16.2 Eigenschaften |
605 |
16.2 Eigenschaften
In diesem Abschnitt analysieren wir die Eigenschaften der Laplace-Transformation. Die Rechenregeln der Laplace-Transformation ersparen uns viel Arbeit. Letztendlich genügt es, die Laplace-Transformation von ein paar wichtigen Funktionen zu kennen. Diese Korrespondenzen sind in Tabellen, siehe etwa Anhang A.8, festgehalten. Die Laplace-Trans- formationen weiterer Funktionen versuchen wir dann, auf die tabellierten Korrespondenzen zurückzuführen.
Die Rechenregeln der Laplace-Transformation sind alle ähnlich aufgebaut. Sie besagen, wie sich Veränderungen an der Zeitfunktion auf die Funktion im Bildbereich auswirken, oder umgekehrt, wie sich Veränderungen der Funktion im Bildbereich auf die Zeitfunktion auswirken. Die Rechenregeln erlauben also Rückschlüsse zwischen Zeitbereich und Bildbereich.
16.2.1 Linearität
Integrale sind linear. Konstante Faktoren darf man aus dem Integral herausziehen, siehe Satz 7.4. Die Integration der Summe zweier Funktionen ergibt dasselbe wie die Summe der beiden einzelnen Integrale, siehe Satz 7.5. Diese beiden Eigenschaften übertragen sich direkt auf jede Integraltransformation, also auch auf die Laplace-Transformation.
Satz 16.1 (Linearität)
Die Addition von Funktionen im Zeitbereich entspricht der Addition der entsprechenden Laplace-Transformierten im Bildbereich. Die Multiplikation mit einem konstanten Fak-
tor im Zeitbereich entspricht der Multiplikation mit demselben Faktor im Bildbereich. |
||||||||||||||||
f1 |
t |
, f2 |
t |
|
c s |
F1 |
s , F2 |
|
s |
|
|
|||||
|
|
( ) |
|
( |
) |
|
|
|
|
|
( ) |
( |
|
) |
|
|
|
|
|
× |
|
|
|
|
|
|
|
× |
|
|
|
|
|
C1 f1 |
|
t |
× |
|
|
|
|
|
C1 F1 |
|
× |
|
|
|
|
|
|
×C2 f2 t |
|
|
|
|
s ×C2 F2 s |
||||||||||
|
|
|
Ö |
|
|
c |
s |
|
|
Ö |
|
|
|
( ) |
||
Dabei sind C und C beliebige Konstanten. |
|
|
|
|||||||||||||
|
( )1 + |
|
2( ) |
|
|
|
|
( ) + |
|
|
|
|||||
Beispiel 16.4 (Linearität)
Aus Beispiel 16.1 kennen wir die Laplace-Transformation der Zeitfunktion tn für beliebige natürliche Hochzahlen n. Aufgrund der Linearität ergibt sich daraus:
t |
n |
c |
s |
n! |
Ô |
tn |
c |
s |
1 |
, Re(s) > 0. |
|
|
sn+1 |
n! |
|
sn+1 |
|||||||
Dabei haben wir die Funktionen im Zeitbereich und im Bildbereich durch den selben konstanten Faktor n! geteilt. Ì

16.2 Eigenschaften |
607 |
Die Forderung a > 0 ist bei der Laplace-Transformation keine wirkliche Einschränkung, denn die Laplace-Transformation ist eine einseitige Transformation. Ein Funktionsteil für negative t-Werte wird nicht berücksichtigt.
Beispiel 16.6 (Ähnlichkeitssatz) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Aus Beispiel 16.5 kennen wir die Laplace-Transformierte des Kosinus: |
|
|
||||||||||||||||||||||||||
f(t) = cos t |
c |
s F (s) = |
s |
|
, |
Re(s) > 0. |
|
|
|
|
|
|
|
|||||||||||||||
s2 |
1 |
|
|
|
|
|
|
|
||||||||||||||||||||
Mit dem Ähnlichkeitssatz lässt sich |
daraus die Laplace-Transformierte der Funktion |
|||||||||||||||||||||||||||
|
|
+ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
f ω t cos |
|
|
|
|
1 |
|
|
|
s |
1 |
|
|
|
s |
|
|
|
|
|
s |
|
|
|
Re s 0 |
||||
ω t |
|
|
F |
|
|
|
|
ω |
|
|
|
|
|
|
, |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
s2 |
|
|
|
|
|
2 |
|
|
2 |
||||||||
( ) = |
( ) c s |
ω |
‹ ω • = |
|
ω |
+ |
1 = s |
+ |
ω |
|
( ) > |
|
||||||||||||||||
|
ω2 |
|
|
|
|
|||||||||||||||||||||||
berechnen. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ì |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
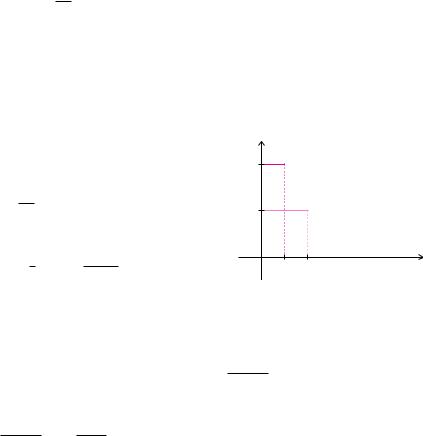
Beispiel 16.7 (Laplace-Transformation der Rechteckfunktion und Dirac-Distribution)
a) |
Die Laplace-Transformierte der Rechteckfunkti- |
|
|
|
¢ |
|||||||||
|
on r aus dem Schaubild berechnen wir mit der |
1 |
1 |
t |
||||||||||
|
Formel aus Definition 16.1: |
|
ε |
ε r¡ |
ε |
|||||||||
|
r(t) c s |
|
R(s) = |
|
1 |
|
|
|
|
|||||
|
|
0 |
1 e−s t dt. |
1 |
|
r(t) |
||||||||
|
Es ergibt sich: |
|
|
|
|
S |
|
|
|
|
|
|||
|
R |
( |
s |
1 e |
− |
s t |
1 |
1 |
e−s . |
ε |
1 |
|
t |
|
|
|
|
) = −s |
|
V0 = |
|
−s |
|
|
|
|
|
||
b)Zur Bestimmung der Laplace-Transformation der Dirac-Distribution δ verwenden wir die Darstellung der Dirac-Distribution als Grenzwert aus Definition 14.3. Aufgrund der Ähnlichkeit, siehe Satz 16.2, und der Linearität gilt
δ |
t |
|
lim |
1 |
r |
|
t |
|
|
|
|
lim |
1 |
ε R |
|
ε s |
|
lim |
1 |
e−s ε |
|
1. |
|
|
|
|
|
c s |
|
|
|
||||||||||||||
|
( |
) = |
ε→0 ε |
‹ |
ε |
• |
ε→0 ε |
( |
|
) = |
ε→0 |
−ε s |
= |
|
||||||||
Der Grenzwert wird mit der Regel von Bernoulli-de l’Hospital aus Satz 6.11 bestimmt:
lim |
1 |
e−s ε |
|
lim |
s e−s ε |
|
1. |
|
|
|
|
|
|||||
|
−ε s |
= |
|
= |
|
|||
ε→0 |
ε→0 s |
|
Ì |
|||||
Dabei haben wir im Zähler und im Nenner nach der Variablen ε di erenziert. |
||||||||
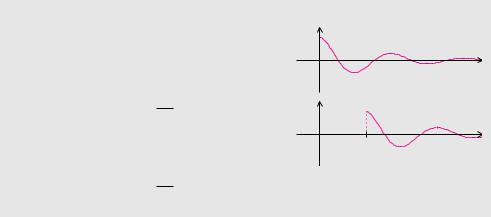
16.2.3 Zeitverschiebung
Die meisten Systeme benötigen eine gewisse Zeit, bis sich veränderte Eingaben am Ausgang bemerkbar machen. Die Zeitspanne zwischen Anforderung am Systemeingang und Antwort am Systemausgang bezeichnet man in der Regelungstechnik als Totzeit. Der Zeitverschiebungssatz beantwortet die Frage, wie sich solche Totzeiten auf die LaplaceTransformation auswirken.
608 |
16 Laplace-Transformation |
Beim Verschieben von Zeitfunktionen muss man bei der Laplace-Transformation sehr sorgfältig vorgehen. Funktionswerte für negative Zeiten werden durch die Integration, die erst bei t = 0 startet, ausgeblendet. Wenn wir eine Funktion um den Wert t0 > 0 nach rechts verschieben, dann müssen wir diejenigen Funktionswerte, die kleiner als t0 sind, ausblenden. Dies geschieht durch Multiplikation mit der Heaviside-Funktion, siehe
Definition 14.1.
Satz 16.3 (Zeitverschiebungssatz) |
|
|
|
|
|
||||||||||||||
Die Verschiebung der Funktion f im Zeitbereich |
|
|
|||||||||||||||||
um t0 |
|
|
0 nach rechts entspricht der Multipli- |
|
f(t) |
||||||||||||||
kation > |
|
|
|
|
|
|
|
|
|
|
|
|
|
− |
|
|
t |
||
der Laplace-Transformierten F mit e |
|
t0 s |
|
|
|||||||||||||||
im Bildbereich. |
|
|
|
|
|
c |
s |
|
F (s) |
|
|
|
|
||||||
|
|
|
|
|
f(t) |
|
|
|
|
|
|
|
|
σ(t−t0)f(t−t0) |
|||||
|
|
|
|
|
× |
|
|
|
|
|
|
|
|
× |
|
|
|
t0 |
t |
|
|
|
|
|
× |
|
|
|
|
|
|
|
|
× |
|
|
|
|
|
|
|
|
|
|
× |
|
|
|
|
|
|
|
|
× |
|
|
|
|
|
σ |
( |
t |
− |
t |
Öf |
( |
t |
− |
t |
0) |
c |
s |
e− |
t0 sÖF |
s |
|
|
|
|
|
|
|
0) |
|
|
|
( ) |
|
|
|
|||||||||
Satz 16.3 lässt sich aus Definition 16.1 herleiten. Dabei ist zu berücksichtigen, dass eine um t0 0 nach rechts verschobene Funktion im Bereich zwischen 0 und t0 null ist. Mithilfe
der Substitution u |
t |
|
t |
0 |
und du |
dt ergibt sich |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
> |
|
|
|
|
|
|
= |
− |
|
|
∞ f t |
= t0 |
|
e |
− |
s t dt |
|
|
|
∞ f u e |
− |
s |
( |
u |
+ |
t0 |
) |
du. |
|||||||||
f t t0 |
|
|
|
|
|
|
|
|
0 |
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
( − ) |
c |
|
s |
|
|
t0 |
( − ) |
|
|
|
|
= |
|
|
( ) |
|
|
|
|
|||||||||||||||||
|
s t0 |
|
|
S |
|
|
|
|
|
|
S |
|
|
|
|
|
|
|
|
|
|||||||||||||||||
Da der Faktor e− |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
u |
abhängt, können wir diesen |
|||||||||||||||||
|
|
|
nicht von der Integrationsvariable |
|
|
||||||||||||||||||||||||||||||||
Faktor vor das Integral ziehen: |
∞ f |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
f |
|
t |
|
t0 |
|
|
|
|
|
|
e |
|
s t0 |
|
u e |
|
s u du |
|
e |
s t0 F |
|
s |
|
. |
|
|
|
|
|||||||||
( |
− |
) |
c s |
|
− |
|
− |
= |
( |
) |
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
S0 |
|
( ) |
|
|
|
|
− |
|
|
|
|
|
|
|
|
|
|||||||||||||||
Bisher haben wir nur Zeitverschiebungen mit t0 > 0 nach rechts betrachtet. Aus theoretischer Sicht kann man auch Formeln für Zeitverschiebungen mit t0 < 0 herleiten. Diese Formeln sind jedoch für praktische Problemstellungen kaum von Bedeutung.
16.2.4 Dämpfung
Multipliziert man eine Funktion f mit dem Faktor e−s0 t, dann bezeichnet man die neue Funktion e−s0 t f(t) als gedämpfte Funktion. Typische Beispiele sind gedämpfte harmonische Schwingungen, wie sie bei der Lösung von Schwingungsdi erenzialgleichungen vorkommen, siehe Abschnitt 12.4.
Der Dämpfungssatz gibt Auskunft darüber, welche Laplace-Transformierte gedämpfte Funktionen besitzen. Die Herleitung erfolgt analog zum Zeitverschiebungssatz, auf Einzelheiten verzichten wir.