

6.4 Geometrische Bedeutung der Ableitungen |
277 |
6.4.5 Wendepunkte
Die zweite Ableitung charakterisiert das Krümmungsverhalten. Bei einer Funktion mit stetigem Verlauf der zweiten Ableitung, die sowohl Punkte mit negativer als auch mit positiver Krümmung besitzt, muss es auch Punkte geben, an denen die Krümmung ihr Verhalten ändert. Solche Punkte bezeichnet man als Wendepunkte. Wenn wir uns vorstellen, dass wir mit einem Fahrzeug an dem Schaubild der Funktion entlang fahren, dann sind Wendepunkte diejenigen Punkte, an denen wir beim Wechsel von einer Linkskurve in eine Rechtskurve oder umgekehrt das Lenkrad für einen Augenblick gerade halten.
Definition 6.11 (Wendepunkt)
Ein Wendepunkt ist ein Kurvenpunkt, an dem das Schaubild einer Funktion von einer Linkskrümmung auf eine Rechtskrümmung wechselt oder umgekehrt.
Wendepunkte lassen sich durch Berechnung der Nullstellen der zweiten Ableitung lokalisieren. Allerdings ist eine Nullstelle der zweiten Ableitung noch nicht hinreichend für einen Wendepunkt. Wir müssen sicherstellen, dass tatsächlich ein Krümmungswechsel vorliegt. Dazu können wir die zweite Ableitung hinsichtlich eines Vorzeichenwechsels untersuchen oder uns an der dritten Ableitung orientieren.
Satz 6.14 (Bedingungen für einen Wendepunkt)
Wenn eine di erenzierbare Funktion f an der Stelle x0
Leinen Wendepunkt hat, dann ist dort die zweite Ableitung null. Die Bedingung f′′(x0) = 0 ist somit notwendig.
Leine zweite Ableitung hat, die dort null ist, und die dritte Ableitung dort zusätzlich
ungleich null ist, dann hat sie dort einen Wendepunkt. Die Bedingung f′′(x0) = 0 und f′′′(x0) ≠ 0 ist somit hinreichend.
Leine zweite Ableitung hat, die dort null ist, und die Ableitung f′′ beim Durchgang durch x0 das Vorzeichen wechselt, so hat f genau dann an der Stelle x0 einen Wendepunkt. Diese Bedingung ist somit notwendig und hinreichend.
Beispiel 6.28 (Wendepunkte)
Die Funktion
f |
x |
5 e− x22 |
|
|
|
|
|
|
( ) = |
|
x |
= ± |
1 |
jeweils einen Wendepunkt, siehe Beispiel 6.23. |
Ì |
hat an den Stellen |
|
|
|||||
Definition 6.12 (Sattelpunkt)
Ein Sattelpunkt ist ein Wendepunkt, an dem das Schaubild der Funktion zusätzlich eine waagrechte Tangente besitzt.
278 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
6 Di erenzialrechnung |
||||||||||||
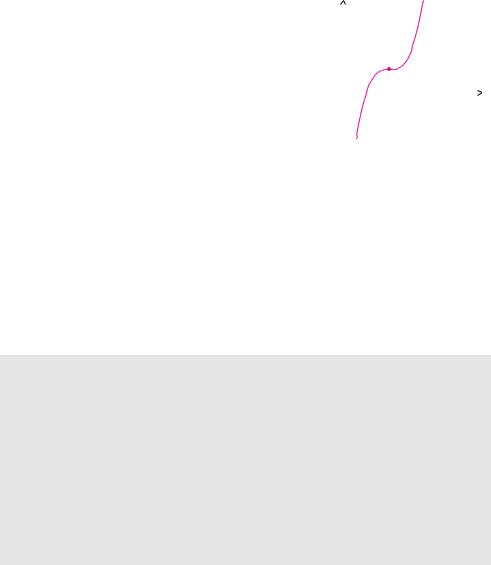
Beispiel 6.29 (Sattelpunkt) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
Wendepunkte der Funktion |
|
|
|
|
|
|
y |
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
f x x3 6 x2 |
|
12 x 7 |
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
bestimmen( )wir= |
mithilfe− |
|
der+ |
Ableitungen− |
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
f′ |
x |
|
3 x2 |
12 x |
|
12 |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
f′′ |
(x) = |
6 x |
|
|
−12 |
|
+ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Nur die |
|
|
|
|
−1 |
|
|
|
|
1 2 3 4 5 x |
||||||||||||||||||||
|
( ) |
= |
|
− |
|
|
|
|
|
|
−1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
Stelle x 2 kommt für einen Wendepunkt in |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
Frage. Es ist f′′′=2 6 und somit steht fest, dass an |
|
|
|
|
|
|
|
f (x) =x3 −6x2 +12x−7 |
||||||||||||||||||||||
|
|
|
|
|
|
|||||||||||||||||||||||||
der Stelle |
x 2 tatsächlich ein Wendepunkt vorliegt. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
( |
) = |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Bereits in |
Beispiel 5.39 haben wir gezeigt, dass der Wendepunkt auch ein Symmetriepunkt ist. |
|||||||||||||||||||||||||||||
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Zusätzlich ist an dieser Stelle auch noch die erste Ableitung null. Also hat die Funktion an der Stelle x = 2 nicht nur einen Wendepunkt, sondern sogar einen sogenannten Sattelpunkt. Ì
6.4.6 Globale Extrema
Bei der Bestimmung lokaler Extremwerte betrachtet man die Funktion nur in Umgebungen bestimmter Stellen x0. Bei vielen praktischen Problemen interessiert man sich jedoch für den tatsächlich kleinsten oder größten Funktionswert einer Funktion im gesamten betrachteten Definitionsbereich.
Definition 6.13 (Globales Minimum und Maximum)
Eine auf einem Intervall I definierte Funktion f besitzt an der Stelle x0
Lein globales Minimum, wenn alle anderen Funktionswerte im Intervall I nicht kleiner sind als der Funktionswert an der Stelle x0:
f(x) ≥ f(x0), x I.
Lein globales Maximum, wenn alle anderen Funktionswerte im Intervall I nicht größer sind als der Funktionswert an der Stelle x0:
f(x) ≤ f(x0), x I.
Globale Extrema werden auch als absolute Extrema bezeichnet. In der Regel bestimmt man globale Extremwerte, indem man alle lokalen Extremwerte, also einschließlich der Extremwerte am Rand des Definitionsbereichs, berechnet. Dabei gibt es weitere Gesichtspunkte, die wir uns an ein paar Beispielen klar machen.