


582 |
|
|
|
|
|
|
|
|
|
15 Fourier-Transformation |
|||||||||
2 |
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
ˆ |
|
|
|
|
|
|
|
|
sˆ(t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
S(t) |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
−3 −2 −1 |
|
|
1 |
2 |
3 |
t |
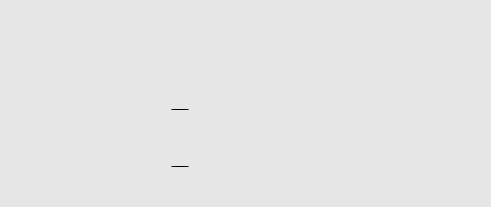
c s |
−3 −2 −1 |
|
|
|
1 |
2 |
3 |
f |
||||
( |
) = |
|
( |
2 t |
) |
|
|
ˆ |
( |
|
) = |
sin |
( |
π f |
) |
|
|
Ì |
|
s |
|
|
S |
f |
|
|
|
|
|||||||||||
sˆ t |
|
|
|
|
|
|
|
|
π f |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Mit den Begri en der Nachrichtentechnik könnte man diesen Sachverhalt auch folgendermaßen formulieren: Die Zeitdauer eines Signals und die Bandbreite des Spektrums stehen in einem reziproken Verhältnis. Ein wichtiger Spezialfall der Ähnlichkeit ist die Zeitumkehr.
Satz 15.9 (Zeitumkehr) |
s(t) |
c |
s |
S(f) |
||
Die Zeitumkehr entspricht der Frequenzumkehr. |
||||||
|
|
× |
|
|
|
× |
|
s |
× |
|
|
S |
× |
|
×t |
|
|
×f . |
||
|
|
Ö |
c |
s |
|
Ö |
|
|
(− ) |
|
(− ) |
||
15.3 Inverse Fourier-Transformation
Bei der Fourier-Transformation wird einer Zeitfunktion s eine Frequenzfunktion S zugeordnet. Nun stellt sich natürlich die Frage, ob wir nicht auch umgekehrt aus einer Frequenzfunktion S wieder die ursprüngliche Zeitfunktion s rekonstruieren können. Diese umgekehrte Transformation bezeichnet man als inverse Fourier-Transformation.
15.3.1 Definition
Die Formeln zur Berechnung der Fourier-Transformation und zur Berechnung der inversen Fourier-Transformation haben dieselbe Struktur. Sie unterscheiden sich durch das Vorzeichen in der Exponentialfunktion. Außerdem sind natürlich die Rollen der Zeitvariablen t und der Frequenzvariablen f vertauscht.
Definition 15.4 (Inverse Fourier-Transformation)
Die inverse Fourier-Transformation ordnet einer Funktion S im Frequenzbereich eine Zeitfunktion s zu. Die inverse Fourier-Transformation von S ist definiert durch
S |
|
f |
|
|
|
|
s t |
∞ S |
|
f |
|
ei 2 π f tdf. |
|
( |
) |
s c |
( |
) |
|||||||||
|
|
( |
) = S−∞ |
|
|
||||||||
Dabei wird das Korrespondenzsymbol s cverwendet.

15.3 Inverse Fourier-Transformation |
583 |
Die inverse Fourier-Transformation ist genau auf die Fourier-Transformation abgestimmt. Mit anderen Worten: Wenn wir eine Funktion mit der Fourier-Transformation in den Frequenzbereich transformieren und anschließend mit der inversen Fourier-Transformation wieder zurück in den Zeitbereich transformieren, dann ergibt sich die Ausgangsfunktion.
Satz 15.10 (Fourier-Transformationspaar)
Die Zeitfunktion s und die Frequenzfunktion S bilden ein Fourier-Transformationspaar. Wenn S die Fourier-Transformierte von s ist, dann ist s die inverse Fourier-Transfor- mierte von S und umgekehrt.
Durch diese Transformationseigenschaft ist sichergestellt, dass bei der Fourier-Transfor- mation keine Information verloren geht. Die Zeitfunktion lässt sich mittels der inversen Fourier-Transformation vollständig aus der zugeordneten Frequenzfunktion rekonstruieren. Der Beweis dieser Transformationseigenschaft ist nicht trivial. Dem interessierten Leser möchten wir an dieser Stelle die wesentlichen Ideen aufzeigen, aus denen sich der Zusammenhang der beiden Transformationen ergibt. Wenn wir davon ausgehen, dass S die Fourier-Transformierte von s ist, dann gilt nach Definition 15.1
∞
S(f) = S−∞ s(τ) e−i 2 π f τ dτ.
Um Namenskonflikte zu vermeiden, verwenden wir hier die Integrationsvariable τ. Nun müssen wir zeigen, dass umgekehrt s die inverse Fourier-Transformierte von S ist. Die inverse Fourier-Transformierte von S können wir mit der Formel aus Definition 15.4 berechnen:
S f |
s |
c |
|
∞ S f |
ei 2 π f t df . |
|
|
||||||||
Setzt man( |
)die erste Beziehung−∞ ( |
)in die zweite ein, so entsteht |
|||||||||||||
|
|
|
|
|
|
S |
∞ ∞ s τ |
|
|
|
|
||||
S |
|
f |
|
|
|
|
e |
i 2 π f τ dτ |
|
ei 2 π f t df. |
|||||
( |
) s |
c |
|
• |
|||||||||||
|
|
S |
−∞ ‹ |
S |
−∞ |
( |
) |
− |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Wir fassen die Exponentialfunktionen zusammen und vertauschen die Reihenfolge der Integration:
S |
|
f |
|
|
|
|
|
∞ ∞ s τ |
|
ei 2 π f |
t |
|
τ |
|
df |
|
dτ. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
( |
) |
s |
|
c |
) |
− |
) |
• |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
−∞ ‹ |
|
|
−∞ |
( |
|
|
( |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
Die Funktion |
s τ |
|
|
bezüglich der Integration nach f konstant und kann deshalb vor |
||||||||||||||||||||||||||||||||||||
|
|
|
|
istS |
S |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
das innere |
Integral geschrieben werden: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
( |
) |
∞ s |
|
|
|
|
∞ ei 2 π f (t−τ) df |
|
dτ |
∞ s |
|
|
|
|
|
|
|
|
|
dτ |
|
|
|
|
|
||||||||||||||
S |
|
f |
|
|
|
|
|
|
τ |
|
|
|
τ |
|
δ |
|
t |
|
τ |
|
|
s |
t |
|
. |
|||||||||||||||
( |
) |
s |
|
c |
( |
|
• |
( |
) |
( |
− |
) |
= |
) |
||||||||||||||||||||||||||
|
|
|
S−∞ |
|
|
) ‹S−∞ |
δ t τ |
|
|
|
|
|
|
= S−∞ |
|
|
|
|
|
|
( |
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
´¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¸¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¶ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
( − |
|
) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Bei der letzten Umformung haben wir die Ausblendeigenschaft der Dirac-Distribution aus Satz 14.3 verwendet. Die wesentliche Beziehung für unseren Nachweis besteht aus
∞
δ(t − τ) = S−∞ ei 2 π f (t−τ) df .

15.4 Di erenziation, Integration und Faltung |
585 |
15.3.3 Linearität
Die inverse Fourier-Transformation ist wie die Fourier-Transformation selbst linear. Wenn wir also Frequenzfunktionen überlagern oder mit konstanten Faktoren skalieren, dann erhalten wir im Zeitbereich die entsprechenden überlagerten oder skalierten Zeitfunktionen.
Satz 15.12 (Linearität der inversen Fourier-Transformation)
Die Addition von Funktionen im Frequenzbereich entspricht einer Addition der zugehörigen inversen Fourier-Transformierten im Zeitbereich. Die Multiplikation mit einem konstanten Faktor im Frequenzbereich entspricht einer Multiplikation mit demselben Faktor im Zeitbereich.
S1(f), S2(f) |
|
s |
c |
s1(t), s2(t) |
|
||||||
|
|
|
× |
|
|
|
|
|
|
× |
|
C1 S1 |
f |
× |
|
|
|
|
C1 s1 |
t |
× |
|
|
×C2 S2 f |
|
|
×C2 s2 t |
||||||||
|
|
|
Ö |
|
|
s |
c |
|
|
Ö |
( ) |
C |
|
und C beliebige Konstanten. |
|
||||||||
Dabei sind ( |
|
1) + |
2 |
( ) |
|
|
|
( ) + |
|||
15.4 Di erenziation, Integration und Faltung
Wir klären nun, wie sich das Ableiten und Integrieren einer Funktion auf die Fourier-Trans- formation auswirkt. Dabei werden wir ein verblü endes Ergebnis erhalten. Di erenziation bzw. Integration im Zeitbereich bewirkt im Frequenzbereich lediglich eine Multiplikation oder Division. Somit können wir durch die Fourier-Transformation das Ableiten oder Integrieren einer Funktion umgehen.
15.4.1 Di erenziation im Zeitbereich
Nach Definition 15.4 können wir eine Zeitfunktion s als inverse Fourier-Transformierte von S darstellen:
s |
t |
) = |
|
∞ S |
( |
f |
) |
ei 2 π f t df. |
|
|
|
|
|
|
|
|
|
|
||||
|
( |
−∞ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Die AbleitungSnach t ergibt die Beziehung |
|
|
|
|
|
|
|
|
|
|||||||||||||
s˙ |
t |
|
d |
|
|
∞ S |
|
f |
|
ei 2 π f t df |
|
∞ |
i 2 π f |
|
S |
|
f |
|
ei 2 π f t df. |
|||
) = dt |
|
( |
) |
= |
) |
( |
) |
|||||||||||||||
|
( |
−∞ |
|
|
|
−∞ ( |
|
|
|
|
||||||||||||
Dabei gehen wir Sstillschweigend davon aus,S |
dass wir die Reihenfolge von Ableitung und |
|||||||||||||||||||||
Integration an dieser Stelle vertauschen dürfen. Interpretiert man diese Beziehung geeignet, so besagt sie, dass die inverse Fourier-Transformation von (i 2 π f)S(f) gerade s˙(t) ergibt.
