

Непрерывный контроль процесса достижеия цели - Гайдай А.А., Руссман И.Б
..pdfНЕПРЕРЫВНЫЙ КОНТРОЛЬ ПРОЦЕССА ДОСТИЖЕНИЯ ЦЕЛИ
Гайдай А.А., Руссман И.Б.
(Воронежский Государственный Университет)
В данной работе рассматривается проблема контроля за дея- тельностью системы, движущейся к поставленной цели. Пусть исполнительному объекту ставится задача (например, руково- дством предприятия) достичь к заданному моменту определённого значения какого-либо показателя (например, получить заданный доход или произвести требуемый объём продукции), после этого система начинает двигаться к цели по какой-либо траектории. Если выяснится, что достижение цели оказывается невозможным, то требуется обнаружить это как можно раньше и так изменить пара- метры цели, чтобы она стала достижимой. Это изменение может
выражаться в уменьшении количественной оценки планового результата, в увеличении времени на его достижение, или в том и другом одновременно. Задачей системы контроля будет являться оценка текущего состояния системы, объёма выполненных работ, риска невыполнения плана, а также близости состояния системы к критической области, откуда достижение цели будет невозможно при любых допустимых затратах. Помимо этого система контроля является одновременно и системой перепланирования.
Допустим, что за время tпл нам нужно добиться результата, количественное выражение которого есть Aпл . При этом известно,
что существует минимальная скорость производства результата во времени vmin и максимальная скорость vmax (см. рис.1). Важно
найти точки контроля за состоянием объекта, выполняющего рабо- ту, которые могут быть моментами времени, когда необходимо
принять решение об управляющем воздействии или пересмотре параметров цели. Если в процессе движения объект попадает в область, лежащую ниже прямой MN на рисунке, то достижение цели в заданное время станет невозможным, поэтому эта область становится запретной, и приближение к ней надо рассматривать
1
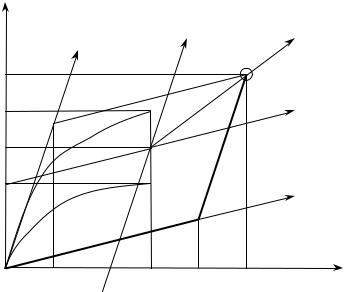
как угрозу невыполнения задачи. Контроль объекта должен быть организован таким образом, чтобы можно было вовремя вмешаться в деятельность объекта, если его состояние приближается к опас- ной зоне.
Организация системы контроля должна удовлетворять двум противоречивым требованиям: с одной стороны, точек контроля должно быть достаточно много, т.к. при отсутствии должного контроля мы можем оказаться в ситуации, когда что-либо менять уже поздно. С другой стороны, за проведение контроля приходится платить, поэтому точек контроля должно быть как можно меньше.
A
|
|
|
vmax |
vmax |
|
|
v* |
Aпл |
|
|
|
|
M |
|
|
|
|
|
|
|
|||
|
|
|
E3 |
|
|
(Aпл,tпл ) |
|
|
|
|
|
|
|||
|
|
|
|
|
|
F1 |
vmin |
A |
|
|
|
|
|||
~ |
|
|
|
F2 |
|
||
|
P |
|
|
|
|
||
A |
F3 |
|
|
|
|
||
A |
|
|
|
|
vmin |
||
|
|
|
|
|
|||
|
|
|
E2 |
N |
|
|
|
|
|
t0 |
E1 t |
t1 |
|
tпл |
t |
0 |
|
|
|||||
Рис.1.
В работах [1] и [2] рассматривается эта задача и способ её ре- шения, позволяющий найти моменты времени, когда необходимо проводить контроль состояния объекта. Рассмотрим видоизменён- ную постановку этой задачи, а именно: пусть контроль – это не
2
разовая операция, а непрерывная, и в каждый момент времени нам нужно принимать решение об «интенсивности» контроля на теку- щий момент. Наша задача состоит в том, чтобы для каждого мо- мента времени выяснить необходимую «жёсткость» проводимого контроля, т.е. требуемую точность оценки объёма выполняемой работы, а также скорости её выполнения. Побочным эффектом
решения данной проблемы будет возможность для любого момента времени узнать текущую трудность достижения цели, а также степень риска невыполнения плана. Поясним, что это означает.
Пусть v~(t) – оцениваемая мгновенная скорость движения
объекта к цели в момент t, v~(t) [vmin , vmax ]. Пусть она известна с некоторой точностью v(t) :
|
|
|
|
~ |
|
|
v(t) |
|
|
|
|
|
|||||
|
|
v(t) = v (t) + |
2 |
|
||||
(1) |
|
|
|
|
|
|
, |
|
~ |
|
|
v(t) |
|
||||
|
|
v(t) = v (t) − |
2 |
|
||||
где |
|
(t) и v(t) |
- соответственно, верхняя и нижняя оценки скоро- |
|||||
v |
||||||||
сти в момент t, |
|
(t),v(t) [vmin ,vmax ], причём |
||||||
v |
||||||||
(2)v(t) = (vmax − vmin )δ(t) ,
δ(t) – относительная точность измерения скорости, δ(t) [0,1].
Именно эту величину мы и будем считать «интенсивностью» кон- троля, и наша задача будет состоять в нахождении этой величины как функции от времени t. Для любого момента t мы можем оце- нить текущую «трудность» (вероятность недостижения цели) следующим образом:
(3) d(t) = |
v* (t) − v |
min |
, v*(t) = |
A − A(t) |
|
|
|
|
пл |
. |
|||
vmax |
|
|
tпл − t |
|||
|
− vmin |
|
||||
Здесь d(t) – трудность достижения цели в момент t, v* (t) - ми- нимальная постоянная скорость, с которой необходимо двигаться из текущей точки (t, A(t)), чтобы выполнить плановый объём
работ в срок (см. рис.1). Т.о., за вероятность достижения цели для текущей точки мы принимаем отношение длины отрезка возмож-
3
ных скоростей к длине отрезка приемлемых скоростей (двигаясь с которыми постоянно, можно выполнить задание не позже отведён- ного срока).
Тогда
~ |
|
t ~ |
|
|
|
|
|
|
|
|||||
|
A(t) = òv (t)dt |
|
|
|
|
|
|
|
||||||
|
|
|
0 |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
t |
|
|
t |
æ~ |
|
vmax - vmin |
ö |
|||
(4) A(t) = òv(t)dt = ò |
|
|||||||||||||
çv (t) |
+ |
|
d(t)÷dt , |
|||||||||||
2 |
||||||||||||||
|
|
|
0 |
|
|
0 |
è |
|
|
|
ø |
|||
|
|
|
|
t |
t |
æ~ |
|
vmax - vmin |
ö |
|||||
|
A(t) = òv(t)dt = ò |
çv (t) |
- |
|
d(t)÷dt |
|||||||||
|
2 |
|||||||||||||
~ |
|
0 |
|
|
0 |
è |
|
|
|
ø |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
A(t) и A(t) |
– оценки проделанной работы к моменту t, |
||||||||||||
где A(t) , |
||||||||||||||
|
|
|
~ |
|
|
|
|
|
|
|
||||
|
|
|
|
v(t) и |
v(t) соответственно. Нас будет |
|||||||||
рассчитанные по v (t) , |
||||||||||||||
интересовать худший случай, |
т.е. A(t) . |
Для точки (t, A(t)) мы |
||||||||||||
можем найти соответствующую минимальную постоянную ско- рость, необходимую для достижения цели:
|
|
~ |
v |
|
|
- v |
|
t |
|
|
|
|
max |
min |
òd(t)dt |
|
|||||
|
|
|
Aпл - A(t) + |
|
|
|
||||
(5) v* (t) = |
Aпл - A(t) |
= |
|
|
2 |
|
|
|||
|
|
|
|
0 |
. |
|||||
tпл - t |
|
tпл |
- t |
|
||||||
|
|
|
|
|
|
|||||
Для любого момента t будем задавать необходимую точность измерения скорости следующим образом:
(6)δ(t) = 1− d(t) .
Смысл этого выражения в том, что чем больше риск недости- жения цели в текущий момент времени, тем больше мы должны затрачивать усилий на контроль состояния объекта, т.к. объект приближается к опасной границе, выйдя за которую, он уже не
сможет выполнить поставленный объём работ за время tпл . Поэто-
му желательно в таких случаях знать состояние объекта с возмож- но большей точностью, чтобы, например, вмешаться в поведение объекта, скорректировать задание и т.п., если величина риска (трудность достижения цели) превысит некоторую заданную вели- чину. В то же время, если состояние объекта оценивается как впол-
4

не благополучное (т.е. риск невыполнения работы невелик), то
совершенно незачем затрачивать лишние средства на контроль объекта и проверку хода выполнения задания. Заметим, что это
лишь один из возможных вариантов выбора точности измерения δ(t) в зависимости от трудности d(t). В общем случае формулу (6)
можно записать так: δ(t) = Ψ(d(t)) , где Ψ(x) [0,1] при x [0,1] и Ψ(0) = 1, Ψ(1) = 0 .
Рассмотрим пример, иллюстрирующий вышеизложенное. До- пустим, в какой-то момент руководитель проекта пожелает узнать его текущее состояние. Пусть ему уже известен некоторый интер-
вал, в котором находится текущий объём работ [A(t), A(t)], кото-
рый можно рассчитать исходя из данных контроля за предыдущие дни. Чтобы оценить текущую скорость выполнения проекта v~(t) ,
руководитель может просто спросить подчинённых (например, начальников подчинённых отделов), какой объём работ был вы- полнен за этот день. Затраты на получение такой информации близки к нулю, но и её точность также невелика. Чтобы повысить точность, можно потребовать у одного или нескольких подчинён- ных отделов предоставить более полный отчёт, но при этом при- дётся понести определённые затраты на его подготовку, анализ и проверку. Однако, очевидно, такую проверку придётся проводить, если выяснится, что велик риск невыполнения проекта в срок.
Вернёмся к нахождению требуемой точности измерения ско- рости движения к цели. Подставив в выражение (6) формулы (3) и (5), получим интегральное уравнение для δ(t) :
~ |
v |
|
- v |
|
t |
|
|
|
max |
min |
òd(t)dt |
|
|
||||
|
Aпл - A(t) + |
|
|
|
|
|||
|
|
2 |
|
- vmin |
||||
|
|
|
|
0 |
||||
|
|
|
|
|
||||
(7) d(t) = 1- |
|
tпл - t |
|
|
||||
|
|
|
|
. |
||||
|
|
vmax - vmin |
|
|||||
|
|
|
|
|
||||
Продифференцировав по t, а также учитывая, что ~¢
A (t)
получим линейное дифференциальное уравнение:
|
|
1 |
æ |
d(t) |
~ |
ö |
|
(8) d¢(t) = |
|
ç |
- |
vmax - v (t) |
÷ |
||
|
|
|
|
||||
|
tпл |
|
ç |
2 |
|
vmax - vmin |
÷ |
|
- t è |
|
ø |
||||
=~
v(t) ,
5

с начальным условием:
vmax - Aпл
(9) d(0) = 1- d(0) = tпл .
vmax - vmin
Решая это уравнение, получаем:
|
|
|
|
æ |
|
|
ö |
t |
~ |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
||||||||||
|
|
|
ç |
|
|
Aпл ÷ |
- ò |
(vmax - v (t)) |
|
|
|
||||||
|
|
|
tпл çvmax - |
|
|
÷ |
|
|
|
|
dt |
|
|||||
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
tпл - t |
|
||||||||||
(10) d(t) = |
|
è |
|
|
tпл ø |
0 |
|
|
. |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
tпл |
- t (vmax |
- vmin ) |
|
||||||||||||
|
|
|
|
|
|
|
|
||||||||||
Заметим, что если в какой-то момент времени t0 |
окажется, что |
||||||||||||||||
d(t0 ) =1 , |
то это означает, что дальнейший контроль не нужен, |
||||||||||||||||
поскольку |
d(t0 ) = 0 , и |
объект |
достигнет цели в |
планируемые |
|||||||||||||
сроки, даже двигаясь с минимальной скоростью. Если же в момент t1 будет выполнено d(t1 ) < 0, то объект мог к этому моменту
войти в запрещённую зону, и достижение цели может оказаться невозможным.
Рассмотрим частный случай, когда оцениваемая скорость дви-
|
|
|
|
|
|
~ |
|
vmax + vmin |
|
|
жения постоянна и равна средней: v (t) º |
|
. Тогда |
||||||||
2 |
||||||||||
|
|
|
|
|
|
|
|
|
||
|
|
|
æ |
Aпл / tпл |
ö |
|
|
|||
|
|
|
|
|
||||||
(11) d(t) = 1- |
tпл |
ç |
- vmin |
÷ . |
|
|
||||
|
|
|
|
|
||||||
|
|
ç |
|
÷ |
|
|
||||
|
|
tпл - t è |
vmax - vmin ø |
|
|
|||||
Найдём для этого случая величины t0 и t1 . Подставляя d(t0 ) =1 в
|
|
|
æ |
Aпл / tпл - vmin |
|
|
|
|
|||
(11), получаем, что |
tпл |
ç |
|||
|
|
||||
|
|
ç |
vmax - vmin |
||
|
|
tпл - t è |
|||
ö
÷ = 0 , а значит, если
÷
ø
задача не тривиальна и достижение цели за время tпл невозможно даже при постоянном движении с минимальной скоростью, то контроль прекращать нельзя. При d(t1 ) = 0 получаем
(12)
6
|
|
æ |
æ |
ö2 |
ö |
|
t |
= t |
ç1 |
- ç |
Aпл / tпл - vmin |
÷ |
÷ . |
|
||||||
1 |
|
пл ç |
ç |
÷ |
÷ |
|
|
|
è |
è |
vmax - vmin ø |
ø |
|
Существует альтернативный подход к вычислению количест- венной оценки трудности достижения цели. Если μ (0,1] – без- размерная оценка качества некоторого ресурса (чем больше, тем лучше), а ε [0,1) – нижняя граница требований к качеству ресур- са, то трудность можно задать так (см. [3]):
=e(1 - m)
(13)d m(1 - e) ,
при этом d [0,1] при выполнении условия m ³ e , т.е. если ресурс
является допустимым. Заметим, что в формуле (3) мы не учитыва- ем ещё одну особенность рассматриваемой задачи. Из области, лежащей ниже прямой ON на рис.1, мы теоретически могли бы достичь цели в плановый срок. Тем не менее, минимальная ско- рость производства результата может пониматься как оценка на- дёжности объекта, движение с ещё меньшей скоростью может происходить в случае возникновения маловероятных чрезвычай- ных обстоятельств, которые могут привести к разрушению самого объекта. Именно поэтому количественная оценка риска должна возрастать также и при приближении объекта к отрезку ON. Тогда для рассматриваемой задачи с учётом вышеприведённого замеча- ния трудность может быть вычислена следующим образом:
d = max(d |
, d |
|
), |
|
|
|
|
|
|
|
|
|
|
|
d |
|
= |
e (1- m |
) |
= |
|
E1E2 |
|
× |
|
E3P |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
где |
|
|
|
1 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
, |
|||||||||||
|
|
|
|
E P |
|
|
|
E |
E |
|
|
||||||||||||||||||||||||||
|
|
1 |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
m |
(1- e |
) |
|
|
× |
3 |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
1 |
|
|
|
1 |
|
|
2 |
|
|
|
|||||
d2 |
= |
e2 (1 - m2 ) |
= |
|
|
F1F2 |
|
× |
|
F3P |
|
|
, что после подстановки |
дает |
сле- |
||||||||||||||||||||||
|
|
|
|
|
|||||||||||||||||||||||||||||||||
|
|
|
|
||||||||||||||||||||||||||||||||||
|
|
F1P |
|
|
|
F2 F3 |
|
|
|||||||||||||||||||||||||||||
m2 (1 - e2 ) |
|
× |
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
дующую формулу для d(t):
d(t) = max(d1(t),d2 (t))
|
vmin |
vmax t - A(t) |
(Aпл - vmintпл - t(vmax |
- vmin )) |
|
|||||
(14) d1(t) = |
|
vmax - vmin |
. |
|||||||
|
|
A(t)(Aпл - vmintпл + A(t) - vmax t) |
|
|||||||
|
|
|
|
|
||||||
|
|
vmax t - A(t) |
(A(t) - Aпл - vmintпл + vmint) |
|
||||||
d2 (t) = |
vmax |
- vmin |
|
|||||||
|
|
|
|
|
|
|||||
|
(tпл - t)(vmax tпл - Aпл ) |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|||
7
Подставляя в (14) вместо A(t) величину A(t) из (4), с учётом
~′ = ~
(6) и условия A (t) v (t) , мы можем получить дифференциальное
уравнение для данного вида оценки трудности. В виду громоздко- сти получающихся конструкций, мы не будем их здесь приводить.
В качестве возможного расширения данной задачи в её поста-
новку можно ввести управление и рассматривать два варианта задачи оптимального управления – с конечным числом точек кон- троля состояния объекта и с непрерывным контролем, где в качест-
ве цели будет рассматриваться минимизация затрат на достижение цели в отведённое время, и задача будет состоять в нахождении оптимальной траектории движения объекта к цели.
Литература
1.БАБУНАШВИЛИ, М.К., БЕРМАНТ М.А., РУССМАН И.Б.
Контроль и управление в организационных системах / Экономика и математические методы. М.: Наука, 1969. Том 5, вып. 2. С. 212-227.
2.БАБУНАШВИЛИ, М.К., БЕРМАНТ М.А., РУССМАН И.Б.
Оперативное управление в организационных системах / Экономика и математические методы. М.: Наука, 1971. Том 7, вып. 3. С. 377-
3.КАПЛИНСКИЙ А.И., РУССМАН И.Б., УМЫВАКИН В.М.
Моделирование и алгоритмизация слабоформализованных задач выбора наилучших вариантов систем. Воронеж: Изд-во ВГУ, 1991.
– 168 с.
8