


5.5 Grenzwert und Stetigkeit |
197 |
Beispiel 5.46 (Allgemeine Kosinusfunktion)
a) |
Die allgemeine Kosinusfunktion |
|
|
|
|
|
|
|
f (t) |
|
|
|
|
|
|
|
||||||||||
|
|
|
f(t) = 3 cos ‹2 t + |
π |
• |
|
|
|
|
|
|
|
|
3 |
|
T = π |
|
|
|
|
|
|||||
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
hat die Amplitude A |
|
3 und die Periode T |
|
π. |
|
|
|
|
|
|
|
|
|||||||||||||
|
An der Stelle |
t0 |
|
π |
=liegt ein Hochpunkt. |
Nach |
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
6 |
|
= |
|
|
|
|
π |
2π |
3π |
|
|
t |
|||||||||||
|
einer |
halben |
Periode, |
also |
bei |
t |
π , hat |
die |
|
|
|
|
|
|
|
|
||||||||||
|
|
= − |
|
|
|
|
3 |
|
|
|
|
|
3 |
|
|
|
|
|
|
|
||||||
|
Funktion einen Tiefpunkt. Dazwischen, also bei |
|
|
|
|
π |
|
|
||||||||||||||||||
|
− |
f (t) = 3 cos |
2 t + |
|
|
|||||||||||||||||||||
|
|
|
π |
|
|
|
|
|
|
|
|
= |
|
|
|
|
|
3 |
¢ |
|
||||||
|
t |
|
12 , befindet sich eine Nullstelle. Die Koordi- |
|
|
|
¡ |
|
|
|
||||||||||||||||
|
naten aller charakteristischen Punkte lauten so- |
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
mit |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
N ‹ |
π |
k π |
0• |
|
|
π |
+ k π V 3• , T |
π |
+ k π V − 3• , k Z. |
|
|
|
|
|
|||||||||
b) |
|
|
12 + |
2 |
V |
, H ‹ − 6 |
‹ 3 |
|
|
|
|
|
||||||||||||||
Die Funktion |
|
2 |
|
5 π |
|
|
|
|
|
|
|
|
f (t) |
|
|
|
|
|
|
|
||||||
|
|
|
f(t) = −2 sin ‹ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
3 t − |
6 • |
|
|
|
|
|
|
|
|
2 |
|
T = 3 π |
|
|
|
||||||||
|
bringen wir mit der Beziehung |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
−sin x = cos ‹x + |
π |
|
|
|
|
|
|
|
|
|
|
|
π |
2π |
3π |
|
|
t |
|||||
|
|
|
2 •, |
|
|
|
|
|
|
|
|
−2 |
|
|
|
2 |
5 π |
|
||||||||
|
siehe Satz 5.10, in die Form einer allgemeinen |
f (t) = −2 sin ¡ |
3 t − 6 |
¢ |
||||||||||||||||||||||
|
Kosinusfunktion: |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
2 |
|
5 π |
π |
|
|
2 |
|
|
π |
•. |
|
|
|
|
|
|
|
|
|
|
|
|
f(t) = 2 cos ‹ 3 t − |
6 + |
2 • = 2 cos ‹ 3 t − |
3 |
|
|
|
|
|
|
|
|
||||||||||||
|
Aus dieser Form können wir die Amplitude A |
|
2, die Periode T |
|
3 π und die Verschiebung |
|||||||||||||||||||||
|
t0 |
|
π |
ablesen. Die Koordinaten aller |
Nullstellen N, Hochpunkte H und Tiefpunkte T sind |
|||||||||||||||||||||
|
|
|
= |
2 |
|
|
|
= |
|
|
= |
|
|
|
|
|
|
|||||||||
|
|
|
|
5 π |
3 k π |
|
|
π |
+ 3 k π V 2• , T ‹ 2 π + 3 k π V − 2• , k Z. |
|
|
|
Ì |
|||||||||||||
|
|
|
N ‹ |
4 + |
|
2 |
V 0• |
, H ‹ 2 |
|
|
|
|||||||||||||||
5.5 Grenzwert und Stetigkeit
In diesem Abschnitt beschäftigen wir uns mit Folgen von unendlich vielen Zahlen und deren Anwendungen auf Funktionen. Dabei ist der zentrale Begri der Grenzwert. Unter einem Grenzwert versteht man grob gesprochen eine Zahl, die Schritt für Schritt durch Folgenglieder immer besser angenähert wird. Viele wichtige mathematische Begri e, wie beispielsweise die Ableitung einer Funktion oder das Integral über eine Funktion, werden durch Grenzwerte definiert. Auf den ersten Blick scheint es bei Grenzwerten um ein rein theoretisches Thema zu gehen. Doch dieser Eindruck täuscht kolossal. Ingenieure verwenden Grenzwerte, um das Verhalten von Modellen zu verifizieren. Ein typischer Modelltest


5.5 Grenzwert und Stetigkeit |
201 |
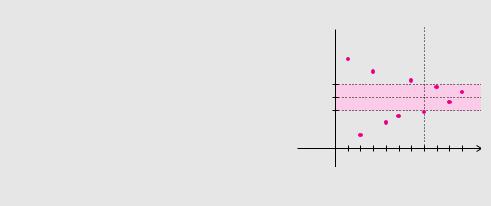
Anschaulich liegen bei einer konvergenten Folge alle Glieder über einem bestimmten Index n innerhalb einer sogenannten ε-Umgebung um den Grenzwert a. Außerhalb dieser ε- Umgebung dürfen also nur endlich viele Folgenglieder liegen.
Konvergenzuntersuchungen mithilfe dieser Definition erfordern bereits für einfache Beispiele einen langen Atem und sind für praktische Zwecke ungeeignet. Wir werden uns im Folgenden mit einem intuitiven Verständnis über das Konvergenzverhalten von Folgen begnügen. Weitere Einzelheiten zu formalen Konvergenzuntersuchungen findet man in [Heuser:Analysis].
In engem Zusammenhang mit Konvergenzuntersuchungen stehen die Begri e Monotonie und Beschränktheit, die wir bereits von Funktionen kennen.
Definition 5.34 (Monotone Zahlenfolge)
Man nennt eine Zahlenfolge (ak)
L |
monoton fallend, falls |
ak |
ak |
1, |
|
streng monoton fallend, falls |
ak |
≥ ak+1 |
, |
||
L |
monoton wachsend, falls |
ak |
> ak+1 |
, |
|
L |
streng monoton wachsend, falls |
|
< |
+ |
, |
L |
ak ≤ ak+1 |
||||
für alle natürlichen Zahlen k.
Eine Folge kann nach unten oder nach oben beschränkt sein. Tri t beides zu, so spricht man einfach von einer beschränkten Folge.
Definition 5.35 (Beschränkte Zahlenfolge)
Man nennt eine Zahlenfolge (ak) beschränkt, falls der Betrag aller Folgenglieder unterhalb einer festen Schranke C liegt:
SakS ≤ C für alle k N.
Eine monotone Folge muss noch lange nicht konvergent sein. Auch Beschränktheit reicht nicht aus, um Konvergenz zu garantieren. Beide Eigenschaften zusammen garantieren jedoch die Konvergenz einer Folge. So ist jede monoton wachsende und nach oben beschränkte Folge konvergent. Genauso ist jede monoton fallende und nach unten beschränkte Folge konvergent. Der folgende Satz hat Charme. Er ist kurz und prägnant und sein Inhalt ist dennoch weitreichend.
Satz 5.14 (Konvergenz monotoner und beschränkter Folgen)
Jede monotone und beschränkte Folge ist konvergent.
202 |
5 Funktionen |
Satz 5.14 stellt ein hinreichendes Kriterium für Konvergenz dar, aber kein notwendiges. Ein konvergente Folge ist zwar immer beschränkt, es gibt jedoch auch konvergente Folgen, die nicht monoton sind. Eine alternierende Folge etwa kann konvergent sein, ist aber per Definition nicht monoton.
Beispiel 5.51 (Rekursiv definierte, konvergente Zahlenfolge)
|
|
|
|
|
|
|
ak |
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Die rekursive Definition ak |
|
2−1 |
+ |
|
|
|
|
ergibt mit dem Anfangsglied a1 |
= |
2 die Folge |
|
|
||||||||||||||||||
|
ak |
|
|
1 |
|
|
||||||||||||||||||||||||
ak |
2, |
3 |
, |
17 |
, |
577= |
, . . . |
|
|
− |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
12 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
2 |
|
408 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Aus den( Zahlenwerten) = |
entnimmt man, dass die Folge monoton fallend und sicher nach unten |
|||||||||||||||||||||||||||||
beschränkt und somit konvergent ist. Der Grenzwert a muss die Gleichung a |
a |
|
1 |
erfüllen, |
||||||||||||||||||||||||||
|
2 |
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
|||
es kommen also nur die beiden Werte |
a |
|
|
|
|
2 |
|
in Betracht. Da wir zusätzlich |
noch wissen, dass |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
= |
|
|
+ |
|
|
|
|
||||||||||||||
alle unsere Folgenglieder positiv sind, sind |
wir sicher, dass die Folge gegen den Grenzwert a |
|
2 |
|||||||||||||||||||||||||||
|
√ |
|
|
|
|
|
|
|
|
|
|
= √Ì |
||||||||||||||||||
konvergiert. |
|
|
|
|
|
|
|
|
|
|
|
|
= ± |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Mit konvergenten Folgen darf man auf natürliche Art und Weise rechnen. Man darf die Rechenoperation und die Grenzwertbildung vertauschen.
Satz 5.15 (Rechnen mit konvergenten Folgen)
Wenn |
a |
k) |
und |
( |
b |
k) |
|
konvergente Folgen sind mit |
lim a |
|
|
= |
a und |
|
lim b |
k = |
b, dann |
||||||||||||||||||||||
gilt: |
( |
|
|
|
|
|
|
|
|
|
|
|
|
k→∞ |
|
|
|
k |
|
|
|
|
|
k→∞ |
|
||||||||||||||
L |
Die Folge ( |
c |
k) = ( |
a |
|
± |
b |
|
lim |
( |
a |
|
|
± |
b |
k) = |
a |
± |
b |
|
|
|
|||||||||||||||||
|
|
|
k |
|
|
k) konvergiert auch mit k→∞ |
|
|
k |
|
|
|
|
. |
|
|
|||||||||||||||||||||||
L |
Die Folge ( |
c |
k) = ( |
a |
|
|
b |
|
|
lim |
|
a |
k |
|
b |
k) = |
a |
|
b |
|
|
|
|
|
|||||||||||||||
|
|
|
k |
|
|
k) konvergiert auch mit k→∞ ( |
|
|
|
|
|
|
|
. |
|
|
|
|
|||||||||||||||||||||
L |
|
|
|
|
c |
|
|
|
|
|
ak |
|
|
|
|
lim |
|
ak |
|
|
|
|
|
|
|
a |
|
|
|
|
|
|
|
|
|
|
|
||
Die Folge ( |
|
k) = ‹ |
|
• konvergiert auch mit k→∞ ‹ |
|
• = |
|
|
|
|
. Das gilt nur, wenn alle |
||||||||||||||||||||||||||||
|
bk |
bk |
|
|
b |
||||||||||||||||||||||||||||||||||
Folgenglieder bk und der Grenzwert b nicht null sind.
Wenn alle Folgenglieder einer Folge zwischen den Folgengliedern von zwei konvergenten Folgen eingeschlossen sind, so muss auch der Grenzwert zwischen den beiden Grenzwerten eingeschlossen sein.
Satz 5.16 (Einschließungsprinzip) |
|
|
lim b |
|
|
|
|
|
||||
Wenn ( |
a |
k) und ( |
b |
lim a |
k = |
a |
k = |
b |
, und ( |
c |
k) |
|
|
|
k) konvergente Folgen sind mit k→∞ |
|
und k→∞ |
|
|
||||||
eine zwischen (ak) und (bk) eingeschlossene Folge ist mit ak ≤ ck ≤ bk, dann gilt:
L Wenn die Folge (ck) konvergiert, so liegt ihr Grenzwert zwischen den beiden Grenz-
werten a ≤ lim ck ≤ b.
k→∞
L Wenn (ak) und (bk) denselben Grenzwert a = b haben, dann konvergiert auch die
Folge (ck) gegen diesen gemeinsamen Grenzwert a = lim ck = b.
k→∞
5.5 Grenzwert und Stetigkeit |
203 |
Ein Grenzwert ist eine feste Zahl. Somit besitzen Folgen, die gegen ∞ oder −∞ gehen, streng genommen keinen Grenzwert. Bei solchen Folgen bezeichnet man ∞ und −∞ als uneigentliche Grenzwerte.
Definition 5.36 (Uneigentliche Grenzwerte)
Wenn die Glieder einer Folge jede noch so große Schranke ab einem bestimmten Index überschreiten und dann immer oberhalb dieser Schranke liegen, dann hat die Folge den uneigentlichen Grenzwert ∞. Entsprechend definiert man den uneigentlichen Grenzwert −∞. Folgen mit einem uneigentlichen Grenzwert bezeichnet man als bestimmt divergent und ansonsten als unbestimmt divergent.
Oftmals reicht die Erkenntnis nicht aus, dass eine Folge einen uneigentlichen Grenzwert besitzt. Man möchte wissen, wie schnell eine Folge gegen ±∞ strebt. Solche Aussagen sind mit dem sogenannten Landau-Symbol möglich.
Definition 5.37 (Landau-Symbol)
Man bezeichnet die Folge (bk) als eine asymptotische obere Schranke der Folge (ak), falls es eine Konstante C und eine natürliche Zahl n gibt, sodass
SakS ≤ C SbkS für alle k ≥ n,
und verwendet die Schreibweise mit dem Landau-Symbol ak O(bk).
Die Sprechweise ist „ak ist Element von groß O von bk“. Den Nachweis, dass die Folge
( |
bk |
) |
eine asymptotische obere Schranke für die Folge |
( |
ak |
) |
ist, kann man in vielen Fällen |
||||||||||||||
|
|
|
|
|
|
|
k |
|
bk |
|
|
|
|
|
|
|
|
||||
durch die Grenzwertbetrachtung |
lim |
ak |
|
C führen. Wenn es eine Konstante C 0 |
|||||||||||||||||
|
|
||||||||||||||||||||
gibt, verhalten sich die beiden |
Folgen asymptotisch ähnlich. Für C |
1 verhalten sich die |
|||||||||||||||||||
|
|
→∞ V |
|
V ≤ |
= |
|
|
|
|
|
=bk |
) |
> |
||||||||
beiden Folgen asymptotisch gleich und für C |
0 wächst die Folge |
schneller als die |
|||||||||||||||||||
Folge |
( |
ak |
) |
. |
|
|
|
|
|
|
|
|
|
|
( |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Beispiel 5.52 (Landau-Symbol)
a)Die Folge mit den Gliedern ak = 3 k2 − 5 k + 6 verhält sich asymptotisch ähnlich wie die Folge mit den Gliedern bk = k2, denn
|
3 |
k2 |
|
|
5 k |
|
6 |
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
klim |
|
|
−k2 |
|
+ |
|
W = |
klim |
|
|
3 |
|
|
|
|
|
|
|
V = |
3. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
k |
|
k2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
→∞ W |
|
|
|
|
|
|
|
|
|
|
|
→∞ V |
|
− + |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
Wir schreiben deshalb 3 k2 |
− |
5 k |
+ |
6 |
O( |
k2 |
) |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
√ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
b) Es gilt |
2 k4 |
|
− |
k3 |
+ |
4 k2 |
− |
3 k |
+ |
5 |
O( |
k2 |
) |
|
|
denn |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
√ |
|
|
|
|
|
|
|
|
|
|
|
|
R¾ |
|
|
|
|
|
|
|
|
|
|
R |
|
|
|
||||||||||||||||
klim |
|
|
|
|
|
|
k2 |
|
|
|
|
|
|
|
|
|
|
|
|
klim |
2 k |
|
k2 |
|
k3 |
|
k4 |
2. |
||||||||||||||||
|
|
|
|
|
|
|
− |
|
|
+ |
|
|
− |
|
|
|
+ |
|
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
R |
√ |
|
|
|||
|
|
|
|
|
4 |
|
|
3 |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
R |
|
|
|
|||||||
|
|
2 k |
|
|
|
k |
|
|
4 k |
|
|
|
3 k 5 |
|
|
|
|
R |
|
|
1 |
4 |
3 |
5 |
|
R |
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
R |
|
|
|
|
→∞ W |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
W = |
→∞ R |
|
|
− |
|
+ |
|
− |
|
+ |
|
R = |
Ì |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
R |
|
|
|
|