

 r
r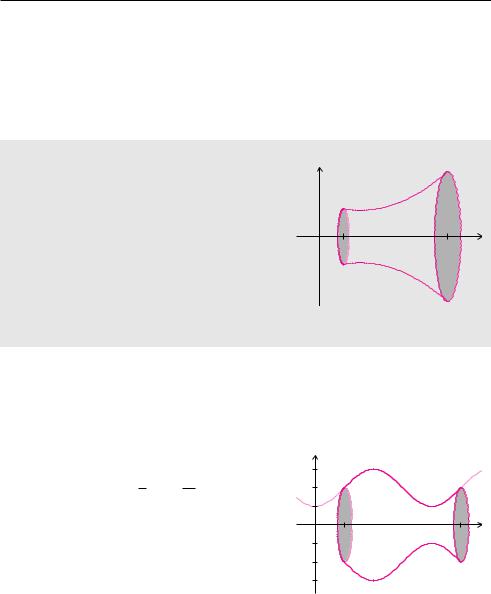
330 7 Integralrechnung
Für das Volumen Vx des Rotationskörpers erhalten wir somit die Näherungsformel
n
Vx ≈ π f12 x + π f22 x + . . . + π fn2 x = π Q fk2 x.
k=1
Aus dieser Näherungsformel ergibt sich beim Grenzübergang für n gegen unendlich die gesuchte Formel.
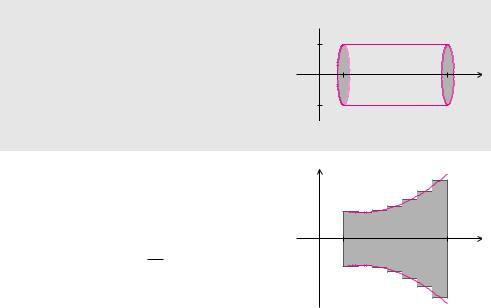
Satz 7.17 (Volumen bei Rotation um die x-Achse)
Durch Rotation des Schaubildes einer stetigen |
y |
|
|
|
Funktion f für x-Werte zwischen a und b um |
|
f(x) |
|
|
die x-Achse entsteht ein Rotationskörper. Das |
|
|
|
|
Volumen dieses Rotationskörpers kann man |
|
|
|
|
mit der Formel |
|
a |
b |
x |
|
|
|||
Vx = π Sa |
b |
|
||
|
|
|
||
f(x)2 dx |
|
|
|
|
berechnen. Dabei darf das Schaubild der Funktion f die x-Achse nicht schneiden, sondern höchstens berühren.
Die Formel für das Volumen einer Rotationsfläche kann man sich einfach merken. Eine Rotationsfläche besteht aus lauter Kreisscheiben. Jede Kreisscheibe hat die Fläche π r2, wobei der Radius r bei einer Rotationsfläche durch den Funktionswert gegeben ist. Das Aufsummieren erfolgt durch das Integral.
Beispiel 7.33 (Volumen bei Rotation um die x-Achse)
Durch Rotation des Schaubildes der Funktion |
y |
|
|
f (x) = 2 − cos x |
|||||||||||
f(x) = 2 − cos x, |
π |
|
5π |
3 |
|
|
|||||||||
|
1 |
|
|
|
|
|
|||||||||
2 ≤ x ≤ 2 |
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
um die x-Achse entsteht ein amphorenähnlicher Ro- |
|
|
|
|
|
|
|||||||||
tationskörper. Das Volumen dieses Körpers berechnet |
|
1 |
π |
5 |
π |
x |
|||||||||
sich mit der Formel |
|
|
|
|
|
|
−1 |
2 |
|
2 |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
52 |
|
|
|
|
|
|
− |
|
|
|
|
|
|
= |
|
π |
( |
2 |
− |
cos x |
) |
2 dx. |
2 |
|
|
|
|
|
Vx |
π |
π |
3 |
|
|
|
|
|
|||||||
|
|
S2 |
|
|
|
− |
|
|
|
|
|
||||
Zur Berechnung des Integrals multiplizieren wir die Klammer aus und berechnen die Teilintegrale einzeln:
|
= |
|
S |
5π |
− |
|
S |
5π |
+ |
|
S |
5π |
Vx |
π |
2 4 dx |
4 π |
2 cos x dx |
π |
2 cos2 x dx. |
||||||
|
|
2 |
|
2 |
|
2 |
||||||
|
|
|
|
π |
|
|
|
π |
|
|
|
π |
|
|
|
´¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¸¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¶ |
|
|
´¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¸¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¶ |
|
|
´¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¸¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¶ |
|||
|
|
|
|
V1 |
|
|
|
V2 |
|
|
|
V3 |

332 |
7 Integralrechnung |
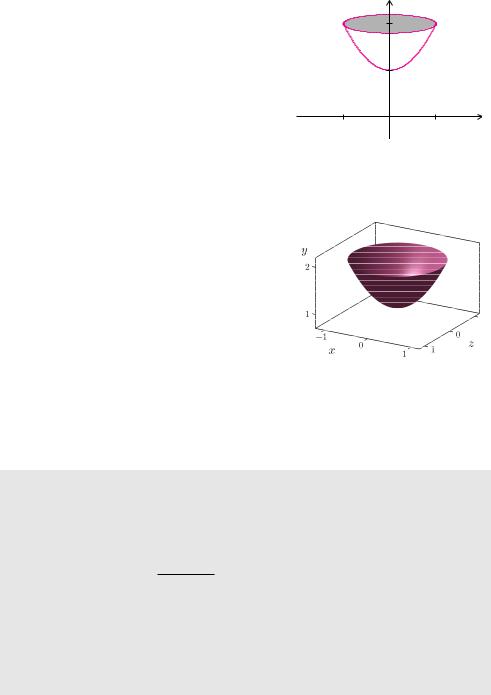
Beispiel 7.34 (Volumen bei Rotation um die y-Achse)
Das Schaubild der um 1 in Richtung der positiven |
y |
|
|
||||||||
y-Achse verschobenen Normalparabel |
2 |
|
|
||||||||
f x |
|
x2 1 |
|
|
|
|
|
|
|
|
|
mit x-Werten( ) =zwischen+ |
0 und 1 wird um die y-Achse |
1 |
f (x) = x2 + 1 |
||||||||
rotiert. Das Volumen können wir mit folgender For- |
|
|
|
||||||||
mel berechnen: |
|
|
|
|
|
|
|
|
|||
Vy |
= |
π |
f(b) |
f |
− |
1 x |
2 dx. |
−1 |
1 |
x |
|
|
|
Sf(a) |
‰ |
|
( )Ž |
|
|
|
|||
Dazu benötigen wir die Funktionsgleichung der Umkehrfunktion f−1. Diese bestimmen wir durch Auflösen der Funktionsgleichung von f nach y:
|
|
|
|
|
|
x2 |
|
1 |
|
|
|
|
|
|
|
x2 |
|
|
|
|
|
|
1 |
|
|
|
|
|
|
» |
|
|
|
. |
|
|
|
|
|
|
|
|
|
y |
= |
+ |
|
|
|
|
|
= |
y |
− |
|
|
x |
y |
− |
1 |
|
|
|
|
|
||||||||||||||||
Wir |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
|
|
|
|
|
|
|
|
|||||||||||||||
|
vertauschen die Variablen x und y und erhal- |
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
|
( |
) = |
√ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
( |
|
) = |
|
|
|
|
|
|
|
|
|
|
|
||||
ten f−1 |
x |
− |
1. Mit den Grenzen f |
a |
1 und |
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
f b |
|
2 ergibt sich |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
( ) = |
|
Vy = π |
|
2 |
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
1 2 Š√x − 1• dx |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
= |
π |
S |
x |
− |
1 |
) |
dx |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
Sx2 |
( |
|
|
|
π |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= π Œ |
|
− x‘W1 = |
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
2 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
Alternativ dazu können wir die Lösung auch mit der Formel |
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
1 |
|
x2 Tf′(x)T dx = π S0 |
1 |
|
|
|
|
|
|
|
1 |
x |
4 |
1 |
π |
||||||||||||||||
|
|
|
Vy = π S0 |
|
|
|
x2 |
S2 xS dx = π S0 2 x3 dx = π |
|
W0 = |
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
2 |
2 |
|||||||||||||||||||||||||||||||||
berechnen. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ì |
||||||
Satz 7.19 (Mantelfläche)
Durch Rotation des Schaubildes einer di erenzierbaren Funktion f für x-Werte zwischen a und b um
L die x-Achse entsteht ein Rotationskörper mit Mantelfläche
b »
Mx = 2 π S f(x) 1 + f′(x)2 dx.
a
L die y-Achse entsteht ein Rotationskörper mit Mantelfläche
My |
|
2 π |
|
f fa(b) f |
1 |
x ½ |
|
|
|
|
|
|
|
|
|
|
. |
= |
WS |
1 |
+ ( |
f |
1 |
( |
x |
))′ |
2 dx |
W |
|||||||
|
|
( ) |
− |
( ) |
|
|
− |
|
|
|
|
||||||