245
6 Di erenzialrechnung
Die Di erenzialrechnung beschäftigt sich mit dem Änderungsverhalten einer Funktion. Ausgehend von einem bestimmten Funktionswert kann man mit Mitteln der Di erenzialrechnung über den weiteren Verlauf einer Funktion spekulieren. Di erenzialrechnung könnte man böswillig als mathematische Wahrsagerei bezeichnen. Tatsächlich hat das Thema jedoch wenig mit Esoterik zu tun. Bei der Di erenzialrechnung konzentriert man sich auf kleine Änderungen. Bei kleinen Änderungen in der Variablen lässt sich die Veränderung der Funktion sehr zuverlässig prognostizieren.
Wenn man beispielsweise von einem Fahrzeug, das mit hoher Geschwindigkeit auf der Autobahn fährt, die aktuelle Position und Geschwindigkeit kennt, dann kann man recht zuverlässig berechnen, an welcher Position sich das Fahrzeug 0.1 Sekunden später befinden wird.
Die Di erenzialrechnung ist ein unverzichtbares Hilfsmittel bei der mathematischen Modellbildung. Dabei versucht man, die Wirklichkeit durch Funktionen zu beschreiben. Bei Di erenzialgleichungen in Kapitel 12 werden wir das Thema Modellbildung noch genauer beleuchten.
6.1 Steigung und Ableitungsfunktion
Bei der Ableitung einer Funktion gibt es einen lokalen und einen globalen Aspekt. Der lokale Aspekt beschäftigt sich mit dem Steigungsverhalten der Funktion an einer bestimmten Stelle. Der globale Aspekt stellt den Zusammenhang zwischen der Funktion und ihrer Ableitungsfunktion her. Beide Aspekte werden in diesem Abschnitt betrachtet.
6.1.1 Tangente und Di erenzierbarkeit
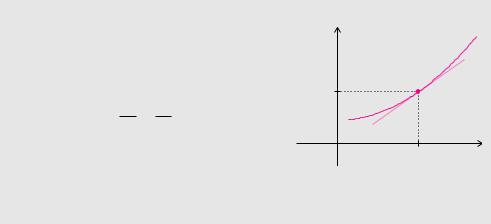
Lokal kann man eine Funktion durch eine Gerade annähern. Dazu greift man zwei Punkte auf dem Schaubild der Funktion heraus und verbindet diese Punkte durch eine Gerade. Diese Gerade, die sogenannte Sekante, hat eine konstante Steigung. Die Steigung der Sekante wird als Di erenzenquotient bezeichnet und lässt sich mithilfe des Steigungsdreiecks ermitteln.

6.1 Steigung und Ableitungsfunktion |
247 |
Die Schreibweise für Ableitungen als Quotient der infinitesimal kleinen Größen df und dx geht auf Gottfried Wilhelm Leibniz zurück. Der große Vorteil dieser Di erenzialschreibweise liegt darin, dass man mit Di erenzialen formal rechnen darf wie mit anderen Variablen. Im Folgenden werden wir einige Rechenregeln und mathematische Eigenschaften auf einfache Weise mittels Di erenzialen herleiten. In Kapitel 7 werden wir genau diese Di erenzialschreibweise bei Integralen wieder antre en.
Etwa zeitgleich entwickelte Isaac Newton in England ebenfalls moderne Di erenzialrechnung. Auf ihn geht die heute hauptsächlich für die Ableitung nach der Zeit verwendete Notation f˙ zurück.
Einige Jahrzehnte später, Ende des 18. Jahrhunderts, führte Joseph-Louis Lagrange die heute weit verbreitete Standardschreibweise f′ ein.
Den Buchstaben D in Definition 6.2 bezeichnet man als Di erenzialoperator. Diese Operatorschreibweise wird gerne von Mathematikern verwendet und ist auch bei Computeralgebrasystemen üblich. Augustin-Louis Cauchy benutzte vorzugsweise die Operatorschreibweise Df.
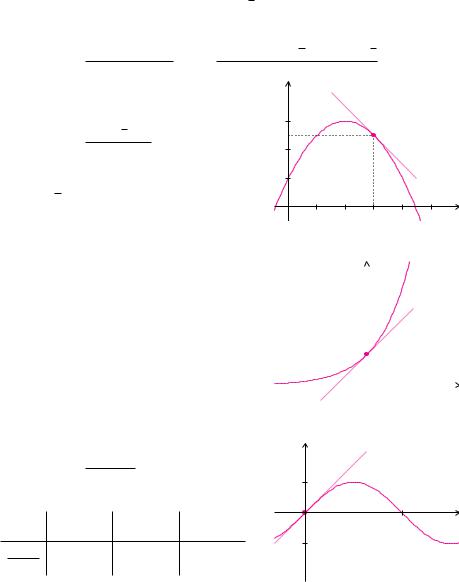
Die Gerade, die beim Grenzübergang aus der Sekante entsteht, bezeichnet man als Tangente.
Definition 6.3 (Tangente, Di erenzialquotient) |
|
|
||||
Eine Tangente einer Funktion f ist eine Ge- |
y |
f(x) |
||||
rade durch einen Punkt des Schaubildes von f. |
|
|||||
|
|
|||||
Die Tangente berührt das Schaubild von f. Der |
|
g(x) |
||||
Grenzwert des Di erenzenquotienten |
|
|||||
f(x0) |
|
|||||
|
′( |
|
|
df |
|
|
f |
x |
lim f |
|
|
||
|
0) = |
x→0 x = |
dx Vx0 |
|
|
|
beschreibt die Steigung der Tangente |
x0 |
x |
||||
g(x) = f(x0) + f′(x0)(x − x0)
und wird als Di erenzialquotient bezeichnet.
Funktionswert und Steigung von Funktion und Tangente stimmen also überein. Ganz allgemein spricht man bei Schaubildern von Funktionen, die an einer Stelle x0 denselben Funktionswert und dieselbe Steigung haben, von sich berührenden Funktionen. Dabei handelt es sich jedoch um einen lokalen Sachverhalt. Eine Tangente berührt das Schaubild der Funktion an der Stelle x0. Es ist aber nicht gesagt, dass diese Tangente das Schaubild der Funktion nicht noch an anderen Stellen schneidet.