


5.1 Einführung |
163 |
Definition 5.6 (Funktionsschar)
Eine Funktionsschar ist eine Menge verschiedener Funktionen, deren Zuordnungsvorschriften sich in einem Parameter unterscheiden. Zur Unterscheidung zwischen Variable und Scharparameter wird der Scharparameter üblicherweise als Index beim Funktionsnamen angegeben.
Beispiel 5.13 (Funktionsschar) |
|
|
|
|
|
|
|
|
|
|
|
||||||||||
a) |
Die Funktionsschar |
|
|
|
|
|
|
|
y |
|
|
|
|
|
|
||||||
|
fm x |
m x |
3 |
|
2 |
|
|
|
|
|
5 |
|
|
|
|
|
f1(x) |
||||
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
||||||||
|
besteht( |
aus) = allen( −Geraden,) + |
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
die durch den festen |
|
3 |
|
|
|
|
|
|
||||||||||||
|
Punkt |
3 2 |
|
gehen und eine beliebige Steigung |
|
2 |
|
|
|
|
|
|
|||||||||
|
haben.(NurS |
)die senkrechte Gerade x |
= |
3 gehört |
|
1 |
|
|
|
|
|
|
|||||||||
|
nicht zur Schar. Beispielsweise ist |
|
−1 |
|
1 2 3 4 5 6 7 x |
||||||||||||||||
|
f1 x x 1 |
|
|
|
|
|
|
|
|
||||||||||||
|
die Gerade( ) = |
|
mit− |
Steigung |
1 |
und y-Achsenab- |
−1 |
|
|
|
|
|
|
||||||||
b) |
schnitt −1. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Die Funktionsschar |
|
|
|
|
|
|
|
|
|
y |
|
|
|
|
|||||||
|
|
|
|
|
|
a 2 |
a2 |
|
|
|
|
|
|
|
3 |
|
|
|
|
||
|
fa x |
|
|
x |
|
|
|
|
|
|
|
|
2 |
|
|
|
|
||||
|
besteht( |
)aus= (Normalparabeln.− ) − |
Für jeden Wert des |
|
|
|
1 |
|
|
|
|
||||||||||
|
Parameters a hat der Scheitel der Parabel die |
|
|
|
|
|
|
|
|
||||||||||||
|
Koordinaten |
( |
a |
|
a2 |
|
. Beispielsweise ist |
−4 |
−3 |
−2 |
−1 |
1 |
2 |
3 |
4 x |
||||||
|
|
|
|
|
S −3 2) |
9 |
|
|
|
|
|
|
|
−2 |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
−1 |
|
|
|
|
|
f− 23 (x) = ‹x + 2 • − 4 |
|
|
|
|
|
f−23 (x) −3 |
|
|
|
|
||||||||||
eine Normalparabel mit Scheitel in ‹− |
3 |
V − |
9 |
•. |
|
2 |
4 |
Ì |
5.1.7 Verkettung von Funktionen
Der Funktionsbegri ist von zentraler Bedeutung in Mathematik, Naturwissenschaft und Technik. Eine wesentliche Ursache dafür ist das Baukastenprinzip. Komplizierte Funktionen entstehen durch Verkettung mehrerer einfacher Funktionen. Die einfachsten Arten von Verkettungen sind Verschiebungen und Skalierungen von Funktionen. Wir werden in diesem Abschnitt jedoch auch das allgemeine Verkettungsprinzip aufgreifen. In der Mathematik bezeichnet man dieses Prinzip als Komposition.
Auf Schaubilder von Funktionen lassen sich einfache geometrische Transformationen wie etwa Translationen oder Skalierungen anwenden. Uns beschäftigt die Frage, wie sich diese Transformationen auf die Funktionsgleichung auswirken.

5.1 Einführung |
165 |
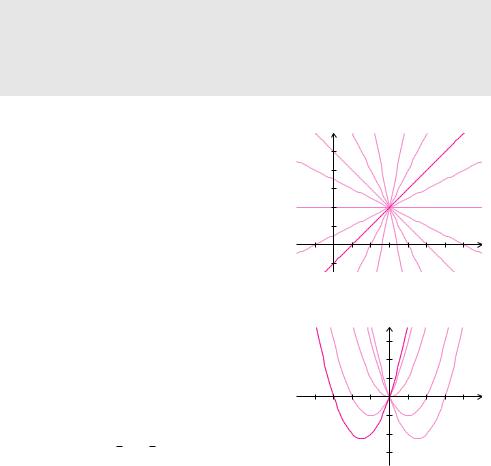
Definition 5.8 (Skalierung in x-Richtung)
Definiert man eine neue Funktion f˜, indem man in der Funktion f die Variable x durch a x ersetzt
f˜(x) = f(a x),
dann entsteht das Schaubild der neuen Funktion f˜ durch Skalierung des Schaubildes von f in Richtung der x-Achse. Für a > 1 wird das Schaubild gestaucht, für 0 < a < 1 wird es gedehnt. Negative a-Werte erzeugen zusätzlich eine Spiegelung an der y-Achse.
Beispiel 5.16 (Funktion skalieren in x)
Die Funktion |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
|
|
|
|
f(x) = |
1 |
3 |
− |
|
1 |
|
2 |
− |
3 |
|
|
|
|
|
|
|
|
|
|
|
2 |
˜ |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
f(x) |
|
|
|
||||||||||||
4 x |
|
|
4 x |
|
|
2 x |
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|||||||
soll um den Faktor 2 in x skaliert werden. Dazu er- |
|
|
|
|
|
|
|
|||||||||||||||||||||
setzen wir x durch 2 x in der Funktionsgleichung: |
3 |
2 |
1 |
1 |
2 |
3 |
x |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
− |
− |
− |
|
|
|
|
f˜ x |
|
f |
|
2 x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
−1 |
|
|
|
|
|||
( ) = |
|
1( |
|
2 x) |
3 |
|
1 |
( |
2 x |
) |
2 |
− |
3 |
2 x |
) |
|
|
−2 |
|
|
f (x) |
|||||||
|
= |
|
4 |
( |
|
|
) |
|
− |
|
|
( |
|
|
|
|
|
|
|
|
||||||||
|
= |
2 |
x3 |
− |
x2 |
− 3 |
x. |
|
|
|
|
|
|
|
|
|
|
|
|
Ì |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
Definition 5.9 (Skalierung in y-Richtung)
Definiert man eine neue Funktion f˜, indem man die Funktion f mit dem konstanten Faktor a multipliziert
f˜(x) = a f(x),
dann entsteht das Schaubild der neuen Funktion f˜ durch Skalierung des Schaubildes von f in Richtung der y-Achse. Für a > 1 wird das Schaubild gedehnt, für 0 < a < 1 wird es gestaucht. Negative a-Werte erzeugen zusätzlich eine Spiegelung an der x-Achse.
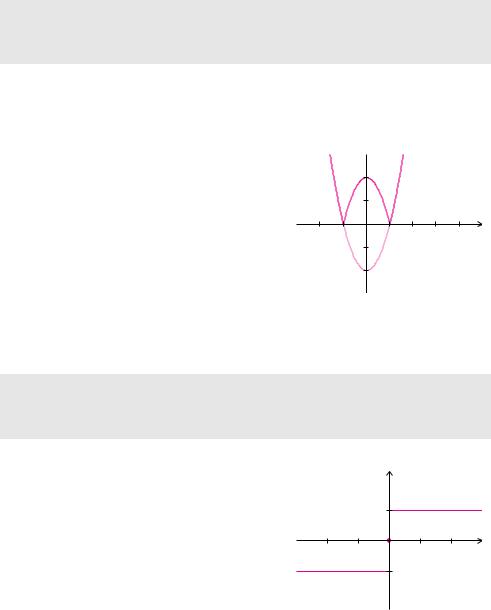
Beispiel 5.17 (Funktion skalieren in y)
Die Funktion |
|
|
|
|
|
|
|
|
|
|
|
y |
|
|
|
f(x) = |
1 |
3 |
− |
1 |
|
2 |
− |
3 |
|
|
|
2 |
|
˜ |
|
|
|
|
|
|
f(x) |
||||||||||
4 x |
|
4 x |
|
2 x |
|
|
1 |
|
|
|
|||||
soll um den Faktor 4 in y skaliert werden. Dazu wird |
−3 −2 −1 |
|
|
3 x |
|||||||||||
|
|
|
3 |
|
|
|
|
|
|
|
|
1 |
2 |
||
die Funktionsgleichung mit diesem Faktor multipli- |
−1 |
|
|
|
|||||||||||
ziert: |
|
|
|
|
|
|
|
|
|
|
|
|
f (x) |
|
|
f˜ x |
|
|
4 f |
x |
) |
|
|
|
|
|
−2 |
|
|
|
|
( ) = |
|
3x3( |
|
x2 |
− |
6 |
x. |
|
|
|
Ì |
||||
|
= |
3 |
− 3 |
|
|
|
|
|
|||||||
166 |
5 Funktionen |
Ein wichtiger Spezialfall der Skalierung ist die Achsenspiegelung. Bei einer Spiegelung an der x-Achse skaliert man die y-Werte und bei einer Spiegelung an der y-Achse skaliert man die x-Werte mit dem Faktor −1.
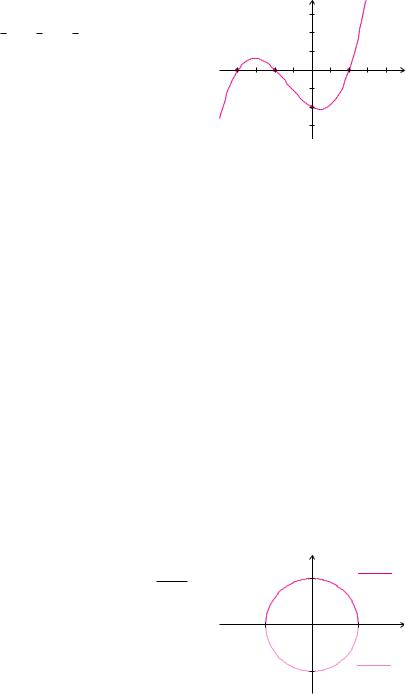
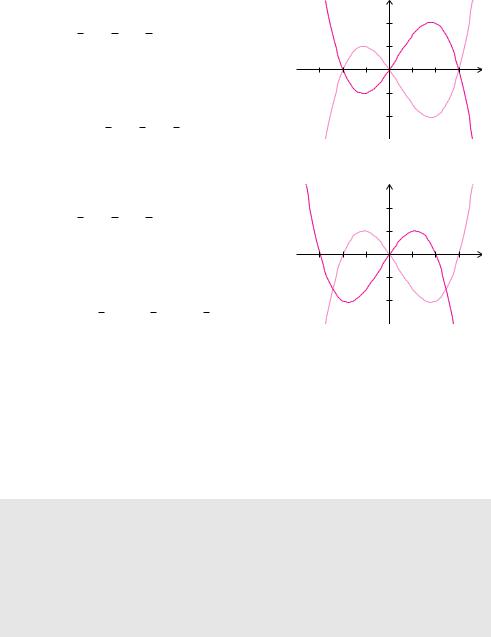
Beispiel 5.18 (Funktion spiegeln an x-Achse)
Die Funktion |
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
|
˜ |
|
|
1 |
|
|
1 |
|
− |
3 |
|
|
|
|
|
|
|
|
|
f(x) |
|
|
3 |
|
2 |
|
|
|
|
|
|
|
2 |
|
|
|
|
||||
f(x) = 4 x |
|
− 4 x |
|
2 x |
|
|
|
|
|
|
|
1 |
|
|
|
|
||
soll an der x-Achse gespiegelt werden. Dazu multi- |
|
|
|
|
|
|
|
|
||||||||||
man die Funktionsgleichung mit |
− |
1: |
3 |
2 |
1 |
1 |
2 |
3 |
x |
|||||||||
pliziert f˜ x |
|
|
f x |
|
|
|
|
|
|
− |
− |
− |
−1 |
|
|
|
|
|
( ) = − |
1(x3) |
1 x2 |
+ |
3 x. |
|
|
|
|
|
−2 |
f (x) |
|
Ì |
|||||
= |
− |
4 |
+ 4 |
|
2 |
|
|
|
|
|
|
|
|
|
||||
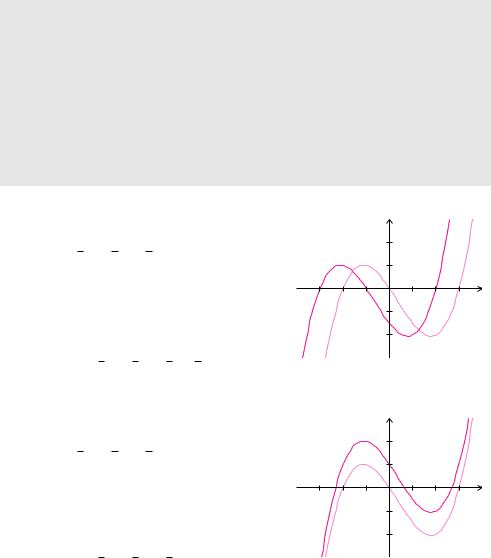
Beispiel 5.19 (Funktion spiegeln an y-Achse)
Die Funktion |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
|
|
|
|
1 |
3 |
− |
1 |
2 |
|
3 |
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
f(x) = 4 x |
|
4 x |
|
− 2 x |
|
|
|
|
|
|
|
|
|
|
1 |
f˜(x) |
|
|
|||
soll an der y-Achse gespiegelt werden. Dazu ersetzt |
|
|
|
|
|
|
|
|
|||||||||||||
der Funktionsgleichung x durch |
− |
x: |
3 |
2 |
1 |
1 |
2 |
3 |
x |
||||||||||||
man in f˜ x |
f |
x |
|
|
|
|
|
|
|
|
− |
− |
− |
−1 |
|
|
|
|
|||
( ) = |
|
1(− x) |
3 |
1 |
x |
) |
2 |
− |
3 |
|
x |
|
|
|
−2 |
f (x) |
|
|
|
||
= |
|
4 (− ) |
|
− 4 (− |
|
|
2 |
(− ) |
|
|
|
|
|
|
|
|
|||||
= − |
1 |
|
3 |
− |
1 |
|
2 |
+ |
3 |
|
|
|
x |
|
|
x |
|
|
x. |
Ì |
|||
4 |
|
4 |
|
2 |
|||||||
Translation und Skalierung sind Spezialfälle eines allgemeinen Prinzips, der sogenannten Komposition von Funktionen. Bei einer Komposition wird eine Funktion in eine andere Funktion eingesetzt. Ein Beispiel für eine verkettete Funktion ist der Heizölpreis. Der Rohölpreis wird in US-Dollar angegeben. Wir bezahlen unser Heizöl aber in Euro. Für uns ist somit die Verkettung der beiden Funktionen Ölpreis in Abhängigkeit vom US-Dollar und US-Dollar in Abhängigkeit vom Euro entscheidend.
Definition 5.10 (Komposition)
Unter der Komposition der Funktionen g und h versteht man die Nacheinanderausführung
f(x) = g(h(x)), f = g ○ h
der beiden Funktionen. Man wendet die äußere Funktion g auf das Ergebnis der inneren Funktion h an und erhält somit die zusammengesetzte Funktion f.