


204 |
5 Funktionen |
Die Bezeichnung mit dem „großen O“ geht auf die beiden deutschen Mathematiker Paul Bachmann und Edmund Landau zurück. Manchmal wird auch die Bezeichnung mit dem Gleichheitszeichen ak = O(bk) anstelle der Elementrelation verwendet. Streng genommen ist diese Bezeichnung nicht korrekt, denn viele unterschiedliche Folgen können dieselbe asymptotische obere Schranke besitzen, siehe Beispiel 5.52.
Das Landau-Symbol wird in der theoretischen Informatik bei der Komplexitätsanalyse von Algorithmen verwendet. Es gibt auch noch ein Landau-Symbol mit dem „kleinen o“. Auf weitere Details dazu verzichten wir und verweisen auf [Heuser:Analysis] und [Höllig].
5.5.2 Grenzwert einer Funktion
An den Stellen, an denen eine Funktion eine Definitionslücke besitzt, kann man keinen Funktionswert berechnen. Mithilfe von Folgen können wir uns jedoch beliebig nahe an Definitionslücken herantasten. Bei diesem Herantasten an eine Definitionslücke entstehen unterschiedliche E ekte, die wir genauer analysieren werden.
Beispiel 5.53 (Grenzwert einer Funktion)
Die |
Funktion |
1 |
|
x3 cos |
2 x |
|
ist |
|
|
x |
|
0 |
|
|
|
|
anderen |
|||||||
f x |
− |
−x2 |
( |
) |
|
|
|
|
|
|
|
|
||||||||||||
-Werten |
|
( ) = |
|
|
|
zwar für |
|
= |
|
nicht |
definiert, zu allen |
1 |
|
|||||||||||
x |
|
|
können wir die Funktionswerte jedoch berechnen. Die Folge mit den Gliedern ak |
|
|
|
||||||||||||||||||
|
|
|
10k |
|||||||||||||||||||||
konvergiert gegen die Definitionslücke |
x |
|
0 |
. Wenn wir die Folgenglieder in die Funktion |
einsetzen, |
|||||||||||||||||||
|
= |
|
|
= − |
||||||||||||||||||||
erhalten wir |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
ak |
|
−0.1000 |
−0.0100 |
−0.0010 |
−0.0001 |
|
. . . |
→ |
0 |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
f(ak) |
|
2.0933 |
2.0099 |
2.0010 |
2.0001 |
|
. . . |
→ |
2? |
|
|
|
|
|
||||||||
1
Auch die Folge mit den Gliedern bk = 10k konvergiert gegen die Definitionslücke x = 0. Eingesetzt in die Funktionsgleichung ergibt sich
|
bk |
−0.1000 |
−0.0100 |
−0.0010 |
−0.0001 |
. . . → 0 |
|
|
|
|
||||
|
f(bk) |
1.8933 |
|
1.9899 |
1.9990 |
1.9999 |
. . . → 2? |
|
|
|||||
Alle Folgenglieder der Folge |
ak |
sind negativ, sie nähern sich der Definitionslücke x 0 von |
||||||||||||
links. Entsprechend nähert |
sich die Folge |
bk |
der Definitionslücke x 0 von rechts. Aufgrund |
|||||||||||
|
( ) |
|
|
|
|
|
|
|
= |
|
||||
der Zahlenwerte vermuten wir, dass die |
Funktionswerte in beiden Fällen gegen den Grenzwert 2 |
|||||||||||||
|
( ) |
|
|
= |
|
Ì |
||||||||
konvergieren. |
|
|
|
|
|
|
|
|
|
|
|
|
||
Die Vorgehensweise in Beispiel 5.53 zur Ermittlung des Grenzwerts einer Funktion ist zwar mithilfe von Taschenrechnern oder Computern einfach möglich. Aus Sicht der Mathematik ist diese intuitive Methode jedoch unbefriedigend. Wir werden später eine Methode zur Grenzwertbestimmung kennenlernen, die unter dem Namen Bernoulli-de l’Hospital bekannt ist, siehe Abschnitt 6.3.
5.5 Grenzwert und Stetigkeit |
205 |
Definition 5.38 (Grenzwert einer Funktion)
Die Funktion f hat an der Stelle x0 den Grenzwert G, wenn für jede gegen x0 konvergente Zahlenfolge (xn) die Folge der Funktionswerte (f(xn)) gegen G konvergiert.
Man verwendet die Schreibweise f(x) → G für x → x0 oder lim f(x) = G.
x→x0
Diese Definition ist für praktische Zwecke ungeeignet, denn sie fordert, dass man alle gegen x0 konvergenten Zahlenfolgen betrachtet. Ähnlich wie bei der Definition des Grenzwert einer Zahlenfolge, siehe Definition 5.33, kann man den Grenzwert einer Funktion auch mithilfe einer ε-Umgebung definieren. Für Grenzwerte von Funktionen gelten entsprechende Rechenregeln wie für Grenzwerte von Zahlenfolgen, siehe Satz 5.15.
Satz 5.17 (Rechnen mit Funktionsgrenzwerten)
|
f |
|
g |
lim f |
x |
F |
lim g |
x |
G |
|
Wenn |
|
und |
|
Funktionen sind mit x→x0 |
( ) = |
|
und x→x0 |
( ) = |
|
, dann gilt: |
L Es existiert auch der Funktionsgrenzwert von f(x) ± g(x) an der Stelle x0, nämlich
lim (f(x) ± g(x)) = F ± G.
x→x0
L Es existiert auch der Funktionsgrenzwert von f(x) g(x) an der Stelle x0, nämlich
lim (f(x) g(x)) = F G.
x→x0
|
|
|
|
|
|
|
|
|
|
|
|
f x |
|
|
|
L |
Es existiert auch der Funktionsgrenzwert |
von |
g(x) |
an |
der Stelle x0, nämlich |
||||||||||
lim |
f x |
|
F |
|
Funktion g x |
|
in einer Umgebung von |
||||||||
|
|
|
|
|
|
|
|
||||||||
|
g |
(x) |
|
G |
. Das gilt nur, wenn die |
|
|||||||||
|
x |
→ |
x0 |
|
|
|
( ) |
( |
) |
|
|||||
|
|
|
Π|
( ) |
‘ = |
|
|
|
|
||||||
x0 und der Grenzwert G nicht null sind.
Nicht immer liefert die Annäherung von links und die Annäherung von rechts dasselbe Ergebnis. Deshalb unterscheidet man zwischen linksseitigem und rechtsseitigem Grenzwert.
Definition 5.39 (Linksseitiger und rechtsseitiger Grenzwert)
Wenn man bei der Grenzwertberechnung einer Funktion f an der Stelle x0 nur Zahlenfolgen (xn) betrachtet, die kleinere Werte als x0 enthalten, dann bezeichnet man den Grenzwert als linksseitigen Grenzwert GL, Zahlenfolgen mit größeren Werten als x0 erzeugen den rechtsseitigen Grenzwert GR. Man verwendet die Schreibweisen
lim |
− |
f |
( |
x |
) = |
G |
L |
, |
lim |
+ |
f |
x |
G |
R |
. |
x→x0 |
|
|
|
|
x→x0 |
|
( ) = |
|
|
5.5 Grenzwert und Stetigkeit |
207 |
Bedingungen für Stetigkeit
Eine Funktion ist genau dann stetig an der Stelle x0, wenn alle folgenden Bedingungen erfüllt sind:
(1)Die Funktion ist an der Stelle x0 selbst und in einer Umgebung der Stelle x0 definiert.
(2)Der Grenzwert der Funktion an der Stelle x0 existiert. Insbesondere müssen der linksseitige Grenzwert GL und der rechtsseitige Grenzwert GR an der Stelle x0 existieren und gleich sein.
(3)Grenzwert und Funktionswert stimmen an der Stelle x0 überein.
Beispiel 5.55 (Untersuchung auf Stetigkeit)
a) |
Die Funktion f x |
|
|
1 |
|
ist an der Stelle x 1 nicht definiert, also erst recht nicht stetig. |
|||||||
|
x |
− |
1 |
||||||||||
|
|
|
|
|
|
stimmen linksseitiger und rechtsseitiger Grenzwert an der |
|||||||
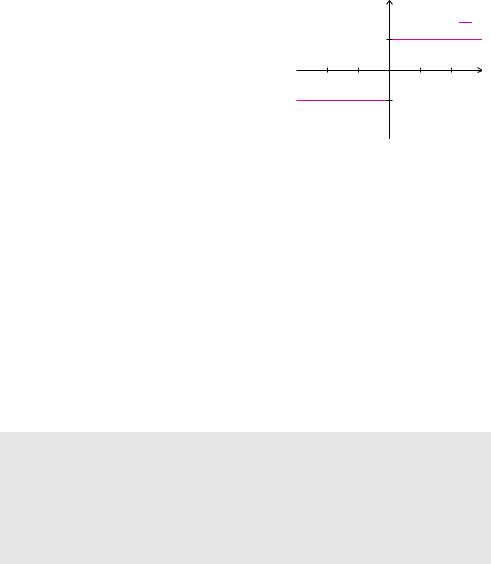
b) |
Bei der |
Funktion f x |
sgn x |
|
|||||||||
( ) = |
|
|
|
|
|
|
= |
|
|
||||
|
Stelle 0 nicht überein, denn GL |
|
lim sgn x |
|
1 und GR lim sgn x 1. Somit ist die |
||||||||
|
|
|
( |
) = |
|
( ) |
x 0 |
|
|
x 0 |
|
||
|
Funktion an der Stelle x |
|
0 auch nicht stetig. |
= → + ( ) = |
|
||||||||
|
|
|
|
|
|
= |
|
= |
→ − |
( ) = − |
Ì |
||
|
|
|
|
|
|
|
|
|
|
|
|
||
Abgesehen von ihren Definitionslücken sind alle elementaren Funktionen überall stetig.
Stetigkeit elementarer Funktionen
Alle elementaren Funktionen sind auf ihrem Definitionsbereich überall stetig.
Die Summe, die Di erenz, das Produkt und der Quotient stetiger Funktionen ergibt wieder eine stetige Funktion.
Satz 5.18 (Kombination stetiger Funktionen)
Wenn f und g stetige Funktionen an der Stelle x0 sind, dann gilt:
L |
Die Funktion f ± g ist auch stetig in x0. |
||
L |
Die Funktion f g ist auch stetig in x0. |
||
L |
f |
||
Die Funktion |
|
ist auch stetig in x0, falls g(x0) ≠ 0. |
|
g |
|||
Auch für die Komposition von stetigen Funktionen gilt, dass das Resultat wieder eine stetige Funktion ergibt.
Satz 5.19 (Komposition stetiger Funktionen)
Wenn g eine stetige Funktion an der Stelle x0 ist und f eine stetige Funktionen an der Stelle f(x0) ist, dann gilt: Die Funktion f ○ g ist auch stetig an der Stelle x0.
210 |
5 Funktionen |
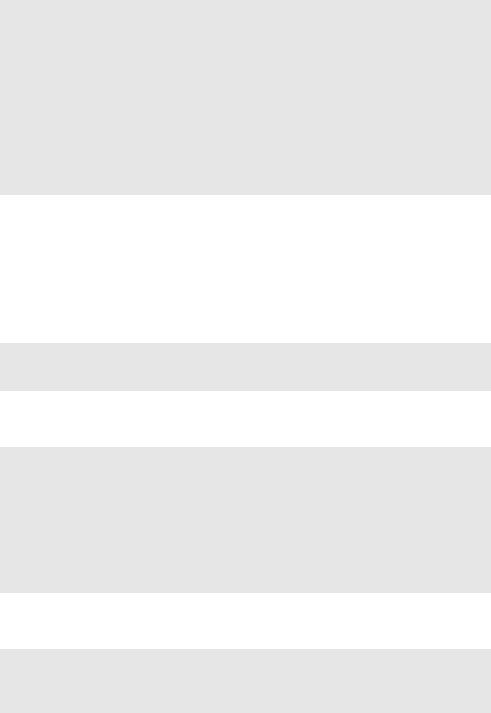
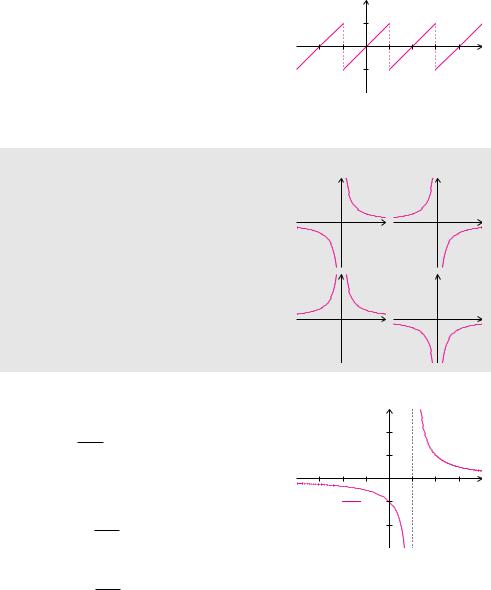
b) |
Die Funktion |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
|
f (x) = |
2 |
1 |
||||
|
|
(x) = x2 |
1 |
|
|
|
= |
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
x +x−2 |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
f |
+ |
x |
− |
|
2 |
x |
|
− |
1 x |
+ |
2 |
) |
|
|
|
|
|
|
|
1 |
|
|
|
|
|
||||||||
|
hat an den |
|
|
|
|
( |
|
|
|
)( |
|
|
|
2 De- |
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
beiden Stellen x |
|
|
1 und x |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
finitionslücken. Die |
linksseitigen und die rechts- |
3 |
2 |
1 |
|
1 |
2 |
3 |
|
x |
|||||||||||||||||||||||
|
− |
− |
− |
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
= |
|
|
|
|
|
|
= − |
|
|
|
|
|
|
|
|
|
||||||||||||
|
seitigen Grenzwerte sind an beiden Stellen un- |
|
|
|
−1 |
|
|
|
|
|
||||||||||||||||||||||||
|
eigentliche Grenzwerte und haben unterschiedli- |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
che Vorzeichen. An den Stellen x |
|
1 und x |
= − |
2 |
|
|
|
−2 |
|
|
|
|
|
||||||||||||||||||||
|
liegen Pole mit |
Vorzeichenwechsel vor. |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
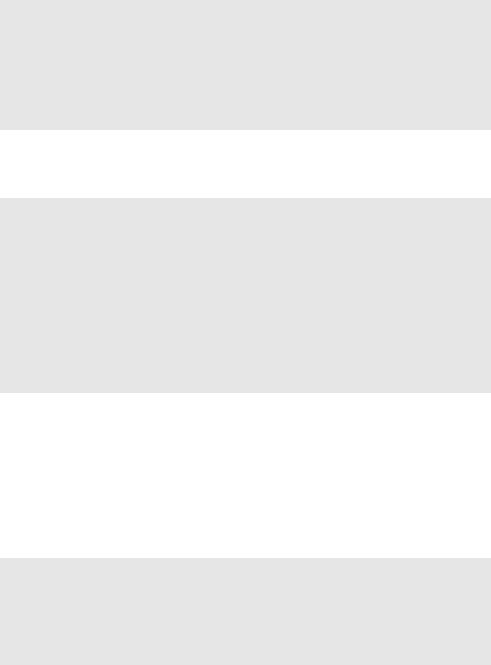
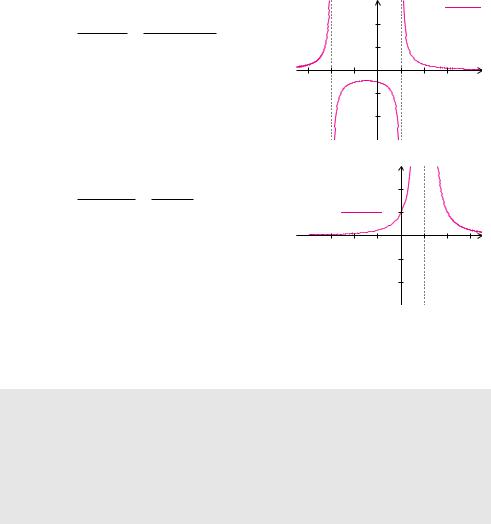
c) |
Bei der Funktion |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
|
|
|
|
|||||
|
f |
x |
|
|
1 |
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
x 1 |
|
|
|
|
|
|
|
|
|
f (x) = x2−2x+1 |
1 |
|
|
|
|
||||||||||
|
|
( ) = x 2 x 1 = |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
ist die |
|
2 |
− |
|
|
+ |
|
( |
|
|
− |
|
|
) |
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
Definitionslücke x 1 eine doppelte Nen- |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
nernullstelle. Der |
linksseitige und der rechtssei- |
|
3 |
2 |
1 |
|
1 |
2 |
|
3 x |
|||||||||||||||||||||||
|
|
− |
− |
− |
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
tige Grenzwert ist ein uneigentlicher Grenzwert. |
|
|
|
|
−1 |
|
|
|
|
||||||||||||||||||||||||
|
Sie |
haben |
dasselbe |
Vorzeichen. An |
der |
Stelle |
|
|
|
|
−2 |
|
|
|
|
|||||||||||||||||||
|
x = 1 liegt ein Pol ohne Vorzeichenwechsel vor. |
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
Ì
An der Vielfachheit einer Nennernullstelle einer gebrochenrationalen Funktion, die nicht gleichzeitig eine Zählernullstelle ist, kann man ablesen, ob der zugehörige Pol einen Vorzeichenwechsel hat oder nicht.
Polstellen gebrochenrationaler Funktionen
Ist x0 eine p-fache Nullstelle des Nennerpolynoms einer gebrochenrationalen Funktion und nicht gleichzeitig eine Nullstelle des Zählerpolynoms, so hat die Funktion bei x0 eine Pol. Der Pol hat
Leinen Vorzeichenwechsel, falls p ungerade ist,
Lkeinen Vorzeichenwechsel, falls p gerade ist.
Anschaulich verbirgt sich hinter der Stetigkeit, dass man das komplette Schaubild einer stetigen Funktion ohne Absetzen des Stiftes zeichnen kann. Also können stetige Funktionen keine Werte überspringen. Diese wichtige Eigenschaft stetiger Funktionen ist im Zwischenwertsatz beschrieben. Jeder Wert zwischen zwei Funktionswerten an zwei Stellen wird von einer stetigen Funktion auch angenommen.