

Краткие выводы о рабочих характеристиках автопогрузчиков с механическим приводом
Как уже говорилось в начале этой главы, предлагается широкий спектр автопогрузчиков для нужд складского хранения. Поэтому важно знать и понимать все вилы продукции, и какой вклад они могут внести в процессы хранения и распределения.
|
Грузоподъемность (фунтов) |
Ширина проходов (футов)* |
Подъемная высота (дюймов) |
Подъемная скорость (порожняком) футов в минуту |
Скорость движения (миль в час) |
Квадратных футов на хранящуюся паллету |
С противовесом, с сидящим оператором |
2000 - 10000 |
12- 15 |
264 |
70 |
6,0 |
10,06 |
С противовесом, со стоящим оператором |
2000 - 6000 |
10- 12 |
240 |
85 |
7,0 |
9,56 |
С выносными опорами |
2000 - 6000 |
7-9 |
330 |
102 |
7,0 |
7,58 |
С выдвижным грузоподъемником |
2000 - 5000 |
7-9 |
400 |
102 |
7,0 |
7,83 |
С удлиненным грузоподъемником |
2000 - 3000 |
8- 10 |
400 |
94 |
7,0 |
6,72 |
С оператором внизу, с поворот-ным подъемным устройством |
3000 - 4000 |
5-7 |
480 |
100 |
7,0 |
6,84 |
С оператором наверху, с поворотным подъемным устройством |
3000 - 4000 |
5-6 |
480 |
60 |
6,0 |
6,84 |
Боковой погрузчик |
2000 - 10000 |
5-8 |
432 |
50 |
5,4 |
- |
С качающейся мачтой |
2000 - 10000 |
5-6 |
360 |
50 |
6,4 |
6,59 |
Передвигающийся в четырех направлениях |
2000 - 3000 |
8- 10 |
270 |
90 |
6,0 |
- |
Гибридный |
2000 - 4000 |
5,00 |
690 |
60 |
5,5 |
6.43 |
Высотный подъемник-загрузчик |
2000 - 4000 |
4,00 |
360 |
60 |
6,5 |
- |
* Ширина прохода определяется конкретными размерами груза и методом обработки в системах по 4 паллеты в высоту
Будущее
А в будущем, какие будут проекты автопогрузчиков? Во-первых, давайте подумаем, какие моменты будут важны для пользователей. Прежде всего – это эргономика, в том, что касается комфорта оператора, техники безопасности и производительности. Мы увидим непрерывное улучшение регуляторов, передвижения и размещения. Кабины и сиденья будут с большей гибкостью, больше внимания будет уделяться обзору, снижению шума, более мягкой окраске и плавным очертаниям, и другим эстетическим улучшениям, которые увеличивают общую приемлемость погрузчика для оператора.
Производительность будет оставаться важным фактором. Для достижения улучшений в этой области, потребуется больший акцент на надежности, удобстве обслуживания и доступности погрузчиков. Улучшения в эргономике и производительности улучшат одновременное и интуитивное управление функциями.
Ожидания заказчиков будут увеличиваться, а ценовая конкуренция приведет к необходимости сдерживания затрат. Это означает, что изготовители будут искать новые материалы, улучшенные процессы и проекты.
С точки зрения применения, будет больший акцент на решениях и конкретных улучшениях систем, таких как большая пропускная способность или сокращение эксплуатационных расходов. Стремление к увеличению оборота товарных запасов приведет к большему применению в хранении подхода «точно в назначенное время», когда в некоторых областях потребуется больше транспортировки, чем хранения, что в свою очередь изменит конструкцию автопогрузчиков. Забота об окружающей среде потребует поиска вариантов топлива.
Проекты автопогрузчиков будут продолжать эволюционировать в соответствии с нуждами потребителей, используя достижения информационных технологий 21 века.
Приложение 22.1
Вычисление минимальной ширины проходов
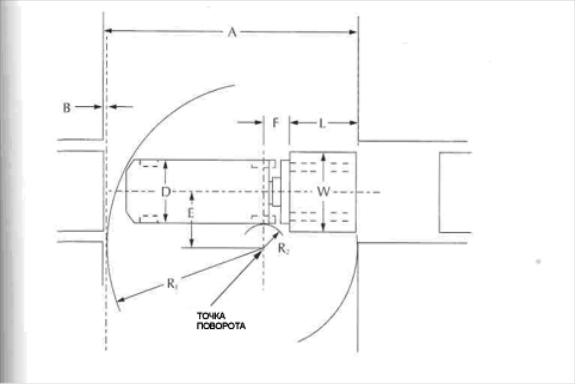
Данная формула может применяться для транспортных средств с противовесом, чтобы вычислять минимальную ширину проходов (со стеллажами и штабелями, расположенными под прямым углом к проходам) при одном или двух поворотных задних колесах, и при узких грузах:
A = Минимальная ширина прохода,
E = ½ общей ширины погрузчика плюс внутренний радиус поворота (R2),
B = Допуски для данного применения и рулевого управления (проконсультируйтесь с изготовителем),
F = Расстояние от лицевой поверхности груза до осевой линии привода или груза,
Rj = Внешний радиус поворота (погрузчик порожняком при небольшой скорости движения),
L = Длина груза,
W= Ширина груза
Когда "W" не больше, чем 2E, то используем:
Рис. 22.7 Вычисление минимальной ширины проходов
A = Rj + F + L+B
Приложение 22.2
Вычисление угловых допусков и возможностей по преодолению пандусов
Две различных концепции имеют значение при определении, смогут ли погрузчики работать в данном применении с рампой (пандусом).
Нужно различать угловые допуски и возможность по преодолению пандусов!
Угловые допуски относятся к максимальному изменению уклона, верхнему и нижнему, которое транспортное средство может преодолеть, порожняком или груженным, без контакта между полом и погрузчиком. Угловые допуски – это функция от колесной базы и подмостового габарита, и они не связаны с силой сцепления, возможностями двигателя или характеристиками тормозной системы погрузчика.
Чтобы определить угловые допуски:
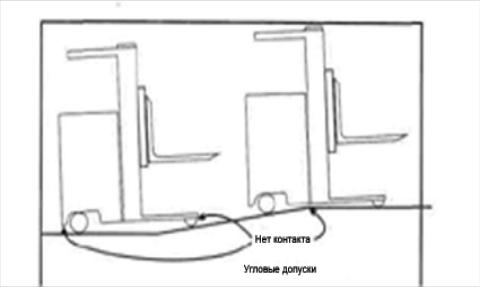
Рис. 22.8 Вычисление угловых допусков
Когда уклон больше, чем колесная база погрузчика:
"P _ Автомобиль подмостовой габарит X 2 Колесная база/2
Когда уклон is меньше чем автомобиль колесная база:
"" _ Подмостовой габарит oc —
Колесная база/2
Чтобы определить процент уклона рампы:
Шаг 1 – Измерьте вертикальный подъем и длину по горизонтали.
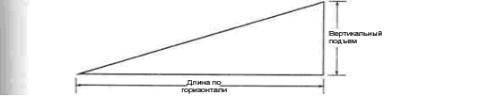
Шаг 2 - Разделите подъем на длину и умножьте на 100. Полученный ответ будет процентом уклона.
Пример: Подъем по вертикали = 4 дюйма Длина по горизонтали = 48 дюймов
4 - 48 х 100% = 0,083 х 100% = 8,3% уклона. Чтобы преобразовать процент уклона в угол наклона используйте следующую таблицу:
Процент уклона Угол наклона |
18 10,2 |
15 8,5 |
14 8,0 |
12 6,8 |
11 6,3 |
10 5,7 |
8 4,6 |
4 2,3 |
Таблица 22.8 Преобразование процента уклона в угол наклона
Приложение 22.3
Спецификации пола для управляемых систем
Учитывайте и горизонтальное расположение, и гладкость в спецификациях пола.
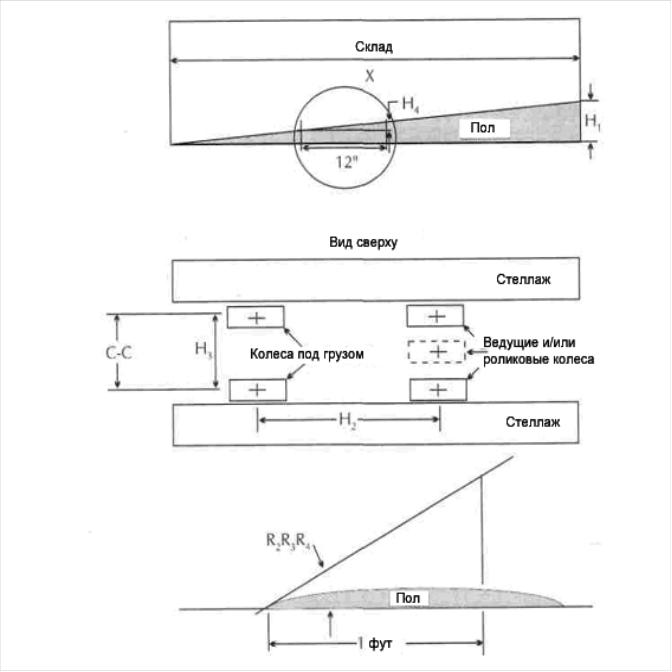
Рис. 22.9 Спецификации пола для управляемых систем
"H" фактор – относится к горизонтальному расположению пола, изменение высоты пола от одной точки к другой,
"R" фактор - относится к степени изменения от одной точки к другой, иначе говоря, гладкость пола.
Рекомендации по оптимизации работы оборудования для очень узких проходов
На обработанной поверхности пола:
Разница высот между любыми двумя точками не превышает H.
Разница высот между любыми двумя точками, разделенными колесной базой автопогрузчика, не превышает H2 и не изменяется больше чем на R2 на фут движения по полу.
Разница высот между любыми двумя точками, разделенными колеей шасси (от центра до центра) не превышает H3 и не изменяется больше чем на R3 на фут движения по полу.
Разница высот между любыми двумя точками на расстоянии в один фут друг от друга, не превышает H4 и не изменяется больше чем на R4 на фут движения по полу.
Примечание: дополнительные характеристики, такие как вес груза, единообразие груза (нет выступающих частей), отвесное положение стеллажей и общие требования к пропускной способности могут оказать воздействие на рекомендуемые спецификации пола.
Спецификации пола пишутся для двух типов полов: со случайным движением или с определенным движением. Пол со случайным движением предлагает неограниченные варианты движения, например, в офисных зданиях, розничных магазинах и обычных складах. Пол с определенным движением ограничивает движение по фиксированным колеям, например, при управляемых системах в очень узких проходах. На сегодняшний день существуют стандарты спецификаций только для полов со случайным движением (Американский институт бетона).
23
Конвейеры для единичных грузов
Брайан Санфорд
Президент компании «Rapistan Demag», г. Гранд-Рапидс, штат Мичиган
Введение
Конвейеры для единичных грузов предназначены для обработки изделий, которые могут находиться в коробках, посылках, пакетах, тюках, на паллетах, площадках для груза или в виде отдельных изделий. Пропускная способность конвейера измеряется в "изделиях в минуту".
Конвейеры для единичных грузов уже давно являются наиболее значительным элементом обработки материалов в заводской механизации. Появление миникомпьютеров (в начале 1960 гг.) сильно расширило использование конвейерной автоматизации, как на производственных, так и на распределительных складах. Уже тогда конвейеры были способны транспортировать отобранные для заказов товары от удаленных участков склада к местам ручной сортировки, упаковки и отгрузки. С появлением этикеток с кодом, способных придать индивидуальность каждому обрабатываемому изделию, и устройств сканирования этикеток, способных быстро узнавать каждое изделие, конвейеры могут быть спроектированы для сканирования, сортировки, буферного хранения и доставки каждого изделия к его пункту отгрузки. Скорость, точность и экономичность, с которой конвейеры для единичных грузов и их системы управления выполняют эти функции плюс их возможность запоминать и сообщать о месте нахождения каждого обрабатываемого изделия, сделали конвейерные системы основным компонентом современных глобальных логистических каналов распределения.
В 1995 продажа конвейерных систем в Северной Америке превысила $ 1,4 миллиарда. Около половины из этих конвейеров использовались в высокоавтоматизированных системах на распределительных складах, операциях по обработке посылок и других грузов. Вторая половина использовалась больше чем на 100000 заводов, меньших по размерам складах, в операциях с почтовыми заказами, в небольших системах по обработке багажа, терминалов для посылок и груза, и в кладовых розничных магазинов.
В сущности, те же самые типы конвейеров используются в системах всех размеров, и больших и небольших. Принципы выбора конвейеров достаточно легко понять. Здравый смысл – это необходимый талант для профессионала.
Эта глава начинается с первоначальных проектных соображений. Необходимо все тщательно обдумать до любых попыток применения конвейеров. Неудачи в применении конвейерных систем обычно вызваны недостаточно точным определением требований.
В первом разделе об оборудовании, посвященном конвейерам без механического привода, исследуется строительство и использование дисковых конвейеров и роликовых конвейеров. Эти ролики и каркасы конвейеров станут компонентами оборудования с механическим приводом, которое будет описываться дальше. В следующем разделе, посвященном конвейерам с механическим приводом для упаковки и обработки легких паллет, обсуждаются ленточные конвейеры, несколько типов приводных роликовых конвейеров и цепных конвейеров плюс краткий обзор сортировочных конвейеров. В последнем разделе, посвященном конвейерам с механическим приводом для обработки тяжелых единичных грузов, описываются усиленные с механическим приводом роликовые и цепные конвейеры. Данная глава посвящена основному конвейерному оборудованию, а не проектам систем.
Первоначальные проектные соображения
Опытные профессионалы по применению конвейеров рассматривают следующие требования, прежде чем переходить к выбору каких-либо типов конвейерного оборудования.
Транспортабельность
Представьте себе шар для боулинга, пару лыж, свитер в пластиковом пакете и пачку сигарет. У каждого изделия свои уникальные характеристики: сферический шар будет тяжелым и неустойчивым; лыжи будут необычно длинными; пакет со свитером будет плоским и недостаточно крепким для передвижения по жестким поверхностям; пачка сигарет будет очень небольшой по размерам и легкой по весу. Каждое из этих изделий является транспортабельным, но нельзя ожидать, чтобы одна конвейерная система могла транспортировать все эти изделия. Нужно реалистично оценивать транспортабельность каждого изделия. "Средняя" транспортабельность здесь не подходит; шар для боулинга будет вести себя как шар для боулинга. Любое изделие, которое нельзя должным образом перевозить на выбранном конвейерном оборудовании, должно классифицироваться как "нетранспортабельное" и транспортироваться с помощью других средств.