. Fasst man den Gradienten einer Funktion als Richtung auf, so zeigt der Gradient gerade in die Richtung des steilsten Anstiegs der Funktion an dieser Stelle. Das heißt, die Richtungsableitung in Richtung des Gradienten f = (fx, fy) ist größer als alle anderen Richtungsableitungen.
Satz 10.2 (Geometrische Bedeutung des Gradienten)
Der Gradient einer Funktion f an der Stelle (x0, y0) zeigt, als Richtung interpretiert, in die Richtung des steilsten Anstiegs der Funktion f an der Stelle (x0, y0).
Zum Nachweis von Satz 10.2 nehmen wir eine beliebige Richtung r = Œ rx ‘ und beginnen ry
trickreich mit der Gleichung
(fx ry − fy rx)2 ≥ 0 fx2 ry2 + fy2 rx2 ≥ 2 fx fy rx ry.
Diese Ungleichung können wir erweitern zu
fx2 rx2 + fx2 ry2 + fy2 rx2 + fy2 ry2 ≥ fx2 rx2 + 2 fx fy rx ry + fy2 ry2.

10.3 Di erenziation |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
403 |
|||||||
Beispiel 10.18 (Totales Di erenzial) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
Wir möchten eine gute Näherung des Werts c |
|
|
|
|
|
|
|
|
|
ohne Taschenrechner berechnen. |
|||||||||||||||||||||
= |
√ |
2.982 |
+ |
4.012 |
|||||||||||||||||||||||||||
Dazu schreiben wir |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
» |
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
= |
√ |
|
|
|
|
|
. |
|
|
|
|||||
c |
|
3 |
|
0.02 |
|
2 |
|
4 |
|
0.01 2 |
, |
32 |
|
42 |
|
|
|
||||||||||||||
|
= ( |
|
− |
|
|
|
) |
|
+ ( |
|
+ |
|
|
) |
|
|
|
|
|
|
|
+ |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
x, y |
|
»x |
2 |
|
y |
2 |
|
|
|
|
|
|
|||||||||||
Wir betrachten die Funktion f |
( |
) = |
|
|
|
und bilden die partiellen Ableitungen |
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
x |
|
|
|
|
|
|
+ y |
|
|
|
|
|
|
|
|||||||||
fx(x, y) = |
» |
|
, fy(x, y) = |
» |
|
. |
|
|
|
||||||||||||||||||||||
x2 + y2 |
x2 + y2 |
|
|
|
|||||||||||||||||||||||||||
Hierbei interessant ist die Stelle (x0, y0) = (3, 4). Mithilfe des Di erenzials können wir die Abweichung f vom Wert f(3, 4) = 5 durch das Di erenzial df annähern: f ≈ df = fx dx + fy dy. Mit Zahlwerten bedeutet dies
3 |
|
4 |
|
|
|
|
|
|
|
|
|
|
|
f ≈ |
|
(−0.02) + |
|
(0.01) = −0.004. |
|
|
|
|
|
|
|
|
|
5 |
5 |
|
|
|
|
|
|
|
= |
|
|||
Bei dieser einfachen Approximation liefert der Näherungswert c˜ |
5 |
0.004 |
4.996 also einen |
||||||||||
recht guten Näherungswert des tatsächlichen Werts |
c |
= |
4 |
.996048439 . . . |
. |
Ì |
|||||||
|
|
|
= |
− |
|
||||||||
Mithilfe des Di erenzials können einige Regeln der Di erenzialrechnung leicht hergeleitet werden. Besonders eindrucksvoll ist die Anwendung bei der sogenannten allgemeinen Kettenregel. Wir betrachten eine zusammengesetzte Funktion
g(t) = f (x(t), y(t)) .
Die beiden Funktionen x(t) und y(t) sind jeweils Funktionen von R nach R. Die Funktion f ist eine Funktion mit zwei Variablen und bildet von R2 nach R ab. Mithilfe des Di erenzials df = fx dx + fy dy folgt nach der Division durch dt
df |
|
dx |
dy |
||
|
= fx |
|
|
+ fy |
|
dt |
dt |
dt |
|||
und daraus unmittelbar
g′(t) = fx (x(t), y(t)) x′(t) + fy (x(t), y(t)) y′(t).
Man kann diese Formel sogar sehr elegant mittels des Skalarprodukts zwischen den partiellen Ableitungen fx und fy und den inneren Ableitungen x′ und y′ schreiben:
g′(t) = (fx, fy) Œ xy′′ ‘ .
Wenn das keine schöne Anwendung des Skalarprodukts ist!
Satz 10.3 (Allgemeine Kettenregel)
Die verkettete Funktion g(t) = f (x(t), y(t)) mit der Variablen t hat die Ableitung
g′(t) = fx (x(t), y(t)) x′(t) + fy (x(t), y(t)) y′(t).

404 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
10 Funktionen mit mehreren Variablen |
|
Beispiel 10.19 (Allgemeine Kettenregel) |
|
|
|||||||||||||||||||
Wir betrachten eine Ellipse in Parameterform |
|
||||||||||||||||||||
x t |
|
|
|
|
|
|
|
|
a cos t |
|
|
|
|
||||||||
Πy |
(t) ‘ = Œ |
|
b sin t ‘ |
|
|
|
|
||||||||||||||
mit den Halbmessern( ) |
|
a und b, siehe Definition 9.5. Der Abstand zum Ursprung |
|
||||||||||||||||||
|
» |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
r t |
x2 |
|
t |
|
y2 |
|
t |
|
|
|
|
||||||||||
ist von t(abhängig.) = (Nach) + |
der( )allgemeinen Kettenregel ist |
|
|||||||||||||||||||
r′(t) = |
|
|
|
|
|
x |
|
|
|
(−a sin t) + |
y |
(b cos t). |
|
||||||||
» |
|
|
|
|
|
» |
|
|
|||||||||||||
x2 |
|
|
y2 |
x2 y2 |
|
||||||||||||||||
Durch Einsetzen von x t |
|
und y t und nach Zusammenfassen der Terme erhalten wir |
|
||||||||||||||||||
|
|
|
|
|
|
|
|
+ |
|
|
|
|
|
|
|
|
|
+ |
|
|
|
r′ t |
|
|
|
b2 |
|
|
a2( )sin t cos( t) |
|
|
|
|
||||||||||
|
( |
a2 cos2 t |
|
b2 sin2 t . |
|
|
|
||||||||||||||
( ) = |
|
|
− |
|
) |
|
|
|
|
|
|
|
|
|
|
||||||
√ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
In diesem Beispiel wäre mit der Form |
|
|
|
||||||||||||||||||
r(t) = √ |
|
|
|
|
|
|
|
|
|
+ |
|
|
|
|
|
|
|
|
|||
a2 cos2 t + b2 sin2 t |
|
|
|
|
|
||||||||||||||||
auch die direkte Berechnung der Ableitung möglich gewesen. |
Ì |
||||||||||||||||||||
Betrachten wir nun eine Funktion y(x) in einer Variablen, allerdings in impliziter Form:
F (x, y(x)) = 0.
Ist die Ableitung y′(x) gesucht, so haben wir in Abschnitt 6.2.4 die Methode des impliziten Di erenzierens kennengelernt. Mit der allgemeinen Kettenregel können wir nun eine Formel dafür herleiten:
dF = Fx 1 + Fy y′. dx
Nun soll ja F konstant null sein, also ist auch die Ableitung dF überall null. Wir lösen dx
nach y′ auf und erhalten
y′(x) = −Fx(x, y(x)). Fy(x, y(x))
Implizite Di erenziation
Beim Ableiten einer impliziten Gleichung F (x, y) = 0 in den Variablen x und y nach x erhält man y′(x) mit der allgemeinen Kettenregel in der Form
y′(x) = −Fx(x, y(x)). Fy(x, y(x))