

- •ОСНОВНЫЕ ПРИНЦИПЫ И ПОНЯТИЯ 3D МОДЕЛИРОВАНИЯ В T-FLEX CAD 3D
- •Введение в 3D моделирование
- •Основные топологические элементы
- •Основные геометрические понятия в системе T-FLEX CAD 3D
- •Элементы и операции в 3D
- •3D элементы построения
- •Основные трёхмерные операции
- •Операции для работы с листовым металлом
- •Операции для работы с гранями
- •Операции по вставке и копированию 3D элементов
- •Операции создания 3D массивов
- •Команды для анализа геометрии
- •Вспомогательные команды и операции
- •2D проекции
- •Визуализация трёхмерных объектов
- •Анимация трёхмерной модели
- •Организация твердотельного моделирования в T-FLEX CAD 3D
- •Общие рекомендации перед созданием 3D модели
- •Параметризация. Регенерация модели
- •Методы создания трёхмерной модели
- •Как работать в системе T-FLEX CAD 3D
- •Получение справки
- •Создание нового документа. Использование шаблона-прототипа
- •Работа мышкой. Контекстное меню
- •Ввод команд (с клавиатуры, с помощью пиктограмм, из текстового меню)
- •Задание параметров создаваемого элемента
- •Предварительный просмотр
- •Команды T-FLEX CAD 3D по группам
- •Выбор элементов. Настройка
- •Выбор элементов
- •Поиск элементов
- •Открытие новых окон
- •Манипулирование моделью в 3D окне
- •Окно «3D модель»
- •Окно «Диагностика»
- •Оптимальное расположение служебных окон
- •Панели инструментов
- •Настройки
- •КРАТКИЙ ВВОДНЫЙ КУРС ПО СОЗДАНИЮ 3D МОДЕЛИ
- •Основной метод создания 3D модели
- •Создание вспомогательных элементов
- •Создание первой операции вращения
- •Создание отверстий
- •Создание сглаживания
- •Создание чертежа
- •Метод «От чертежа к 3D модели»
- •РАБОТА С ОКНОМ 3D ВИДА
- •Основные положения
- •Методы визуализации 3D сцены
- •3D сцена
- •Активная камера
- •Вращение 3D сцены
- •Автоматическое вращение 3D сцены
- •Центр вращения 3D сцены
- •Метод проецирования
- •Автомасштабирование
- •Плоскость обрезки
- •Параметры 3D вида
- •Вызов команд управления 3D видом с помощью мыши
- •ОБЩИЕ ПАРАМЕТРЫ 3D ЭЛЕМЕНТОВ
- •Общесистемные параметры
- •Закладка «Общие»
- •Закладка «Преобразование»
- •РАБОЧИЕ ПЛОСКОСТИ
- •Начало работы с рабочими плоскостями
- •Рабочие плоскости и 2D чертёж
- •Работа с активной рабочей плоскостью
- •Активизация рабочей плоскости
- •Управление активной рабочей плоскостью
- •Создание рабочих плоскостей
- •Создание рабочей плоскости параллельно геометрической плоскости
- •Создание рабочей плоскости, проходящей через 3D точку
- •Создание рабочей плоскости, проходящей через 3D линию
- •Создание рабочей плоскости, перпендикулярной 3D кривой
- •Создание рабочей плоскости, касательной к поверхности
- •Выбор начала координат рабочей плоскости
- •Создание копии рабочей плоскости
- •Создание рабочей плоскости на основе локальной системы координат
- •Создание стандартной рабочей плоскости (в 3D окне)
- •Создание стандартной рабочей плоскости (в 2D окне)
- •Создание рабочей плоскости на основе 2D проекции
- •Создание рабочей плоскости для вспомогательного 2D вида
- •Изменение размера рабочей плоскости
- •Параметры рабочих плоскостей
- •Закладка «Рабочая плоскость»
- •РАБОЧИЕ ПОВЕРХНОСТИ
- •Основные положения
- •Этапы создания рабочей поверхности
- •Параметрическая область
- •Фиксированный параметр рабочей поверхности
- •Система координат, относительно которой задаётся рабочая поверхность
- •Пример использования рабочей поверхности
- •Правила создания рабочих поверхностей
- •3D УЗЛЫ
- •Способы создания узлов
- •Использование манипулятора при создании 3D узла
- •Основные способы создания узла на 3D элементе или относительно 3D элемента
- •Специальные способы создания узла на основе существующих 3D элементов
- •Создание узла в абсолютных координатах
- •Создание узла по двум проекциям
- •3D ПРОФИЛИ
- •Основные положения. Типы профилей
- •Геометрия профиля
- •Типы профилей
- •Профили на основе 2D элементов
- •Профиль на основе штриховки
- •Профиль на основе текста
- •Профиль на основе линий изображения на рабочей плоскости
- •Автоматическое создание профилей на основе 2D элементов (на активной рабочей плоскости)
- •Профили на основе 3D элементов
- •Профиль на основе цикла или грани
- •Проецирование профиля на грань или тело
- •Копирование 3D профиля
- •3D профиль - эквидистанта
- •Наложение профиля на грань или тело
- •Построение развёртки линейчатой грани
- •Построение развёртки цилиндрической грани
- •Построение развёртки конической грани
- •Построение развёртки набора граней
- •Придание толщины плоскому профилю
- •Создание 3D профилей
- •Создание 3D профиля на основе 2D штриховки или текста
- •Создание 3D профиля на основе линий изображения на рабочей плоскости
- •Автоматическое создание профилей при работе с активной рабочей плоскостью
- •Создание 3D профиля на основе цикла или грани
- •Создание профиля - проекции существующего профиля на грань или тело
- •Копирование 3D профиля
- •Создание 3D профиля - эквидистанты
- •Наложение профиля на грань или тело
- •Придание толщины плоскому профилю
- •Параметры 3D профилей
- •ЛОКАЛЬНЫЕ СИСТЕМЫ КООРДИНАТ
- •Правила создания локальных систем координат
- •Определение начала координат ЛСК
- •Определение направления оси X ЛСК
- •Определение направления оси Y ЛСК
- •Доворот оси X ЛСК до ближайшей точки выбранной поверхности
- •Перемещение ЛСК до касания с поверхностью
- •Изменение ориентации осей локальной системы координат
- •Создание локальных систем координат
- •Параметры локальных систем координат
- •3D ПУТИ
- •Способы создания 3D путей
- •Создание 3D путей на основе 3D элементов
- •Создание 3D пути как сплайна по 3D точкам
- •3D путь по связанным рёбрам
- •3D путь по последовательности 3D путей
- •3D путь как проекция 3D пути на грань или тело операции
- •Создание копии 3D пути
- •3D путь как линия очерка
- •Создание эквидистанты к 3D пути
- •Создание 3D пути на основе сечения тела плоскостью
- •Создание 3D пути с параметрическим изменением 3D точки
- •3D пути на основе 2D элементов
- •Создание 3D пути на основе контура штриховки
- •Создание 3D пути по 2D путям
- •Создать 3D путь по двум проекциям
- •ПУТЬ ТРУБОПРОВОДА
- •Создание 3D пути для трубопровода
- •Плоскость черчения
- •СЕЧЕНИЕ
- •Основные способы создания 3D сечений
- •3D сечение на основе 3D вида
- •3D сечение на основе рабочей плоскости
- •Создание 3D сечения на основе 2D проекции
- •Применение сечения к 3D модели
- •Создание сечения
- •Создание сечения по 3D виду
- •Создание сечений на основе рабочей плоскости
- •Создание сечения на основе 2D проекции
- •Задание параметров 3D сечения
- •2D ПРОЕКЦИИ
- •Создание 2D проекции
- •Построение стандартных видов
- •Создание дополнительного вида
- •Создание разреза или сечения
- •Создание местного разреза
- •Построение проекции на рабочей плоскости
- •Общий случай создания 2D проекции
- •Выбор элементов для проецирования
- •Создание разрыва на проекции
- •Особенности построения и дальнейшее использование 2D проекций
- •Параметры 2D проекции
- •Закладка «Общие»
- •Закладка «Основные параметры»
- •Закладка «Линии»
- •Редактирование 2D проекции
- •ВЫТАЛКИВАНИЕ
- •Основные понятия. Возможности операции
- •Контур выталкивания
- •Направление выталкивания
- •Задание длины выталкивания
- •Типы границ
- •Дополнительные возможности выталкивания
- •Создание операции выталкивания
- •Выбор контура выталкивания
- •Задание направления выталкивания
- •Задание длины выталкивания
- •Задание дополнительных возможностей операции
- •ВРАЩЕНИЕ
- •Основные понятия. Возможности операции
- •Контур вращения
- •Ось вращения
- •Угол вращения контура
- •Дополнительные возможности операции вращения
- •Создание операции вращения
- •Выбор контура вращения
- •Задание оси вращения
- •Задание начального угла и угла поворота
- •БУЛЕВА ОПЕРАЦИЯ
- •Основные понятия. Возможности операции
- •Типы булевой операции
- •Операнды булевой операции
- •Результаты булевых операций
- •Глобальные и локальные булевы операции
- •Выборочные булевы операции
- •Создание булевой операции
- •Основные параметры операции
- •Дополнительные параметры операции
- •СГЛАЖИВАНИЕ РЁБЕР
- •Основные понятия. Возможности операции
- •Виды сглаживания
- •Особенности сглаживания группы рёбер
- •Специальные функции сглаживания рёбер
- •Правила задания операции
- •Правила выбора объектов
- •Задание параметров операции. Использование манипуляторов
- •СГЛАЖИВАНИЕ ГРАНЕЙ
- •Основные понятия. Возможности операции
- •Направляющая
- •Типы сглаживания
- •Режимы сглаживания
- •Формы поверхности сглаживания
- •Специальные возможности
- •Граничные условия
- •Правила задания операции
- •Работа с манипуляторами и декорациями
- •Выбор набора граней
- •Выбор режима сглаживания
- •Выбор типа сглаживания
- •Задание формы поперечного сечения
- •Задание граничных условий
- •Настройка специальных возможностей
- •СГЛАЖИВАНИЕ ТРЁХ ГРАНЕЙ
- •Основные понятия. Возможности операции
- •Общие концепции операции
- •Дополнительные возможности
- •Правила задания операции
- •Выбор набора граней
- •Выбор направляющей
- •Настройка специальных возможностей
- •ПО СЕЧЕНИЯМ
- •Основные понятия. Возможности операции
- •Сечения
- •Точки соответствия
- •Направляющие
- •Граничные условия
- •Совместимость со старыми версиями
- •Правила задания операции «По сечениям»
- •Выбор сечений
- •Задание точек соответствия
- •Выбор направляющих
- •Задание граничных условий
- •Задание дополнительных параметров операции
- •Параметры сглаживания
- •Параметры оптимизации
- •ТЕЛО ПО ТРАЕКТОРИИ
- •Основные возможности операции
- •Контур
- •Контроль над ориентацией контура
- •Траектория и направляющие
- •Коррекция исходного положения контура
- •Кручение контура
- •Масштабирование контура
- •Создание тела по направляющим
- •Методы вычисления вспомогательных векторов с использованием направляющих
- •Правила задания операции
- •Выбор способа ориентации контура
- •Выбор контура
- •Выбор траектории
- •Задание коррекция исходного положения контура
- •Задание закона кручения контура
- •Задание закона масштабирования контура
- •Задание тела по направляющим
- •Дополнительные возможности операции
- •ТЕЛО ПО ПАРАМЕТРАМ
- •Правила создания операции
- •Способ свободной ориентации копии
- •Пример 1
- •Пример 2
- •Способ ориентации копии по путям или поверхностям
- •Пример 3
- •ТРУБОПРОВОД
- •Задание операции трубопровод
- •3D ИЗОБРАЖЕНИЯ
- •Создание 3D изображений
- •Использование 3D изображений для создания планировок
- •Параметры 3D изображений
- •Закладка «Операция»
- •Закладка «Преобразование»
- •ВНЕШНЯЯ МОДЕЛЬ
- •Режимы работы с внешней моделью
- •Вставка внешней модели
- •3D КОПИИ
- •Основные положения и возможности операции
- •Выбор исходного тела (операции)
- •Исходная и целевая системы координат
- •Способы копирования
- •Создание копии
- •Выбор 3D операции
- •Выбор исходной системы координат
- •Выбор целевой системы координат
- •Задание параметров операции
- •Подтверждение создания копии
- •МАССИВЫ
- •Типы массивов. Особенности каждого типа
- •Массив элементов построения
- •Массив Тел и массив операций
- •Массив граней
- •Виды массивов. Особенности массивов каждого вида
- •Линейный массив
- •Круговой массив
- •Массив по точкам
- •Массив по пути
- •Параметрический массив
- •Ограничения и исключения
- •Ограничения
- •Исключения
- •Изменение числа копий в массиве. Привязка к элементам массива
- •Создание 3D массивов
- •Выбор типа массива и исходных объектов массива
- •Задание направляющих элементов и основных параметров массива
- •Задание дополнительных параметров массива
- •Задание ограничений
- •Задание исключений
- •3D СИММЕТРИЯ
- •Создание симметричного тела
- •ОТСЕЧЕНИЕ
- •Задание операции отсечения
- •Создание отсечения
- •Создание рассечения
- •Примеры создания операции
- •Рассечение тела на две части
- •РАЗДЕЛЕНИЕ
- •Создание разделения
- •Параметры разделения
- •УКЛОН ГРАНЕЙ
- •Основные понятия и возможности операции
- •Направление уклона
- •Неподвижное ребро
- •Отсчёт угла уклона
- •Неподвижная грань
- •Использование рабочей плоскости
- •Уклон всех смежных граней
- •Совместная обработка граней
- •Методы уклона граней
- •Уклон граней по смещению
- •Использование нескольких неподвижных граней/ребер
- •Обработка стыка между уклоняемой и смежной с ней гранями
- •Обработка стыка между двумя уклоняемыми гранями
- •Ступенчатый уклон
- •Разбиение грани
- •Создание уклона граней
- •Основные параметры операции
- •Дополнительные параметры операции
- •УКЛОН ТЕЛА
- •Основные понятия и возможности операции
- •Направление уклона
- •Исходные ребра
- •Разделяющее тело
- •Исходные грани
- •Угловое соединение
- •Исправление вогнутых углов
- •Обработка стыков уклоненных граней
- •Подрез уклона
- •Замена ребер
- •Создание уклона тела
- •Основные исходные данные операции
- •Дополнительные параметры операции
- •ОБОЛОЧКА
- •Основные положения
- •Создание оболочки
- •Выбор удаляемой грани или тела
- •Выбор граней, для которых толщина стенки задается отдельно
- •Дополнительные параметры операции
- •ПРУЖИНЫ
- •Основные сведения и возможности операции
- •Создание операции пружина
- •Задание оси пружины
- •Задание параметров операции пружина
- •Выбор стартовой точки положения профиля пружины
- •Задание поджима и зашлифовки концов пружины
- •Задание выравнивания пружины по начальной и конечной точкам
- •СПИРАЛИ
- •Основные сведения и возможности операции
- •Ось спирали
- •Профиль спирали и его ориентация в пространстве
- •Основные параметры спирали
- •Начальное положение профиля спирали
- •Сглаживание
- •Задание операции спираль
- •Задание оси спирали
- •Выбор профиля спирали
- •Задание ориентации 3D профиля в пространстве
- •Задание параметров спирали
- •Выбор стартовой точки положения профиля спирали
- •РЕЗЬБА
- •Основные понятия. Возможности операции
- •Создание резьбы
- •Задание основных параметров резьбы
- •Задание отступов
- •Отображение резьбы на 2D проекциях
- •Резьбовые соединения
- •ОТВЕРСТИЯ
- •Основные понятия и возможности операции
- •Шаблоны отверстий
- •Точки привязки отверстий
- •Соосные отверстия
- •Ориентация отверстий
- •Глубина отверстия
- •Отверстия через несколько тел
- •Создание отверстий
- •Выбор типа и основных геометрических параметров отверстий
- •Задание точек привязки отверстий
- •Задание глубины отверстия
- •Создание отверстий через несколько тел одновременно
- •Выбор отверстия для изменения положения и ориентации отверстия
- •Изменение точки привязки отверстия
- •Изменение ориентации отверстия. Создание соосного отверстия
- •РАБОТА С ЛИСТОВЫМ МЕТАЛЛОМ
- •Подготовительные операции при работе с листовым металлом
- •Общие параметры листового металла
- •Заготовка для листовых операций
- •Гибка. Основные понятия и возможности
- •Виды гибки
- •Общие параметры гибки
- •Основные понятия гибки
- •Сгибание
- •Отгибание
- •Приклеивание
- •Уменьшение язычка
- •Ослабления напряжений в металле
- •Дополнительные операции при работе с листовым металлом
- •Разгибание детали
- •Повторная гибка развёрнутой заготовки
- •Библиотека часто встречающихся элементов штамповки
- •Правила задания операций листовой штамповки
- •Задание параметров листовых операций
- •Создание заготовки
- •Создание различных видов гибки
- •Разгибание
- •Повторная гибка
- •Создание типовых операций листовой штамповки
- •ОПЕРАЦИИ ДЛЯ РАБОТЫ С ГРАНЯМИ
- •Сшивка
- •Работа с командой
- •Выбор сшиваемых поверхностей
- •Задание дополнительных параметров
- •Разделение граней
- •Работа с командой
- •Выбор метода разделения
- •Выбор разделяемых объектов
- •Выбор разделяющих объектов
- •Задание направления
- •Удаление граней
- •Основные положения
- •Работа с командой
- •Выбор удаляемых граней
- •Выбор способа удаления
- •Дополнительные параметры
- •Отделение граней
- •Основные положения
- •Работа с командой
- •Выбор отделяемых граней
- •Указание методов обработки исходных и отделяемых граней
- •Замена граней
- •Основные положения
- •Работа с командой
- •Выбор заменяемых и заменяющих граней
- •Задание дополнительных параметров
- •Изменение граней
- •Основные положения
- •Работа с командой
- •Выбор изменяемых граней
- •Указание параметров граней
- •Задание дополнительных параметров
- •Перемещение граней
- •Работа с командой
- •Задание перемещаемых граней
- •Задание параметров преобразования
- •Расширение поверхности
- •Работа с командой
- •Выбор расширяемого объекта
- •Выбор рёбер
- •Задание величины продления грани
- •Задание дополнительных параметров
- •Заполнение области
- •Работа с командой
- •Выбор области заполнения
- •Выбор листового тела
- •Задание дополнительных параметров
- •3D СБОРКИ
- •Общие сведения
- •Что такое трехмерная сборочная модель?
- •Методы проектирования сборок
- •Создание сборки из 3D фрагментов
- •Принцип работы механизма 3D фрагментов
- •Правила работы с 3D фрагментами
- •Подготовка документа T-FLEX CAD к использованию в качестве 3D фрагмента.
- •Проектирование сборок «Сверху вниз»
- •Принцип работы
- •Правила создания Детали
- •Сопряжения и степени свободы
- •Что такое сопряжение?
- •Типы сопряжений
- •Создание сопряжений
- •Приёмы работы с готовыми сопряжениями
- •Конфигурации
- •Что такое Конфигурация?
- •Работа с Конфигурациями
- •Деталировка
- •Разборка
- •Выполнение команды
- •Как правильно задать преобразования для разборки
- •АДАПТИВНЫЕ 3D ФРАГМЕНТЫ
- •Подготовка адаптивного 3D фрагмента
- •Вставка адаптивного 3D фрагмента, задание значений адаптивных элементов
- •Задание адаптивных элементов у существующего фрагмента
- •РЕДАКТИРОВАНИЕ 3D ЭЛЕМЕНТОВ
- •ПРЕОБРАЗОВАНИЕ
- •Типы преобразований
- •Перемещение/поворот
- •Поворот вокруг оси
- •Перемещение вдоль вектора
- •Масштабирование
- •Симметрия
- •Преобразование 3D фрагмента
- •Преобразование сопряжения
- •Работа с командой
- •Использование манипуляторов
- •Дополнительные опции и параметры
- •МАТЕРИАЛЫ
- •Создание и редактирование материалов
- •Группа «Цвета»
- •Группа «Текстура»
- •Группа «Отображение текстуры»
- •Группа «Преобразование текстуры»
- •Группа «Штриховка в сечении»
- •Материал POV-Ray
- •Дополнительные параметры
- •Нанесение материала на отдельную грань (грани)
- •ИСТОЧНИКИ СВЕТА
- •Создание источника света
- •Точечный источник света
- •Направленный источник света
- •Прожектор
- •Параметры источника света
- •КАМЕРЫ
- •Создание камер
- •Задание камеры
- •Активация камеры
- •Перемещение камеры
- •Параметры камеры
- •ФОТОРЕАЛИСТИЧНОЕ ИЗОБРАЖЕНИЕ
- •Основные положения
- •Работа с командой
- •Прототипы для фотореализма
- •Выбор и настройка качества изображения
- •Примеры фотореалистичных изображений моделей T-FLEX CAD
- •АНАЛИЗ ГЕОМЕТРИИ
- •Характеристики
- •Работа с командой
- •Проверка модели
- •Работа с командой
- •Проверка пересечений тел
- •Работа с командой
- •Измерение кривизны кривых
- •Измерение кривизны поверхностей
- •Работа с командой
- •Типы измеряемых величин
- •Измерение кривизны в точке
- •Отклонение граней
- •Работа с командой
- •Зазор между гранями
- •Работа с командой
- •Расхождение нормалей
- •Работа с командой
- •Гладкость модели
- •Работа с командой
- •Разнимаемость формы
- •Работа с командой
Трёхмерное моделирование
Если при создании 3D фрагмента целевая ЛСК не была указана, т.е. фрагмент был привязан «по умолчанию», то механизм степеней свободы будет к нему неприменим.
При проектировании целостных сборок-механизмов с использованием степеней свободы и сопряжений важно учитывать следующий момент. 3D фрагмент, который добавляется в сборку с привязкой по ЛСК, может быть либо связан с каким-нибудь компонентом сборки, либо – нет. В последнем случае поведение компонента при перемещении компонентов сборки может не соответствовать ожидаемому. Например, он останется на месте, когда окружающие его детали переместятся, или, наоборот, его перемещение не приведет к перемещению соседних деталей.
Для того чтобы 3D фрагмент оказался связанным с другим компонентом, необходимо, чтобы его целевая ЛСК привязки была построена на геометрических объектах этого компонента. Иначе он будет привязан к неподвижной среде.
Для создания сложных сборок в системе реализован механизм «Агрегатов». Данный механизм позволяет создавать сопряжения сначала в модели 3D фрагмента, которые впоследствии автоматически будут учитываться при работе такого 3D фрагмента в сборке.
Создание сопряжений
Для создания сопряжения используйте команду:
Клавиатура |
Текстовое меню |
Пиктограмма |
||
|
|
|
|
|
<3CT> |
«Сервис|Сопряжения|Создать |
|
|
|
|
|
|
||
сопряжение» |
|
|
|
|
|
|
|
|
|
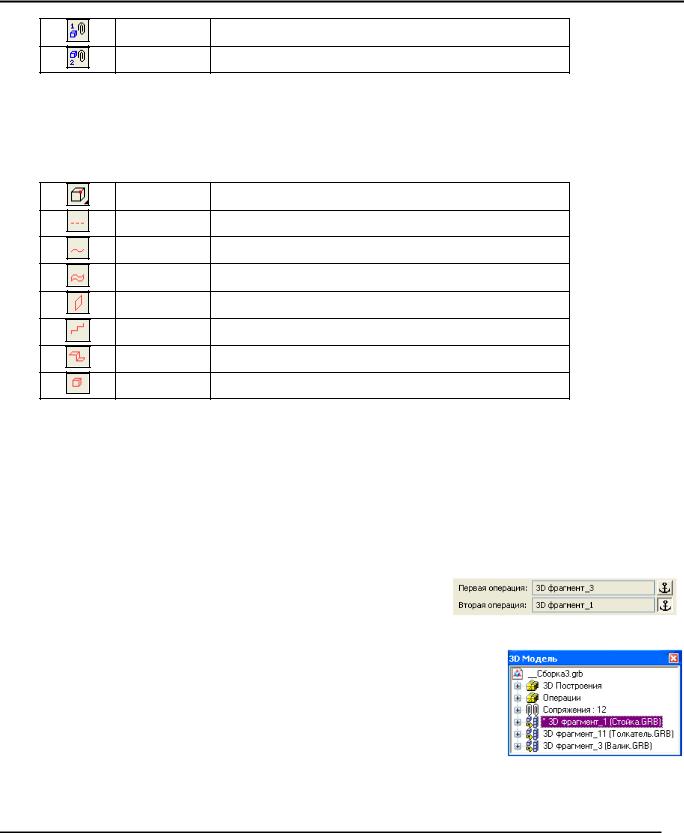
Для создания нового сопряжения нужно выполнить следующие действия: 1. Выбрать тип сопряжения.
2.Выбрать первый объект.
3.Выбрать второй объект.
4.Задать параметры выбранного типа сопряжения (при необходимости).
5.Подтвердить выбор.
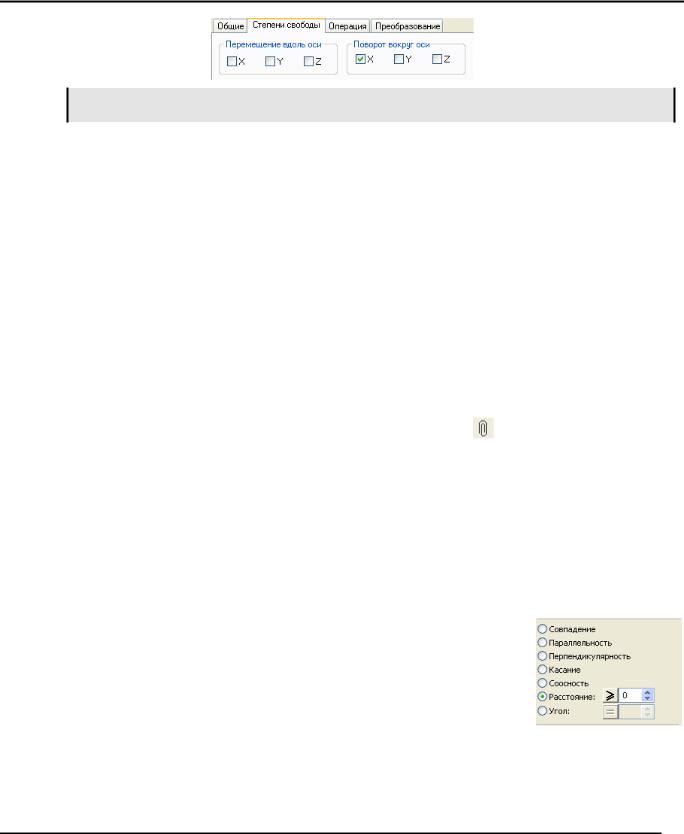
Выбор типа сопряжения
Выбор типа сопряжения осуществляется в окне свойств. Для выбора нужно установить переключатель в соответствующую позицию.
Для сопряжений «Расстояние» и «Угол» можно сформировать условие по отношению к заданному значению. Если нажимать на кнопку перед числом, то на ней будет меняться знак условия.
Выбор элементов для сопряжения
Режимы выбора первого или второго геометрических объектов переключаются следующими опциями:
568
3D Сборки
<F> Выбор первого элемента
<S> Выбор второго элемента
После выбора первого элемента система автоматически включает опцию для выбора второго элемента. При необходимости вернуться к заданию первого элемента, включите соответствующий режим вручную.
В зависимости от типа создаваемого сопряжения допускается выбирать различные геометрические объекты. Настройка на выбор нужного типа геометрических данных осуществляется при помощи опций автоменю:
<V> Выбор точки
<A> |
Выбор оси |
<C> Выбор кривой
<U> Выбор поверхности
<L> Выбор плоскости
<W> Выбор проволочного тела
<H> Выбор листового тела
<B> Выбор твёрдого тела
Для некоторых сопряжений часть опций может быть постоянно или временно недоступна (см. выше таблицы сочетаний). Каждая опция включает набор фильтров для выбора объектов, способных определить нужный геометрический элемент.
Выбранные объекты подсвечиваются. Также подсвечиваются и операции, на которых выбраны геометрические элементы. Одновременно система предлагает предварительный вариант решения сопряжения. Для этого она перемещает элементы для выполнения условий сопряжения. Если один или оба элемента уже имеют сопряжения с другими телами или неподвижное соединение с внешней средой, то новое решение рассчитывается с соблюдением всех ранее установленных ограничений.
Фиксация элемента сопряжения
При создании сопряжения можно зафиксировать в пространстве один из двух компонентов сопряжения. Фиксация производится нажатием на кнопку с изображением якоря в окне свойств.
После фиксации объект оказывается «замороженным» в 3D пространстве в текущем положении. На него не будут действовать новые преобразования и не повлияет изменение параметров существующих перемещений. В дереве модели перед именем зафиксированной операции отображается знак
«*».
569

Трёхмерное моделирование
Если выбрать в дереве модели 
 зафиксированную операцию, то в контекстном меню будет команда
зафиксированную операцию, то в контекстном меню будет команда
«Зафиксировать положение» с нажатой пиктограммой  . Выбор этой команды позволит снять ограничение.
. Выбор этой команды позволит снять ограничение.
Дополнительные параметры сопряжений
Обратное направление. Данная опция разворачивает второй (или доступный подвижный) сопрягаемый компонент на 180 градусов или перемещает его в другую область решений.
Развернуть. Опция работает только при задании сопряжения типа «расстояние» между двумя плоскостями. В дополнение к предыдущей опции она позволяет изменить направление отсчета расстояния.
Предельное время расчёта – параметр, регулирующий количество шагов, которое разрешено затратить системе для поиска решения с заданной точностью. Этот ограничитель нужен для того, чтобы при случайной ошибке пользователя не допустить слишком долгих вычислений системы, которые возможны при поиске решений в сложных случаях. Параметр устанавливается при помощи регулятора.
Если при текущем количестве итераций решение не было найдено, то можно попробовать увеличить допуск. Хотя, вместо этого иногда бывает достаточно предварительно вручную придвинуть сопрягаемые компоненты к вероятной области решений в команде «Перемещение сопряженных элементов» (см. ниже).
Анимировать – данный параметр позволяет системе плавно перемещать элементы сопряжений для просмотра результатов решения сопряжения.
Приёмы работы с готовыми сопряжениями
Работа с деревом модели
Созданные сопряжения отображаются в окне «3D модель». Вся работа с созданными сопряжениями в основном осуществляется через это служебное окно. В дереве модели создаётся отдельная папка, в которую система автоматически помещает все сопряжения. Для каждого типа сопряжения рисуется пиктограмма, соответствующая типу сопряжения.
Возле каждого сопряжения имеется знак  . Если
. Если
нажать на него 

 , то в раскрытой ветке дерева модели будут отображены объекты, на основе которых создано сопряжение.
, то в раскрытой ветке дерева модели будут отображены объекты, на основе которых создано сопряжение.
Сопряжения можно дополнительно группировать в
подпапки. Допускается создавать только один уровень подпапок. Все папки сопряжений
обозначаются пиктограммой  . Каждая дополнительная папка имеет уникальное название.
. Каждая дополнительная папка имеет уникальное название.
570
3D Сборки
Группирование по дополнительным папкам ни на что не влияет. Оно используется только для удобства работы при сортировке большого количества сопряжений.
Для переноса сопряжения в другую папку воспользуйтесь пунктом контекстного меню «Переместить сопряжение в папку». В новом подменю доступны команды для создания новой дополнительной папки сопряжений, перемещения в основную и уже существующие дополнительные папки.
Остальные команды этого контекстного меню являются общими для многих элементов системы («Свойства», «Изменить», «Удалить», «Информация…»).
Подавление сопряжений
Любое сопряжение можно подавить. Команда для подавления сопряжения и отмены подавления
находится в контекстном меню при выборе сопряжения 
 . Также можно вызвать подавление сразу группы сопряжений, если вызвать команду из контекстного меню кликом по папке сопряжений. Подавленное сопряжение помечается в дереве модели голубым крестом и исключается из расчёта сопряжений.
. Также можно вызвать подавление сразу группы сопряжений, если вызвать команду из контекстного меню кликом по папке сопряжений. Подавленное сопряжение помечается в дереве модели голубым крестом и исключается из расчёта сопряжений.
Движение механизма
Для динамического просмотра движений собранного механизма используйте команду:
Клавиатура |
Текстовое меню |
Пиктограмма |
||
|
|
|
|
|
<3CM> |
«Сервис|Сопряжения|Перемещение |
|
|
|
|
|
|
||
элементов» |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
После вызова команды требуется выбрать нужную деталь механизма для задания движения. Движение задаётся перетаскиванием выбранной детали при помощи курсора. При этом пользователь имитирует воздействие на механизм, как если бы к выбранной точке детали была приложена сила, направленная в сторону курсора в плоскости экрана. Под воздействием силы деталь механизма начинает двигаться. Движение ограничено заданными сопряжениями с другими деталями и внешним пространством. Выбранная деталь тянет за собой другую и т.д., пока в движение не будет вовлечён весь механизм. При этом во время движения учитывается масса и моменты инерции перемещаемых компонентов.
571
Трёхмерное моделирование
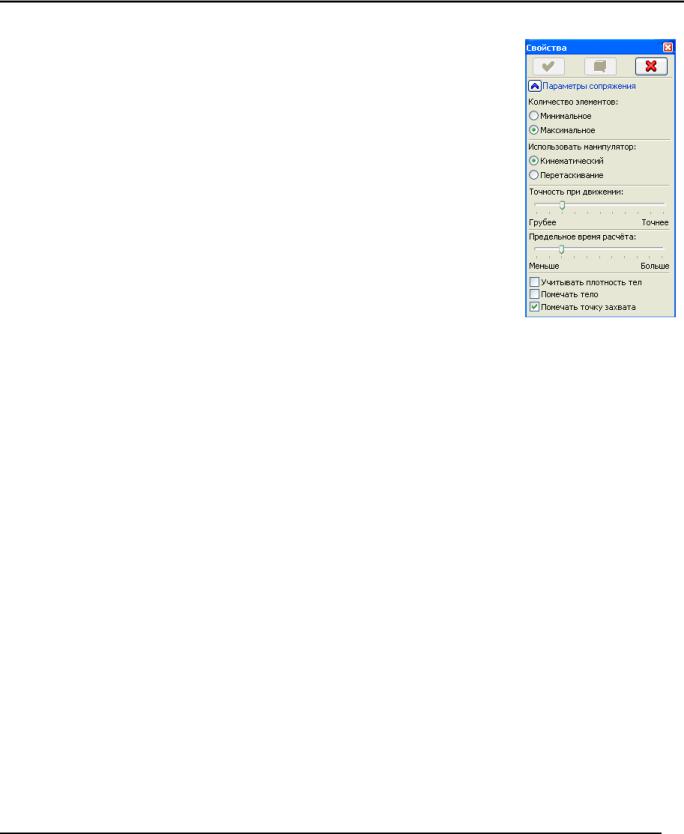
Настройка режимов движения осуществляется в окне свойств.
Количество элементов: Максимальное/Минимальное. При перемещении сопряженных элементов можно воздействовать на все детали собранного механизма или только на минимально возможную цепочку сопряжений.
Использовать манипулятор: Кинематический/Перетаскивание. Для большинства случаев перемещения деталей механизма нужно использовать режим кинематического манипулятора. При этом формируется плавное движение. Оно имитирует следствие приложения силы в точку, за которую пользователь тянет деталь. Движение строится с учётом всех заданных ограничений. При достижении границы области решений механизм останавливается. Перетаскивание предназначено для случаев, когда деталь механизма нужно переместить в другую область решений, не соприкасающуюся с текущей. В этом режиме перемещение всех механизмов может происходить скачкообразно.
Точность при движении. Задаёт заниженный уровень точности вычислений для более быстрого расчета и соблюдения условий сопряжения в момент движения механизма.
Предельное время расчёта. Задаёт количество шагов-вычислений, которое разрешается применить системе для достижения точности вычислений при движении.
Учитывать плотность тел. Для более точной имитации движения механизма есть возможность учитывать реальную плотность при расчете массы его деталей. Иначе плотность устанавливается одинаковой для всех компонентов.
Помечать тело. Вспомогательный параметр, позволяющий включать/отключать пометку детали механизма, за которую тянет пользователь для создания движения.
Помечать точку захвата. Данный параметр включает пометку точки, за которую тянет курсор. Точка помечается крестиком. Эту функцию можно использовать при отключении пометки тела.
Оптимальная длина цепочек сопряжений
При создании механизма одна деталь «цепляется» к внешней среде, другие детали посредством сопряжений стыкуются друг к другу. Таким образом, ряд деталей, последовательно состыкованных друг с другом, можно представить как цепочку сопряжений. Если к одной детали присоединено одновременно несколько других деталей, то цепочка сопряжений разветвляется. При создании механизмов необходимо стремиться к максимально коротким цепочкам. Более короткие цепочки решаются быстрее и при этом возникает меньшая погрешность вычислений.
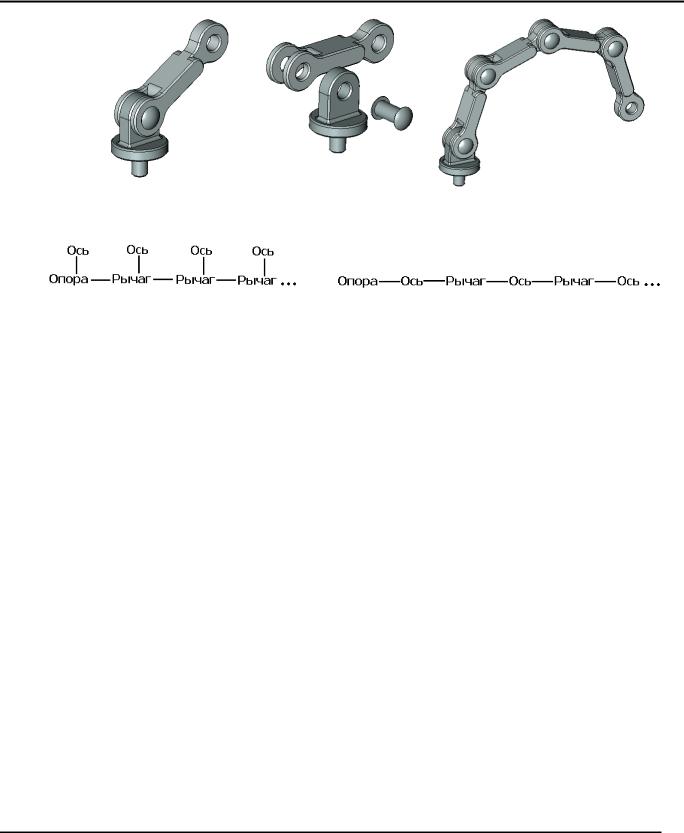
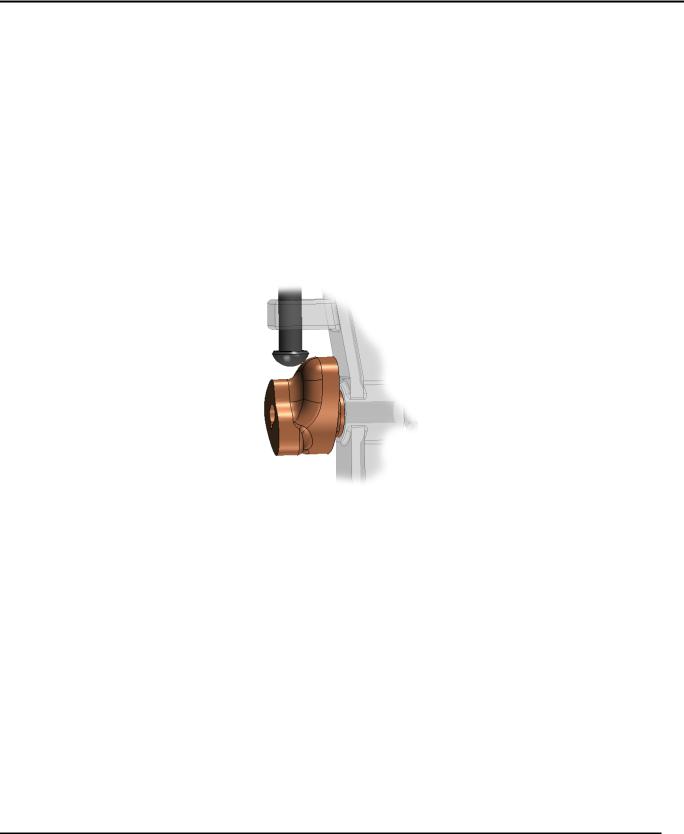
Рассмотрим следующий характерный пример – необходимо создать модель простого механизма, показанную на рисунке. Механизм представляет собой соединение шарнирного типа, объединяющее вместе три детали – опору, рычаг и ось. Наиболее рациональным способом в данном случае будет создание двух маленьких цепочек сопряжений, а не одной длинной.
Рычаг нужно при помощи сопряжений соосности и совпадения плоских граней сразу привязать к опоре. Ось также при помощи соосности и совпадения привязывается к любой детали, например, к опоре. Получается две цепочки сопряжений: опора-рычаг и опора-ось. В данном случае нерационально было бы, например, к опоре привязать ось, а к оси привязывать рычаг, так как получилась бы более длинная цепочка сопряжений «опора-ось-рычаг».
572
3D Сборки
Пример механизма |
Детали механизма |
Усложнение механизма |
|
|
(добавление новых сопряжений) |
Рациональная цепочка |
Нерациональная цепочка |
Конечно, на таком простом примере сколько-нибудь заметного ухудшения производительности системы не произойдет, но в более сложных случаях разница становится заметна.
Рекомендации по совместному использованию привязки по ЛСК и сопряжений
В данном разделе рассмотрены рекомендуемые правила совместного использования сопряжений и привязки ЛСК при создании сборок. Привязка деталей по сопряжениям в большинстве случаев должна использоваться совместно с привязкой по ЛСК. Причём, приоритетным следует считать традиционный способ – привязку фрагментов при помощи систем координат. У этого способа есть ряд преимуществ перед сопряжениями.
Во-первых, некоторые типы геометрических связей, в том числе наиболее часто используемые (одноосевой шарнир), могут быть решены одной ЛСК, а для связи при помощи сопряжений может потребоваться создание связки, например, из двух или более сопряжений. В частности, одноосевой шарнир создаётся двумя сопряжениями (соосность + совпадение торцевых граней) или только одной ЛСК (разрешен поворот вокруг одной оси). Из этого главного преимущества вытекают следующие:
•В целом, система работает быстрее (сокращается длина цепочек сопряжений, меньше погрешность вычислений, проще расчёт).
•Формируется более простая структура модели, за счет того, что не создается лишних элементов (сопряжений).
•Обеспечивается бóльшая устойчивость к топологическим изменениям модели (за счет минимального использования топологических элементов тел).
Когда же оправдано использование сопряжений? Для ответа на этот вопрос рассмотрим процесс проектирования сборки. С точки зрения интересующего нас вопроса, как правило, перед конструктором могут стоять 2 задачи.
Задача 1: создание сборочной модели без возможности «движения» механизма. Пользователь заранее знает, что он проектирует, что его модель после завершения сборки не должна будет двигаться, это ему не нужно. К примеру, если мы проектируем телевизор или дом, то вряд ли понадобится «оживлять» их в динамическом режиме.
573
Трёхмерное моделирование
Когда перед пользователем стоит подобная задача, то при наполнении сборки деталями решается один основной вопрос – как правильно расположить деталь на сборке. Наиболее эффективное решение даёт «традиционный» способ – вставка 3D фрагментов с использованием ЛСК. В дополнение к общим преимуществам этого метода, от пользователя потребуется меньшее количество действий. Механизм вставки 3D фрагмента требует меньше времени за счет того, что нужно определить меньшее количество элементов:
1. Исходную ЛСК (выбор может выполняться автоматически).
2.Место привязки (выбор целевой ЛСК или геометрии для её создания осуществляется в 3D окне).
Вто же время каждое новое сопряжение потребовало бы определения геометрических данных для двух компонентов, а для точного расположения компонента, как правило, нужно создать несколько сопряжений.
Прибегать к использованию сопряжений следует:
•в сложных случаях геометрического взаимодействия;
•когда требуется расположить на сборке деталь, которая имеет контакт с другими деталями в нескольких местах.
Задача 2: построение сборки с возможностью «оживления» спроектированного механизма в команде перемещения сопряженных элементов. В таком случае все части собранного механизма должны правильно взаимодействовать друг с другом. Для всех подвижных частей должны быть обязательно описаны необходимые условия для расчёта системы сопряжений при движении механизма.
Вданной ситуации рекомендуется придерживаться правил, приведенных ниже.
•Для деталей, которые не должны изменять своего положения относительно элементов, к которым привязаны, рекомендуется использовать ЛСК без степеней свободы. К примеру, гайка, надетая на болт, всегда должна следовать за болтом и не должна иметь перемещений относительно болта.
•Для деталей, изменяющих взаимное положение, в первую очередь нужно использовать ЛСК со степенями свободы. Это даст выигрыш по всем основным преимуществам (см. выше).
Сопряжения используются при привязке деталей в следующих случаях:
574