

Обчислення азимута
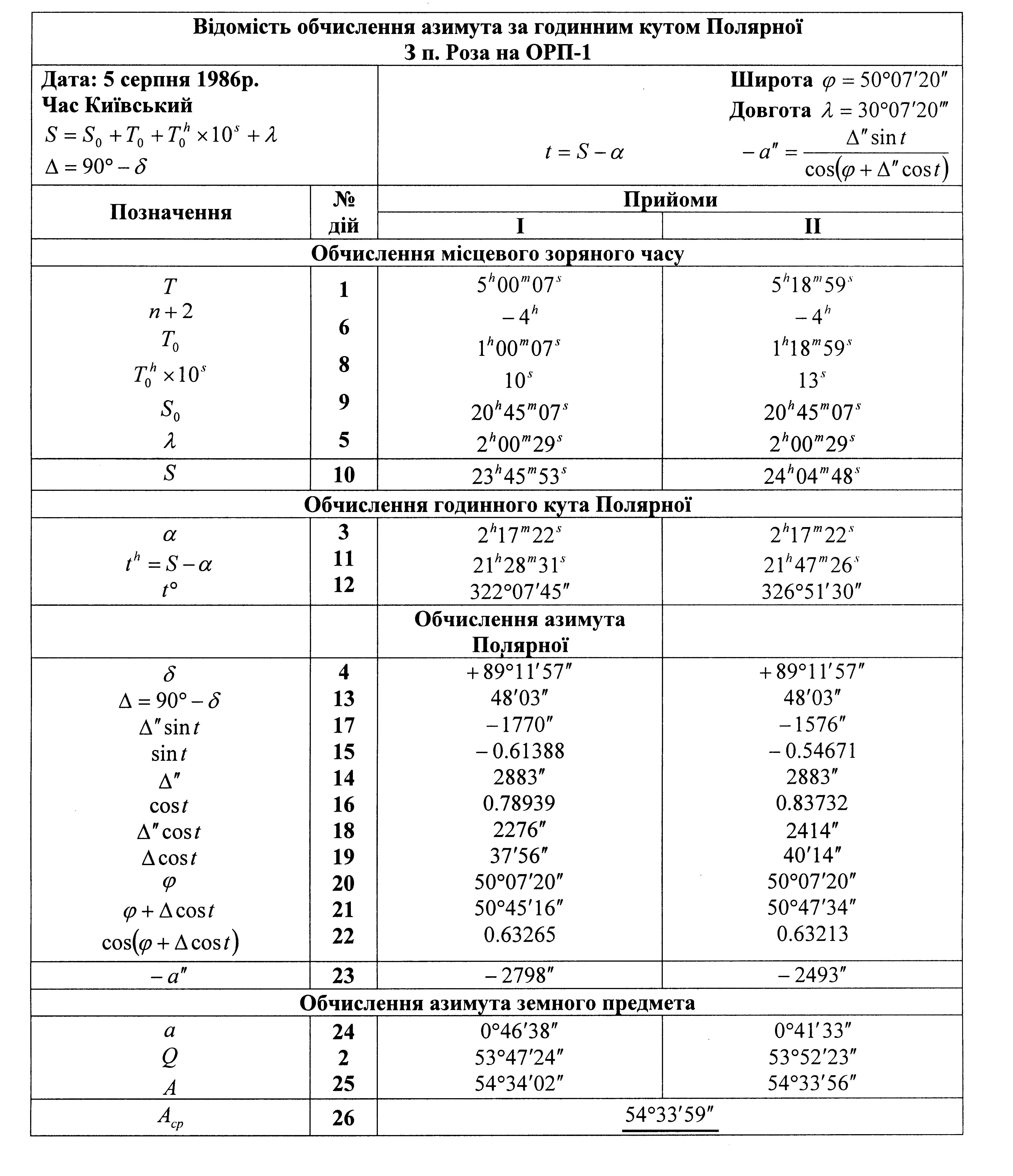
Порядок обчислення азимута за годинним кутом Полярної (табл.36) наступний:
Обчислюють
всесвітній час
![]() .
.![]() ,
,![]() – номер годинного поясу. Якщо
– номер годинного поясу. Якщо![]() менше
менше![]() то до нього слід додати
то до нього слід додати![]() .
.
Обчислюють
величину
![]() .
.![]() ,
де величину
,
де величину![]() беруть в годинах з точністю до
беруть в годинах з точністю до![]() .
.
Обчислюють
місцевий зоряний час “![]() ”
за формулою
”
за формулою![]() ,
де
,
де![]() – зоряний час в
– зоряний час в![]() всесвітнього часу (вибирається із
Астрономічного щорічника);
всесвітнього часу (вибирається із
Астрономічного щорічника);
якщо
спостереження велось до
![]() години ночі за декретним часом, то
приймається дата минулого дня, а якщо
після
години ночі за декретним часом, то
приймається дата минулого дня, а якщо
після![]() години ночі, то приймається дата дня
який наступив;
години ночі, то приймається дата дня
який наступив;
![]() –номер
годинного поясу;
–номер
годинного поясу;
![]() –довгота
пункту спостереження.
–довгота
пункту спостереження.
Вибирають
із Астрономічного щорічника “![]() ”
(пряме сходження) і “
”
(пряме сходження) і “![]() ”
(схилення) Полярної зірки на дату
спостереження і обчислюють її полярну
відстань “
”
(схилення) Полярної зірки на дату
спостереження і обчислюють її полярну
відстань “![]() ”
за формулою
”
за формулою![]() .
.
О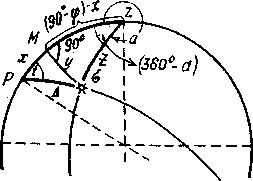 бчислюють
годинний кут Полярної зірки за формулою
бчислюють
годинний кут Полярної зірки за формулою![]()
Обчислюють
азимут “![]() ”
Полярної зірки.
”
Полярної зірки.
В
Рис.222![]() ”,
для цього розглянемо паралактичний
трикутник
”,
для цього розглянемо паралактичний
трикутник![]() (Рис.222), в якому світило
(Рис.222), в якому світило![]() є Полярною зіркою. Проведемо перпендикуляр
із
є Полярною зіркою. Проведемо перпендикуляр
із![]() до сторони
до сторони![]() ,
одержимо прямокутний трикутник
,
одержимо прямокутний трикутник![]() з сторонами
з сторонами![]() ,
,![]() ,
,![]() .
.
З
розв’язання трикутника
![]() за теоремою синусів, визначимо його
катети
за теоремою синусів, визначимо його
катети![]() і
і![]() .
.
Внаслідок
малої величини дуг “![]() ”
і “
”
і “![]() ”
синуси замінимо радіанною мірою.
”
синуси замінимо радіанною мірою.
Тоді ![]()
![]() (1)
(1)
Із
цього ж малого трикутника
![]() ,
вважаючи в ньому кут при вершині
,
вважаючи в ньому кут при вершині![]() рівним
рівним![]() ,
одержимо:
,
одержимо:
![]() звідси
звідси
![]() або
або
![]() (2)
(2)
Розглянемо
великий сферичний трикутник
![]() .
Із сферичної тригонометрії відомо, що
в прямокутному сферичному трикутнику
відношення тангенса одного із катетів
до тангенса протилежного кута дорівнює
синусу другого катета, тобто:
.
Із сферичної тригонометрії відомо, що
в прямокутному сферичному трикутнику
відношення тангенса одного із катетів
до тангенса протилежного кута дорівнює
синусу другого катета, тобто:
![]() або
або
![]() звідси
звідси
![]()
Внаслідок
малих величин “![]() ”
і “
”
і “![]() ”,
застосовуючи перехід до їх радіанної
міри, одержимо:
”,
застосовуючи перехід до їх радіанної
міри, одержимо:
![]()
Замінюючи
в цьому рівнянні
![]() і
і![]() їх значеннями із формул (1) і (2), одержимо:
їх значеннями із формул (1) і (2), одержимо:
![]()
Обчислюють азимут напряму на земний предмет.
![]()
Таблиця 36
§228. Відомості із загальної теорії гіроскопів
Визначення азимутів напрямів на земній поверхні за допомогою спеціальних геодезичних гіроскопічних приладів – гіротеодолітів і гірокомпасів одержало назву гіроскопічного орієнтування.
Г
Рис.223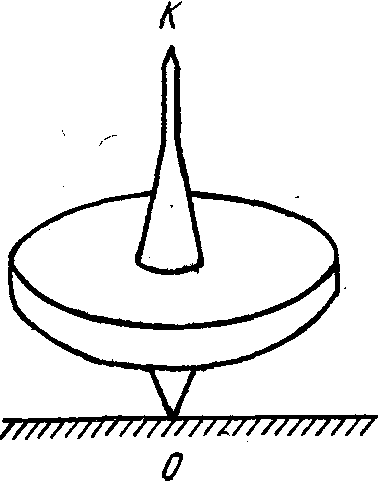
![]() і точки підвісу (опори) “
і точки підвісу (опори) “![]() ”.
Найбільш простим пристроєм є гіроскоп
в карданному підвісу (Рис.224). Ротор
обертається навколо своєї осі симетрії
”.
Найбільш простим пристроєм є гіроскоп
в карданному підвісу (Рис.224). Ротор
обертається навколо своєї осі симетрії![]() в підшипниках установлених у внутрішньому
кільці. Ця вісь називається головною
віссю гіроскопа. В свою чергу внутрішнє
кільце може вільно обертатися навколо
осі
в підшипниках установлених у внутрішньому
кільці. Ця вісь називається головною
віссю гіроскопа. В свою чергу внутрішнє
кільце може вільно обертатися навколо
осі![]() в підшипниках, установлених в зовнішньому
кільці. Вісь
в підшипниках, установлених в зовнішньому
кільці. Вісь![]() називається віссю чутливості. Накінець,
зовнішнє кільце також може вільно
обертатися навколо осі
називається віссю чутливості. Накінець,
зовнішнє кільце також може вільно
обертатися навколо осі![]() в підшипниках, установлених в нерухомій
основі. Вісь
в підшипниках, установлених в нерухомій
основі. Вісь![]() називається віссю прецесії. В такому
карданному підвісу ротор може виконувати
три незалежні обертальні рухи навколо
осей, які перетинаються в одній точці,
яка при русі ротора залишається нерухомою,
тобто кінематично є точкою підвісу
ротора так само, як точка
називається віссю прецесії. В такому
карданному підвісу ротор може виконувати
три незалежні обертальні рухи навколо
осей, які перетинаються в одній точці,
яка при русі ротора залишається нерухомою,
тобто кінематично є точкою підвісу
ротора так само, як точка![]() є точкою підвісу дзиґи. В таких випадках
кажуть, що ротор має три ступені свободи,
а гіроскоп такого типу називають
триступеневим. Дзиґа також має три
ступені свободи тому що його головна
вісь
є точкою підвісу дзиґи. В таких випадках
кажуть, що ротор має три ступені свободи,
а гіроскоп такого типу називають
триступеневим. Дзиґа також має три
ступені свободи тому що його головна
вісь![]() може нахилятися в будь-яку сторону, а
цей рух завжди можна розкласти на два
обертаючі рухи в взаємноперпендикулярних
вертикальних площинах.
може нахилятися в будь-яку сторону, а
цей рух завжди можна розкласти на два
обертаючі рухи в взаємноперпендикулярних
вертикальних площинах.
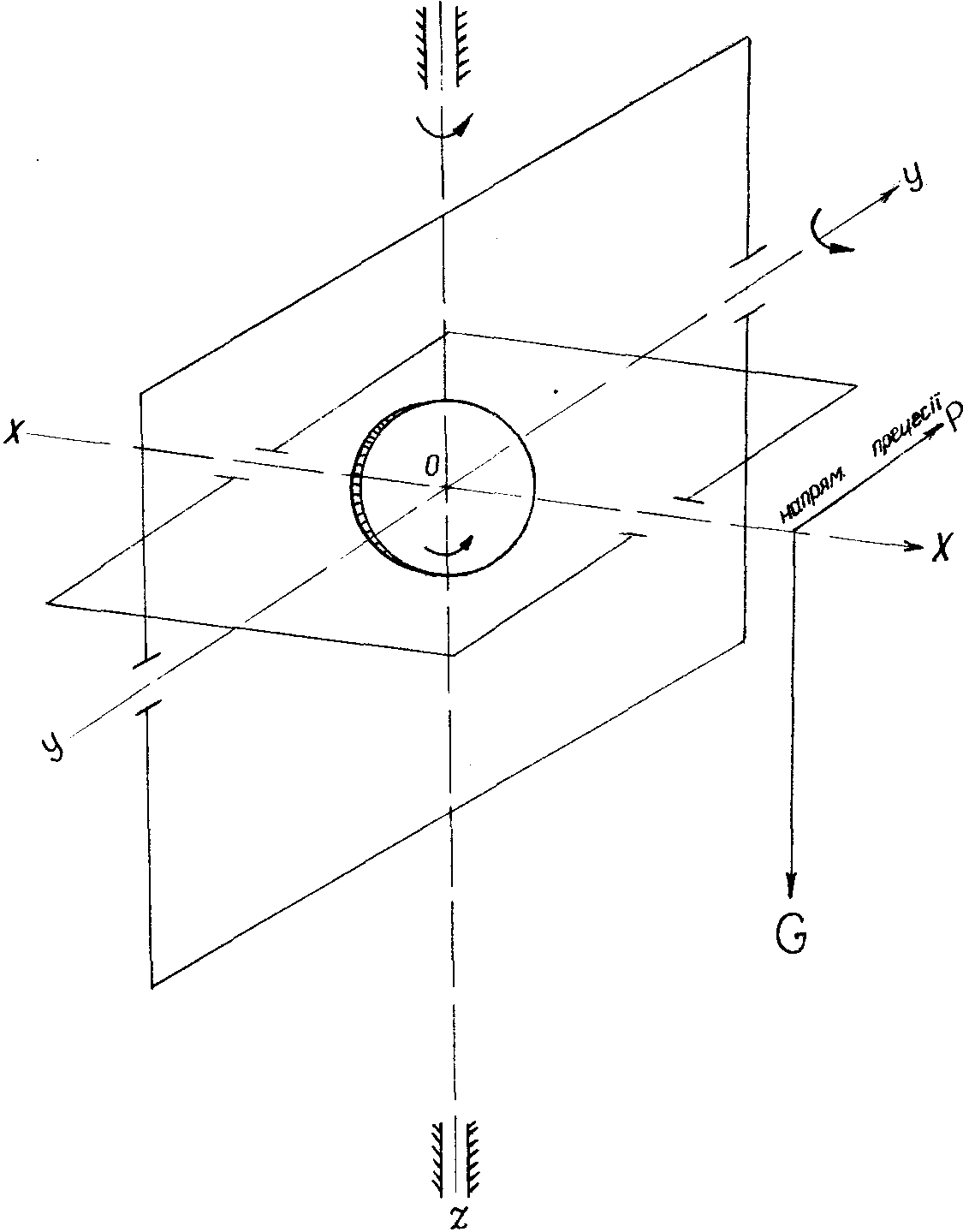
Рис.224
Якщо у гіроскопа в карданному підвісу закріпити зовнішнє кільце наглухо на нерухомій основі, то ми одержимо приклад двоступеневого гіроскопа. Гіроскоп, у якого центр мас збігається з точкою підвісу називається астатичним або урівноваженим. Триступеневий урівноважений гіроскоп прийнято називати свобідним, якщо центр ваги гіроскопа зміщений відносно точки підвісу, то гіроскоп називають навантаженим або важким. Так, наприклад дзиґа є важким гіроскопом, а гіроскоп зображений на рис. 224 – свобідний.
Гіроскопи володіють наступними специфічними властивостями, завдяки яким вони знайшли широке застосування в техніці.
Властивість стабілізації, тобто головна вісь свобідного гіроскопа прагне зберегти своє орієнтування в світовому просторі, тобто в інерціальній системі координат.
Ця
властивість буде виражатися сильніше,
якщо буде збільшуватись кінетичний
момент ротора при постійній кутовій
швидкості його обертання. Якщо осі
![]() обертання надати певний напрям, який
збігається з напрямом на зірку, то вона
буде якби слідкувати за цією зіркою,
поступово повертатися за азимутом і
зенітною віддаллю. Такий рух називається
видимим рухом осі свобідного гіроскопа.
обертання надати певний напрям, який
збігається з напрямом на зірку, то вона
буде якби слідкувати за цією зіркою,
поступово повертатися за азимутом і
зенітною віддаллю. Такий рух називається
видимим рухом осі свобідного гіроскопа.
Властивість прецесії, тобто головна вісь гіроскопа противиться миттєвим ударним навантаженням, тобто під дією короткочасної сили майже не змінює свого напряму.
В цьому легко переконатися, якщо вдарити по дзизі, яка швидко крутиться. Але якщо до осі свобідного гіроскопа прикласти постійну силу (Рис.224), то ця вісь буде повертатися в площині перпендикулярній до прикладеної сили. Такий поворот осі гіроскопа називається прецесією. Прецесія продовжується доти, доки діє зовнішня сила.