

5. Связь различных форм мощности (механической, электрической, волновой, тепловой)
Используя разработанную простую модель канала передачи мощности, рассмотрим линию электропередачи. Будем отождествлять силу натяжения с напряжением в линии, а величину переносной скорости шкива с током. Величина передаваемой мощности будет равна произведению этих величин:
N = ei, где e — напряжение, а i — ток. (13)
Существует ли здесь подобный предел для величины передаваемой мощности, аналогичный найденному нами для ремённой передачи, и если существует, то как он связан с материалом этого канала?
Ключевой вопрос относится к аналогу «скорости распространения волны упругой деформации».
Обычно в этих случаях составляется телеграфное уравнение, которое весьма тщательно разобрал академик А.И.Мандельштам в своих лекциях по теории колебаний. Там же показаны весьма тонкие детали процесса составления и решения этого уравнения.
Поскольку оно является аналогичным соответствующему уравнению для ремённой передачи, то его решением является «стоячая волна» электромагнитных колебаний в электрической линии, соответствующая «току нагрузки» ≡ «переносной скорости», которая равна нулю. Эта «стоячая волна» электромагнитных колебаний тождественна «стоячей волне» упругой деформации неподвижного ремня.
«Мощность», которая циркулирует в линии, электротехники называют «реактивной мощностью».
Очевидно, что «реактивная мощность» может достигать двух предельных значений, соответствующих «натяжению» и «сжатию» ремня. Активную мощность мы будем связывать с током нагрузки, эквивалентным переносной скорости.
Эта
активная мощность должна демонстрировать
прохождение через максимум и последующий
спад до нуля (соответствующий росту
переносной скорости выше значения
![]() до W). Этот факт хорошо известен в
электротехнике, но поскольку в ней
отсутствует понятие, эквивалентное
«скорости распространения волны упругой
деформации», то это явление описывается
в терминах «фазового сдвига» между
током и напряжением.
до W). Этот факт хорошо известен в
электротехнике, но поскольку в ней
отсутствует понятие, эквивалентное
«скорости распространения волны упругой
деформации», то это явление описывается
в терминах «фазового сдвига» между
током и напряжением.
Скалярное
произведение тока на напряжение
обращается в нуль, когда ток и напряжение
отличаются по «фазе» на 90° или
![]() .
.
Таких точек на круговой диаграмме — две. Они соответствуют переносной скорости ремня, равной нулю, либо равной W. Две точки на круговой диаграмме соответствуют максимуму величины активной мощности и отличаются знаком.
На модели ременной передачи этим точкам соответствуют два значения максимальной мощности, отличающихся направлением передачи мощности от первого вала ко второму и от второго вала (который становится «источником») к первому (который становится «нагрузкой»).
Это дает возможность выразить мощность как в механической форме, так и в электрической.
N = Tmax · Vx или N = emax · ix
или, для второго случая,
N = Vmax · Tx или N = Imax · Ex.
Пополним нашу модель обобщённого канала ещё одной характеристикой — расстоянием между осями валов — l. Пользуясь этой характеристикой и найденным выше значением скоростей — скорости волны упругой деформации, обозначенной через W и линейной скорости ремня V, мы можем перейти к частотному описанию нашего канала. Имеем
![]()
![]()
Выражение νmax означает число «проходов» волны упругой деформации за единицу времени от первого вала ко второму и обратно, если натяжение ремня максимально.
Выражение ν′переносная означает число «проходов» от второго вала к первому и обратно за единицу времени, если бы с такой скоростью распространялась соответствующая волна.
В таком рассмотрении мы имеем «частотные» характеристики нашего механизма. Введение переносной скорости «добавляет» и «уменьшает» частоту волны упругой деформации, изменяя скорость «прямой» и «отраженной» волн.
Частота
волны, идущей «вправо», определяемая
разностью скоростей W — V , будет
равна
![]() .
.
Полученный результат в виде различия «собственных частот» прямой и отраженной волн известен в радиотехнике под названием «модуляции». В нашей системе обнаруживаются три типа частот: νmax — немодулированная основная частота и два «спутника» (νmax — ν′переносная) и (νmax + ν′переносная).
Мы подошли к ключевой проблематике рассмотрения динамики машин.
Мы обнаруживаем, что пока нет переносной скорости шкива, т.е. когда система консервативна, решением уравнений является «стоячая волна» упругой деформации. Это решение дифференциального уравнения в частных производных второго порядка.
Когда начинается процесс передачи мощности, мы переходим к динамике консервативных систем, которые описываются дифференциальными уравнениями в частных производных третьего порядка.
Их решение существует всегда, если обеспечена полнота исходных данных. Нам хотелось показать читателю важность восприятия полной физической картины наблюдаемого явления.
Рассмотренный нами «частный» подход к ременной передаче должен облегчить читателю переход от «точечного» описания динамической системы к «волновому» описанию той же самой динамической системы, но в другой «системе координат».
Вернёмся к нашему «частному» подходу. Решение волнового уравнения «при закреплённом конце» обеспечивает наличие «отражённой» волны, но сама запись уравнения не содержит никаких указаний на длину ремня. Нужно догадаться использовать для решения задачи «расстояние» между осями валов.
Само значение линейной скорости ремня V представляется независимой переменной.
Нужно догадаться, что линейная скорость ремня, определяющая величину передаваемой мощности, «связана» со скоростью волны упругой деформации.
Теперь мы получаем понимание решений дифференциальных уравнений в частных производных третьего порядка и понимание роли физических свойств материала канала машины.
Материал канала машины даёт нам константу или инвариант, определяющий верхнюю грань передаваемой мощности.
Такую верхнюю грань нельзя обнаружить, не решая волнового уравнения. Решив волновое уравнение, мы получаем необходимую константу.
Вводя в рассмотрение расстояние между источником и нагрузкой, мы получаем «частное» описание. Теперь переносная скорость ремня может быть представлена в форме «частотной модуляции» и необходимое решение всегда существует.
Если наша физическая картина полна, то модель передачи мощности через электрическую линию может быть построена на базе «модуляции» по частоте «прямой» и «отражённой» волн.
Именно так и строил общую теорию электрических машин и механизмов Г. Крон.
Поскольку точное решение дифференциальных уравнений в частных производных третьего порядка в общем виде отсутствует, то решение инженерных задач передачи мощности через линию принято выражать в терминах «сдвига фаз» между током и напряжением.
Эти «фазовые соотношения» можно представить круговой диаграммой (рис. 22.7)
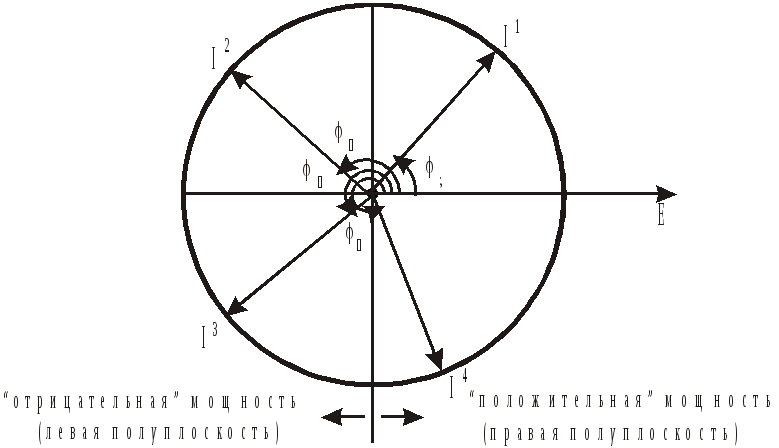
Рис. 22.7. «Фазовые соотношения» на «приемном конце линии»
Величина «активной мощности» на приёмном конце электрической линии определяется «скалярным произведением» векторов напряжения Ē и тока Ī
N = Ē · Ī = EI cos φ (14)
По диаграмме мы видим, что в правой полуплоскости это скалярное произведение положительно, а в левой полуплоскости — отрицательно. Эти знаки означают «положительную» и «отрицательную» нагрузку.
Для большей наглядности физической картины, даваемой ременной передачей, произведём «отождествление» понятий.
Будем считать «натяжение» ремня аналогом тока.
Изменение знака скалярного произведения означает, что второй вал перестал быть «нагрузкой», а стал «источником» мощности (что соответствует «натяжению» нижней части ремня).
Наше выражение:
N = Ē · Ī (15)
переходит в выражение
N = T · V (16)
Однако, во втором выражении и натяжение и скорость либо параллельны, либо антипараллельны.
Роль
«фазы» во втором выражении будет играть
абсолютная величина переносной скорости,
которая может изменяться от + W до —
W, проходя через значение ±
![]() .
.
При
+ W и — W величина передаваемой
мощности равна нулю, что соответствует
концам вертикального диаметра фазовой
диаграммы т.е. углам φ = 90˚ =
![]() или φ = 270˚ =
или φ = 270˚ =
![]() .
.
При
±![]() величина передаваемой мощности
максимальна, что соответствует концам
горизонтального диаметра, т.е. углам φ
=0˚ и φ =180˚ = π.
величина передаваемой мощности
максимальна, что соответствует концам
горизонтального диаметра, т.е. углам φ
=0˚ и φ =180˚ = π.
Эти четыре точки мы отождествляем с соответствующим произведением натяжения на переносную скорость.
Исходя из естественного желания инженера — «упростить» выполнение проектного решения — часто заменяют электрическую линию с распределённым параметрами «эквивалентной схемой» четырёхполюсника.
Теперь мы знаем, что эта, так называемая «эквивалентная схема», является приемлемой заменой однородной линии, когда особенностями процесса в виде суперпозиции «стоячей волны» и наложенной на неё «переносной скорости» можно пренебречь.
Заменяя переносную скорость — величиной тока, а натяжение — величиной напряжения, получим схему «обобщённого трансформатора» (рис. 22.8).

Рис. 22.8. Однородная линия (без потерь) как «обобщенный трансформатор»
При отсутствии диссипации уравнение мощности на входе и выходе имеет одно и то же значение:
N = E1I1 = E2I2 (17)
В этой записи мы приходим к «элементарной» или «примитивной» модели обобщённого канала.
С учетом диссипации, можно записать уравнение баланса мощности:
входная мощность ≡ мощность потерь + полезная мощность выхода.
Естественно определить термодинамический коэффициент полезного действия в виде
![]() (18)
(18)
В тензорном анализе систем Г.Крон активно использует «электрический» язык и записывает уравнение напряжения в виде:
e = z · i, где z — импеданс. (19)
Уравнение тока в виде:
I = Y · E, где Y — адмиттанс. (20)
Понятия «импеданс» и «адмиттанс» мы лишь слегка затронули в главе «Технологии». Здесь мы хотим показать связь между этими понятиями и соответствующими величинами, к которым мы уже привыкли. Для этой цели нам придется дать физическую интерпретацию «импеданса» z и «адмиттанса» Y, показав в явном виде их же связь с различными видами сил.