

442 |
11 Komplexe Zahlen und Funktionen |
Beispiel 11.9 (Zerlegung in komplexe Linearfaktoren)
a) Wir suchen alle Lösungen der Gleichung
z3 + z2 + 8 z − 10 = 0.
Eine Lösung ist z1 = 1. Dadurch kann man den Linearfaktor z − 1 abspalten:
‰ |
|
z3 |
z2 |
+ 8 |
z |
− 10 Ž ‰ |
z |
z2 |
+ 2 |
z |
+ 10 |
− |
z3 |
+ z2 |
|
− 1Ž = |
|
|
|||||
|
|
+ |
|
|
|
|
|
|
|
|
2z2 + 8z
− 2z2 + 2z
10z − 10 − 10z + 10
0
Die beiden restlichen Lösungen bilden ein konjugiert komplexes Paar:
|
2 |
|
i√ |
|
|
|
− |
± |
40 |
− |
4 |
||
|
2 |
|
|
b)Wir suchen eine Gleichung, die die komplexe Lösung z1 = −1 + i hat. Damit die Koe zienten der Gleichung alle reell sind, muss auch die konjugiert komplexe Zahl z2 = −1 − i eine Lösung sein. Dadurch ergibt sich die Darstellung mit Linearfaktoren:
‰ |
z |
− (− |
1 |
i z |
− (− |
1 |
i |
z |
+ |
1 |
− |
i |
)( |
z |
+ |
1 |
+ |
i |
) = ( |
z |
+ |
1 |
) |
2 |
− |
i2 |
= |
z2 |
+ |
2 z |
+ |
2. |
|
|
+ )Ž‰ |
|
− )Ž = ( |
|
|
® |
|
|
® |
|
|
|
¯ |
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
± |
|
|
± |
|
´¹¹¹¹¹¹¹¹¹¹¹¹¸¹¹¹¹¹¹¹¹¹¹¹¹¶ |
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
a |
|
|
b |
|
|
a |
|
|
b |
|
|
a2 |
|
|
|
b2 |
|
|
|
|
|
|
|
Die gesuchte Gleichung lautet z2 + 2 z + 2 = 0. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ì |
||||||||||||||
11.4 Komplexe Funktionen
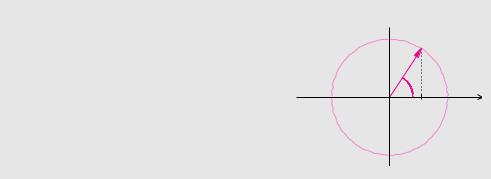
Die Untersuchung komplexer Funktionen ist im Rahmen der sogenannten Funktionentheorie ein großes Gebiet der Mathematik mit entsprechend weitreichendem Anwendungsspektrum. Wesentlich beeinflusst haben die Funktionentheorie Mathematiker wie AugustinLouis Cauchy, Karl Theodor Wilhelm Weierstraß, Felix Klein und Félix Édouard Justin Émile Borel. Im Grunde lassen sich mit komplexen Zahlen genau wie mit reellen Zahlen Funktionen definieren. Eine komplexwertige Funktion mit einer komplexen Variablen ist eine Abbildung, die jeder komplexen Zahl aus dem Definitionsbereich eine komplexe Zahl zuordnet. Bereits die grafische Darstellung von komplexen Funktionen stellt eine Herausforderung dar. Komplexwertige Funktionen von komplexen Veränderlichen erfordern die Visualisierung von vier Dimensionen. Wir betrachten deshalb in diesem Abschnitt nur einfache komplexwertige Funktionen. Das sind zum einen Funktionen, die einer reellen Zahl eine komplexe Zahl zuordnen, und zum anderen Transformationen der komplexen Ebene, wie etwa Verschiebungen, Skalierungen und Rotationen. Außerdem verwenden wir die Darstellung harmonischer Schwingungen mithilfe komplexer Zeiger zur Überlagerung gleichfrequenter harmonischer Schwingungen.

 z(1)
z(1)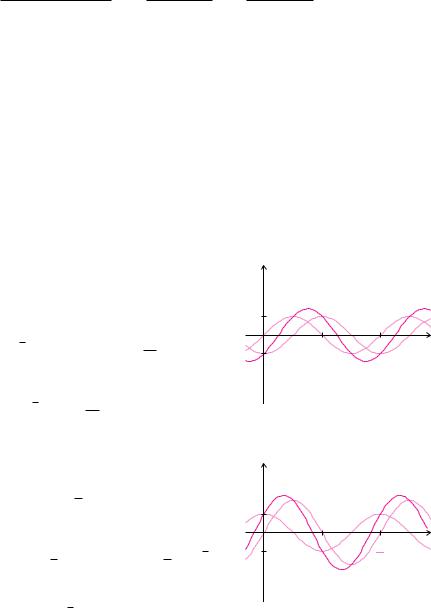
11.4 Komplexe Funktionen |
445 |
Die Formeln aus Satz 11.17 kann man mit den Darstellungen von Sinus und Kosinus durch komplexe e-Funktionen aus Satz 11.2 herleiten:
A ei (ω t+ϕ) |
e−i (ω t+ϕ) |
|
C1 |
ei ω t |
|
e−i ω t |
C2 |
ei ω t |
|
e−i ω t . |
|
+2 |
= |
|
|
+2 |
+ |
|
|
− |
|
|
|
|
|
|
|
|
|
|
2 i |
|
Daraus ergibt sich
ei ω t |
A ei ϕ |
C1 |
i C2 |
Ž + |
e−i ω t |
A e−i ϕ |
C1 |
i C2 |
Ž = |
0. |
|
‰ A ei ϕ |
− C1 |
+ i C2 |
|
‰ A e−i ϕ |
− C1 |
− i C2 |
|
||
|
´¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¸¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¶ |
|
|
´¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¸¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¶ |
|
|
||||
|
|
= |
− |
|
|
|
= |
+ |
|
|
Die Gleichung ist sicher erfüllt, wenn A ei ϕ = C1 − i C2. Die Darstellung in Satz 11.17 verwendet den Kosinus als Grundfunktion. Genau so gut könnten wir auch den Sinus verwenden. Mit C1 = 0 und C2 = 1 ergibt sich
A = 1, ϕ = arg(−i) = − |
π |
Ô sin (ω t) = cos ‹ω t − |
π |
•. |
2 |
2 |
Man sagt, der Kosinus eilt dem Sinus um den Phasenwinkel π2 voraus.
Beispiel 11.11 (Harmonische Schwingungen) |
|
|
|
|
|
|
|
|
|
||||||||||||
a) |
Die harmonische Schwingung |
|
|
x |
|
|
|
|
|
|
|
|
|||||||||
|
x |
t |
) = − |
cos t |
+ |
sin t |
|
|
|
1 |
|
|
cos t |
|
|
|
|
||||
|
|
( |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
können wir durch |
|
|
|
|
|
|
|
− |
−cos t + sin t |
|||||||||||
|
A = √2, ϕ = arg(−1 − i) = − |
34 |
|
−1 |
sin t |
|
2π |
|
|
|
t |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
π |
|
|
π |
|
|
|
|
|
|
|
|
auch als phasenverschobenen Kosinus darstellen: |
|
|
|
|
|
|
|
|
|
|||||||||||
|
x(t) = √2 cos ‹t − |
34 |
•. |
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
π |
|
|
|
|
|
|
|
|
|
|
|
|
b) |
Aus der Darstellung |
|
|
|
|
x |
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
π |
|
|
|
|
|
|
|
2 cos |
t |
|
π |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
||||
|
x(t) = 2 cos |
|
|
|
• |
|
|
|
|
|
|
|
¡ |
|
− |
¢ |
|||||
|
‹t − 3 |
|
|
|
1 |
|
cos t |
|
|
||||||||||||
|
ergibt sich mit |
|
|
|
|
|
|
|
3 • = √3 |
|
|
|
|
|
|
|
|
|
|||
|
C1 = 2 cos ‹ |
3 |
• = 1, |
C2 = 2 sin ‹ |
− |
π |
|
|
2π |
|
|
|
t |
||||||||
|
|
|
|
√3 sin t |
|
|
|||||||||||||||
|
|
|
|
|
π |
|
|
|
|
|
π |
1 |
|
|
|
|
|
|
|
|
|
|
die phasenwinkelfreie Darstellung |
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
x(t) = cos t + √3 sin t. |
|
|
|
|
|
|
|
|
|
|
Ì |
|||||||||

11.4 Komplexe Funktionen |
447 |
Unser Ziel ist es, A und ϕ in Abhängigkeit von A1, A2, ϕ1 und ϕ2 darzustellen. Aufgrund der gemeinsamen Kreisfrequenz lässt sich die Gleichung durch ei ω t teilen:
A1 ei (ω t+ϕ1) + A2 ei (ω t+ϕ2) = A ei (ω t+ϕ) Ô A1 ei ϕ1 + A2 ei ϕ2 = A ei ϕ.
Diese Gleichung stellt eine gewaltige Vereinfachung dar. Sie ist unabhängig vom Parameter t. Unsere gesuchten Größen A und ϕ lassen sich durch Addition der Zeiger ermitteln.
Überlagerung harmonischer Schwingungen durch Zeigeraddition
Die Überlagerung x der beiden harmonischen Schwingungen x1 und x2 mit gleicher Kreisfrequenz ω kann folgendermaßen durchgeführt werden:
(1) Stelle beide harmonischen Schwingungen als phasenverschobenen Kosinus dar:
x1(t) = A1 cos (ω t + ϕ1), x2(t) = A2 cos (ω t + ϕ2).
(2) Ordne jeder Schwingung den entsprechenden komplexen Zeiger zu:
x1(t) Ð→ z1 = A1 ei ϕ1 , |
x2(t) Ð→ z2 = A2 ei ϕ2 . |
(3)Stelle die Addition der beiden Zeiger in Exponentialform dar: z = z1 + z2 = A1 ei ϕ1 + A2 ei ϕ2 = A ei ϕ.
(4)Die überlagerte Schwingung x hat die Amplitude A und den Phasenwinkel ϕ: x(t) = x1(t) + x2(t) = A cos (ω t + ϕ).
Die Überlagerung harmonischer Schwingungen durch Zeigeraddition erfordert die Addition zweier komplexer Zahlen in Exponentialform. Dazu müssen die beiden Zahlen zunächst in kartesische Form umgerechnet werden. Dann addiert man die beiden Realteile und die beiden Imaginärteile. Schließlich wird das Ergebnis in Exponentialform umgerechnet.
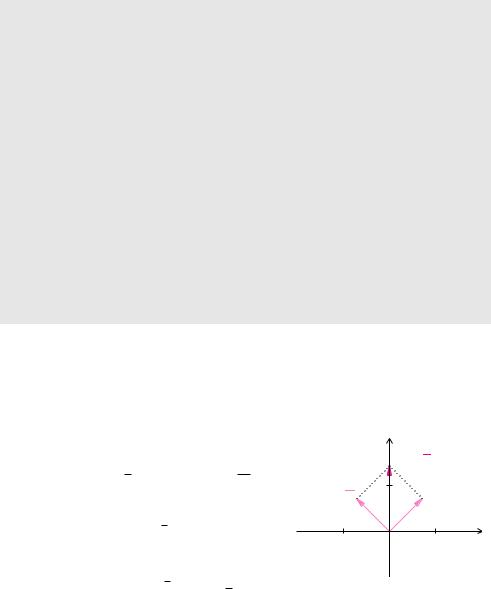
Beispiel 11.12 (Überlagerung harmonischer Schwingungen durch Zeigeraddition)
a) |
Zur Addition der harmonischen Schwingungen |
|
Im |
√ |
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z = |
i π2 |
|
|
|
|
|
)= |
cos |
‹ |
2t |
π |
|
|
)= |
cos |
‹ |
2t |
|
3π |
|
|
2e |
|
|||
|
x1 |
t |
, x2 |
t |
|
z2 = ei 34π |
i |
z1 = ei π4 |
|
|||||||||||||
|
|
( |
|
|
|
+ • |
|
( |
|
|
+ • |
|
||||||||||
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
addieren wir die beiden Zeiger |
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
z1 |
|
z2 |
ei π4 |
|
ei 34π |
√2ei π2 . |
|
|
|
|
−1 |
|
|
1 |
Re |
||||||
|
Dadurch+ |
ergibt= |
sich+ |
= |
|
|
|
|
|
|
•. |
|
|
|
|
|
||||||
|
x(t) = x1(t) + x2(t) = √2 cos ‹2 t + |
2 |
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
π |
|
|
|
|
|
|