


260 |
6 Di erenzialrechnung |
f)Die Ableitung des Sinus Hyperbolicus f(x) = sinh x berechnen wir mithilfe der Faktor-, Summenund Kettenregel, denn
f |
|
x |
sinh x |
|
|
ex |
|
e−x ′ |
ex |
|
e−x |
1 |
|
ex |
e−x |
|
cosh x. |
|
′ |
( ) = ( |
|
)′ |
= Π|
|
−2 |
‘ = |
|
− |
2 |
(− ) |
= |
|
+2 |
= |
|
g) Entsprechend ergibt sich die Ableitung des Kosinus Hyperbolicus zu
f |
|
x |
cosh x |
|
ex |
+2 |
− |
|
′ |
ex |
+ |
e |
− |
|
(− |
1 |
) |
|
ex |
−2 |
e |
− |
|
sinh x. |
|
|
|
e |
x |
|
x |
|
|
x |
|
||||||||||||||||
|
′ |
( ) = ( |
|
)′ |
= Π|
|
|
‘ = |
|
|
2 |
|
= |
|
|
|
= |
|
Ì |
||||||
Bei der Berechnung der Ableitung ist man bereits bei einfachen Beispielen auf eine Kombination der Ableitungsregeln angewiesen.
Beispiel 6.14 (Ableitungsregeln) |
3 x ex |
|
|
|
|
|
|
||||||||||||
Die Ableitung der Funktion f |
x |
|
|
berechnen wir nach der Quotientenregel |
|||||||||||||||
) = e2 x x1 |
|||||||||||||||||||
|
|
3 x e |
x |
|
e2 |
x |
( |
|
|
e2 |
x |
1 |
|
|
|||||
f x |
|
|
′ |
|
|
|
1 |
|
3 x e+ |
|
′ |
. |
|||||||
|
|
|
|
|
|
e2 x |
1 2 |
|
|
|
|
|
|||||||
′( ) = ( |
|
|
) ‰ |
|
|
+ |
|
|
Ž − |
‰ |
|
|
+ Ž |
||||||
Die Berechnung der Ableitung der einzelnen Ausdrücke erfordert weitere Ableitungsregeln. Nach |
|||||||||||||||||||||||
der Produktregel gilt |
|
|
|
( |
|
+ |
) |
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
3 x ex ′ |
|
3 ex 3 x ex 3 1 x ex. |
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
e2 x |
müssen= ( wir+ die) |
Kettenregel berücksichtigen: |
|
|
|
|||||||||||||
Bei der(Ableitung) = von + |
|
|
|
|
|
||||||||||||||||||
e2 x ′ |
e2 x |
2 |
2 e2 x. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Schließlich‰ |
benötigenŽ = |
wir= |
|
die Summenregel für |
|
|
|
|
|
|
|
|
|
|
|
||||||||
e2 x 1 ′ |
2 e2 x. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Insgesamt‰ |
ergibt+ Ž sich= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
f |
|
x |
3 1 x ex e2 x 1 |
6 x exe2 x |
3ex 1 x e2 x x e2 x |
|
. |
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
x |
|
|
|
2 |
|
|
|||
′ |
( |
) = |
( + ) ‰e2 x |
+ |
1Ž − |
|
= |
‰ |
+e2+ |
+ |
1 |
− |
Ž |
|
Ì |
||||||||
|
|
|
|
|
|
( |
+ |
) |
|
|
|
( |
|
|
) |
|
|
|
|
||||
6.2.2 Ableitung der Umkehrfunktion
Eine ganze Reihe wichtiger Funktionen, wie beispielsweise die Wurzelfunktionen, die Arkusfunktionen und die Logarithmusfunktionen basieren auf dem Prinzip der Umkehrfunktion. Wir werden sehen, dass zwischen der Ableitung einer Funktion und der Ableitung der Umkehrfunktion ein Zusammenhang besteht. Kennt man von einer Funktion die Ableitung, dann kann man durch diesen Zusammenhang die Ableitung der Umkehrfunktion ermitteln.
262 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
6 Di erenzialrechnung |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
Wenn wir diesen Ausdruck mit xnerweitern, x |
= |
√y und x |
= |
y ersetzen, erhalten wir |
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
||||
|
|
|
|
|
|
|
|
|
|
x |
|
|
|
|
x |
|
|
|
|
|
. |
|
|
|
|
|
||||||
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
|
|
|
|
|
|||||||||
y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
)′ |
= n x |
|
|
− |
|
|
x = n x |
|
= |
√ |
|
|
|
|
|
|
|
|||||||||||||||
( √ |
|
n |
1 |
n |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n y |
|
|
|
|
|
|
|
|||
Vertauschen von x und y liefert schließlich |
|
|
|
|
|
|
|
|||||||||||||||||||||||||
√ |
|
|
′ |
|
|
√ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
n |
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
n x |
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
n x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
Einprägsamer( ) = |
ist diese Formel, wenn wir mit gebrochenrationalen Hochzahlen arbeiten: |
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
xn |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
xn |
|
|
′ |
|
|
|
|
xn −1. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
n x |
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
Somit( |
gilt) =die Potenzregel= |
auch für rationale Hochzahlen. Aus Stetigkeitsgründen gilt die |
||||||||||||||||||||||||||||||
Potenzregel schließlich für alle reellen Exponenten, also für Funktionen der Form xa, a R.
c) Der |
Arkustangens ist die Umkehrfunktion des Tangens. Die |
Ableitung |
des Tangens |
||||||||
|
tan |
2 |
x |
|
|
||||||
f |
x |
) = |
tan x kennen wir bereits aus Beispiel 6.12. Sie lautet f′ |
( |
x |
) = |
|
+ |
1. Somit kön- |
||
|
( |
|
|
|
|
|
|
||||
nen wir mit der Formel für die Ableitung der Umkehrfunktion auch die Ableitung für den Arkustangens bestimmen:
(arctan y)′ = ‰f−1(y)Ž′ = |
|
1 |
|
= |
1 |
|
|
. |
|||||||||||||
f′ |
x |
|
tan2 x |
+ |
1 |
||||||||||||||||
Durch Ersetzen von |
tan x |
|
y ergibt sich |
|
|
||||||||||||||||
|
|
|
= |
|
|
( |
) |
|
|
|
|
||||||||||
(arctan y)′ |
= |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
||||
y2 |
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|||||||
und nach |
Vertauschen von x und y die Ableitung |
||||||||||||||||||||
|
|
|
|
|
|
+ |
|
|
|
|
|
|
|
|
|
|
|
|
|||
( |
arctan x |
′ |
= |
|
|
|
1 |
|
. |
|
|
|
|
|
|
|
|
Ì |
|||
|
1 |
+ |
x2 |
|
|
|
|
|
|
|
|
||||||||||
|
|
) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
6.2.3 Logarithmisches Di erenzieren
Das sogenannte logarithmische Ableiten ist weitaus weniger spektakulär als die Bezeichnung vermuten lässt. Letztendlich verbirgt sich dahinter eine Methode, mit der man Funktionen, bei denen die Variable im Exponenten auftaucht, ableiten kann. Der Trick besteht dabei darin, die ursprüngliche Funktion mithilfe der e-Funktion und der ln-Funktion geschickt umzuformen und dann die Ableitung der umgeformten Funktion zu berechnen.
Logarithmisches Di erenzieren
Wenn bei einer Funktion f die Variable x im Exponenten auftaucht, dann kann man die Ableitung oft mit der Ableitung der e-Funktion und der Ableitung der ln-Funktion mithilfe der Darstellung
f′(x) = ‰eln f(x)Ž′
berechnen. Dabei spricht man vom logarithmischen Di erenzieren.
6.2 Ableitungstechnik |
263 |
Beispiel 6.16 (Logarithmische Ableitung)
a)Bei der Funktion f(x) = ax taucht die Variable x im Exponenten auf. Wir verwenden die Darstellung f(x) = eln ax . Nach den Rechenregeln für den Logarithmus formen wir um:
|
d |
|
d |
x |
d |
x |
|||
|
|
ax |
= |
|
eln a |
= |
|
ex ln a = (ln a) ex ln a = (ln a) eln a |
= (ln a) ax. |
dx |
dx |
dx |
|||||||
Dabei haben wir verwendet, dass die Ableitung der e-Funktion wieder die e-Funktion ergibt, wobei der Faktor ln a durch die Kettenregel entsteht.
b) Dieselbe Vorgehensweise wenden wir auch auf die Funktion f(x) = xx an:
|
d |
|
d |
x |
d |
|
d |
|
||||
|
|
xx |
= |
|
eln x |
= |
|
ex ln x |
= ex ln x |
|
|
(x ln x) = xx (ln x + 1) . |
dx |
dx |
dx |
dx |
|||||||||
Dabei haben wir für die innere Ableitung die Produktregel verwendet:
|
d |
|
(x ln x) = 1 ln x + x |
|
1 |
|
= ln x + 1. |
Ì |
|
dx |
|
x |
|||||
6.2.4 Implizites Di erenzieren
Wir haben bereits in Abschnitt 5.1.4 gesehen, dass man Funktionen auch durch implizite Gleichungen in x und y darstellen kann. Prinzipiell kann man versuchen, die Gleichung nach y aufzulösen und dann die Ableitung nach x zu berechnen. Diese Vorgehensweise ist im Vergleich zu der Methode des impliziten Di erenzierens, die wir nun diskutieren, meistens aufwendiger. Mithilfe des impliziten Di erenzierens kann man Ableitungen y′(x) berechnen, ohne dass man die Funktionsgleichung y(x) vorher explizit bestimmt hat.
Beispiel 6.17 (Implizite Ableitung) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
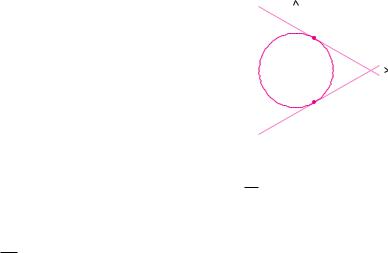
a) Der Einheitskreis wird durch die implizite Glei- |
|
|
|
|
|
|
|
|
|
y |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
chung x2 |
|
+ |
y2 |
= |
1 beschrieben. Wir bestimmen |
|
|
|
|
|
|
|
|
|
|
|
|
|
¯ |
|
√ |
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
3 |
|
|
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
die Tangente an der Stelle x |
= |
21 |
. Die zugehö- |
|
|
|
|
|
|
|
|
1 |
|
P ³ |
2 |
¯ |
2 |
´ |
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||
rigen y-Werte sind y |
= ± |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
3. Zur Bestimmung |
|
|
|
|
|
|
2 |
1 |
|
|
|
|
|
|
|
2 |
x |
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|||||||||
der Steigung der Tangente√betrachten wir y als |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
eine Funktion der Variablen x und leiten die im- |
|
|
|
|
|
|
− |
− |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
plizite Gleichung nach x ab: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
P ³ |
|
¯ |
|
|
|
√ |
|
´ |
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ddx |
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
||||||
|
x2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
y x 2 |
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
3 |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
− |
2 |
− 2 |
|
||||||||||||||||
|
2 x |
|
|
|
+ |
|
2y |
|
x |
y( ) |
|
= |
|
|
0 |
V |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
|
¯ |
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
+ |
|
|
|
|
( ) |
|
′( ) |
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Dadurch erhalten wir eine Formel für die |
Ableitung y |
′ |
|
x |
−y |
, ohne explizit eine Formel |
||||||||||||||||||||||||||||||||||||||||||||||
|
‰ |
1 |
T ± |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
( |
|
|
) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
für |
y |
|
x |
|
|
bestimmt zu haben. Im Punkt |
P |
|
|
|
|
3 |
|
|
beträgt die Steigung der Tangente |
|||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
2 |
|
2 |
√ |
|
( ) = |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
somit |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
y′ ‹ |
1 |
• = ± |
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
√ |
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||