

- •Студентам, приступающим к изучению книги
- •Предисловие для преподавателя
- •1. Зачем эта книга?
- •2. Что является особенностью книги?
- •3. Как устроена книга?
- •4. Как работает книга в помощь студенту?
- •Предисловие для студента
- •Почему студент должен взяться за изучение
- •2. Постановка проблемы необходимости перехода к устойчивому развитию
- •Основные выводы
- •Устойчивое развитие включает две группы понятий:
- •Что сохраняется и что изменяется в условиях устойчивого развития?
- •Принцип устойчивого развития (одобренный оон в 1987 г.)
- •1. «Устойчивое развитие подразумевает удовлетворение потребностей современного поколения, не угрожая возможности будущих поколений удовлетворять собственные потребности.
- •Состояние на 2000 год
- •3. Факторы, препятствующие и способствующие устойчивому развитию
- •Восемь факторов, дающих возможность увидеть сложность проблемы
- •Возможная планетарно-космическая критическая ситуация, обусловленная пространственной ограниченностью Земли и существующим ростом потребления
- •Накопления свободной энергии,
- •Рассеивания свободной энергии.
- •1) Их предъявить и показать, как они связаны с фундаментальными законами природы;
- •2) Показать, как эти законы проявляются в истории Человечества и особенно в критических ситуациях, конфликтах и войнах;
- •3) Предъявить их в форме, допускающей согласование с ними практической деятельности во всех предметных областях.
- •4. Определение предмета и метода проектирования устойчивого развития в системе природа—общество—человек
- •Проектирование как процесс превращения н евозможного в возможное
- •В чем принципиальная особенность метода?
- •Все базовые понятия системы природа—общество—человек являются группой преобразования с инвариантом мощность.
- •Что это дает практике?
- •Как же быть?
- •Заключение
- •Либо развитие, — согласованное с законами Природы, основанное на повышение эффективности использования природных ресурсов, т.Е. За счет уменьшения потерь.
- •Основные понятия
- •Вопросы
- •Задания
- •Рекомендуемая литература
- •Часть I Мировоззрение
- •Базовые понятия.
- •Что же является целью науки?
- •2. Отношение: научное и интуитивное мировоззрение
- •Что есть мировоззрение?
- •Имеет место активное взаимодействие:
- •3. Общеобязательность выводов научного мировоззрения
- •4. Что такое знание и научное знание?
- •Что есть знание? Знание
- •Что есть научное знание? научное знание
- •5. Требования доказуемости знания
- •Требования измеримости знания
- •6. О логике проектирования
- •7. О существовании универсальной основы и меры знания
- •8. О развитии научного мировоззрения
- •Заключение
- •Основные понятия
- •Вопросы
- •Задания
- •Глава 2 Суть и устройство научного знания
- •1. Как из «моря данных» выудить знание?
- •2. Как выделить научное знание?
- •Знание — это единство формы (вопроса) и содержания (ответа)
- •3. Состав элементов знания
- •4. Последствия разрыва связей. Разрывы в элементах знания
- •Последствия разрыва связей между элементами знания
- •Разрывы в содержании научного знания Содержание научного знания
- •Последствия разрыва связей между различными науками:
- •Разрывы в инструментах знания: мировоззрение—теория—технология—проектирование
- •Основные понятия
- •Вопросы
- •Задания
- •1. Исходная позиция
- •Ключевой вопрос: Так на каком же языке разговаривает с нами природа?
- •Отсутствие необходимых знаний о системе универсальных, устойчивых мер.
- •Отсутствие необходимого понимания системы общих законов природы, выраженных в универсальных мерах.
- •Отсутствие необходимых навыков (умения) согласовывать деятельность в различных предметных областях с законами природы.
- •2. Проблемное поле
- •Что измерять и как измерять? Мера
- •Как связаны меры?
- •3. «Нельзя объять необъятное»
- •4. Истоки. Научное наследие
- •Заключение
- •Основные понятия
- •Вопросы
- •Задания
- •Ключевые вопросы:
- •«Атомистика» и развитие
- •3. «Хаос» и «порядок»
- •От идеи «Атомистики» к идее Развития
- •О пространственно-временном противоречии движения
- •Связь аксиом математики с диалектической логикой
- •О связи пространства—времени—движения
- •К ак связаны Пространство–Время–Движение–Мера?
- •Пространство—время—движение как универсум
- •7. О пересечении мира математики и мира действительной природы
- •Что можно складывать и что складывать нельзя?
- •Количество, качество и мера
- •Что такое мера в философии? Мера — единство качества и количества.
- •Глава 5 Суть проблемы в основаниях математики
- •Почему человечество создало математику?
- •Почему математика устроена аксиоматически?
- •Почему знание математики не гарантирует умеhия ей пользоваться в конкретном проектировании систем?
- •Что такое мера Лебега? Обобщение понятия длина
- •Как пространственные меры математики
- •Измерение — наука
- •Геометрия и хронометрия
- •Задания
- •Глава 6 Естественно-научная суть проблемы
- •Ключевой вопрос:
- •1. Куда девается энергия, излучаемая планетами?
- •Андрей Белый
- •2. Эмпирические обобщения в.И.Вернадского
- •3. Принцип устойчивой неравновесности
- •Эрвин Бауэр (1890—1937)
- •Общая теория живой материи.
- •Теория жизненных явлений.
- •4. Можно ли вывести этот постулат из второго закона термодинамики?
- •5. Мера в физике
- •6. О взаимодействии Земли с космическими потоками энергии
- •7. Земля как идеальная машина
- •Глава 7 Гуманитарная суть проблемы
- •1. Ключевой вопрос
- •2. Становление как ключ к пониманию рождения нового
- •3. Творчество как акт сотворения будущего
- •5. Устойчивое развитие как обобщающая идея образования
- •6. Определение проектологии устойчивого развития как логики проектирования изменений в системе природа—общество—человек
- •7. О специальности «проектология устойчивого развития»
- •8. Отличительный признак специальности
- •Основные понятия
- •2. Почему нужно измерять?
- •Раздел I
- •Раздел II
- •Естественно-научные основы теории системы природа—общество—человек
- •Глава 8 Стандарты описания
- •Стандарт описания структуры прикладной научной теории.
- •Стандартные требования к прикладной научной теории.
- •Стандартные этапы создания прикладной теории.
- •Критерии истинности
- •Что такое научная теория Научная теория:
- •2. Стандартные требования к прикладной научной теории
- •Требования к языку теории
- •Требования к аксиоматике теории
- •Требования к правилам вывода
- •2. Стандартные этапы создания прикладной научной теории
- •Глава 9 Физика
- •Ключевые вопросы:
- •1. Система пространственно-временных величин
- •Бартини Роберт Людвигович (1897—1974)
- •Обобщенные свойства системы lt
- •2. Меры Пространства
- •3. Меры Времени
- •4. Стандартное изображение законов природы в системе lt
- •Связаны с мерами Времени?
- •Их связь с временными мерами в форме:
- •Алгоритм связей пространственных и временных мер
- •Система lt как координатная система (сеть)
- •Иерархия величин
- •С мощностью в вершине
- •5. Энергия и мощность
- •Свободная и связная энергия
- •Температура и энтропия
- •Связь свободной энергии с потенциальной и кинетической
- •Переход «потенциальной» энергии в «кинетическую» и наоборот связан с изменением знака направления движения потока;
- •Величина потока свободной энергии при переходе потенциальной энергии в кинетическую и наоборот остается постоянной.
- •6. Замкнутые и открытые системы
- •Открытая
- •Уравнение мощности
- •Проекции мощности как n-матрицы
- •7. Закон сохранения мощности
- •8. Равновесные и неравновесные системы
- •Диссипативные и антидиссипативные процессы
- •9. Механизм устойчивой неравновесности
- •10. Неустойчивое равновесие и развитие
- •Заключение
- •Основные понятия
- •Вопросы
- •Задания
- •Рекомендуемая литература
- •Глава 10 Химия
- •Ключевые вопросы
- •Как меры химии связаны с мерами lt?
- •1. Фотохимические преобразования
- •2. Фотоэффект и радиационная теория катализа а.Эйнштейна
- •3. Не является ли кинетическая энергия молекул лишь проявлением поглощенных фотонов?
- •4. «Плененное» излучение
- •5. Формы проявления фотона
- •6. Механизм взаимодействия фотонов с молекулой (атомом)
- •7. Эффект нагревания и химическая реакция
- •8. Резонансные частоты фотоэффекта
- •9. Энергия активации
- •10. О митогенетическом излучении и сохранении мощности
- •Заключение
- •Рекомендуемая литература
- •Глава 11 Биология
- •Принципиальные различия
- •Вынужденные процессы
- •Доминирующие процессы
- •Альтернатива: «Порядок — хаос» или «свободная — связная мощность»
- •Постулаты Бауэра и автоколебания
- •О принципе Лешателье
- •Сохранение и усиление мощности
- •Переход от классической термодинамики к электродинамике г.Крона
- •Заключение
- •В эволюции неживой природы, предшествовавшей возникновению жизни, доминировали процессы уменьшения свободной энергии, что приняло форму второго закона термодинамики.
- •Оба эти процесса определяют разнонаправленную эволюцию неживой и живой природы и находятся под контролем закона сохранения мощности, который г. Крон выразил следующим образом:
- •Глава 12 Глобальная эволюция
- •3. Глобальный процесс
- •Таким образом:
- •Механизм роста
- •Механизм развития (естественный отбор)
- •Механизм ускорения развития — конкурентная борьба
- •Неустойчивое равновесие третьего рода (бифуркация)
- •Магистраль эволюции
- •Заключение
- •Основные понятия.
- •Вопросы
- •Задания
- •Глава 13 Человек
- •Зачем природе Человек?
- •Труд по природе своей космичен.
- •Границы выживания индивида
- •Как работает «устройство», обеспечивающее «целесообразное» поведение?
- •Первая потребность
- •Возникновение речи
- •Первый трудовой акт: меры
- •Элементарная схема производственного цикла
- •Мышление
- •Развитие
- •Творчество по природе своей космично.
- •Заключение
- •Глава 14 Человечество
- •Закон экономии времени
- •Единица измерения
- •Бюджет социального Времени
- •Определение закона экономии времени
- •Граница
- •Закон роста полезной мощности
- •Основные определения
- •Балансовые уравнения взаимосвязей системы «Человечество—Природа»
- •Экстенсивный рост
- •Интенсивный рост (или развитие)
- •Классификатор идей
- •Непрерывность процесса развития
- •Человек — общество — развитие
- •Оценка идей по их вкладу в развитие
- •Хроноцелостность процесса развития
- •Устойчивое развитие
- •Устойчивое развитие и мощность потерь
- •Неисчезающие потребности
- •Эталон Личности
- •Потребность «взять» и потребность «отдать»
- •Как связаны понятия потребности, интересы, намерения и цели социальных субъектов с величиной их реальных возможностей?
- •Цель исторического развития
- •Неустойчивое развитие
- •Стагнация, деградация, гибель
- •Чем объяснить существование объединений людей, интересы и цели которых находятся в противоречии с потребностями общества в целом?
- •6. Долгосрочный прогноз критических ситуаций в отношениях Человечество—природа
- •Право Человечества жить в гармонии с Космосом
- •О кодексе прав Человечества
- •Основные понятия
- •Вопросы
- •Рекомендуемая литература
- •Постулат существования
- •Постулат сохранения
- •3. Постулаты изменения
- •Научные основы теории устойчивого развития в системе природа—общество—человек
- •Базовые понятия
- •Глава 15 Технологии
- •1. Общие принципы технологий жизнеобеспечения
- •Сохранение сбалансированности;
- •Повышение эффективности.
- •2. Сохранение сбалансированности
- •Её имя космический корабль «Земля». Внешние данные:
- •Как повысить эффективность?
- •Соотношение затраты/результаты работы Человека при выращивании и сборе урожая зерновых в Древнем Египте и Китае (1 тыс. Лет до н.Э.)
- •Страны ес на 2000 г.
- •4. Общий принцип классификации технологий
- •5. Закон научно-технического прогресса:
- •6. Общий классификатор технологий (рис. 15.2)
- •7. Технологии развития:
- •Распределение потока энергии сгорающего в двигателе топлива
- •Т ехнологии замещения
- •Устойчивое развитие (21122)
- •Заключение
- •Основные понятия
- •Задания
- •Рекомендуемая литература:
- •Глава 16 Экология
- •Как измерить динамику глобальной системы, окружающей Человека?
- •Человечество—природа;
- •Человек—природа;
- •Человек—Человечество.
- •Что такое мера в экологии?
- •Как меры экологии связаны с lt?
- •Что является мерой базовых понятий в экологии?
- •Как связаны меры экологии между собой в системе lt?
- •2. Минимальная модель «Человечество—Природа»
- •3. Блок «человечество»
- •4. Блок «живое вещество»
- •5. Блок «неживое вещество»
- •6. Модель «Человек—общество—природная среда»
- •Что является мерой основных понятий социальных систем? (Человек — Человечество)
- •Как связаны меры социальных понятий между собой в систме lt?
- •7. Блок «человек»
- •9. Блок «сектор обеспечения населения» (он)
- •10. Основные уравнения и формульные соотношения
- •Потенциал живого вещества биосферы:
- •Основные понятия
- •Задания
- •Глава 17 Экономика
- •Меры экономики и их связь с Пространственно — Временными мерами
- •Что такое мера в экономике?
- •Как меры экономики связаны с lt?
- •Что является мерой базовых понятий экономики?
- •Как и в предыдущих главах, покажем (рис. 17.1) Как связаны меры основных понятий экономики между собой и с другими мерами системы lt?
- •Стоимость и производительность труда
- •«Творчество» как фактор устойчивого экономического развития
- •Минимум затрат энергии
- •Качество организации
- •Потенциальная возможность
- •Реальная возможность
- •Экономическая возможность
- •Время удвоения
- •Экономические законы
- •Теперь нетрудно показать связь прибавочной стоимости, потребления и отходов:
- •«Чем меньше отходов, тем больше доходов».
- •10. Связь с принципами экономикс
- •Они становятся инвариантами — общими принципами
- •Общеобязательными для всех.
- •Принцип 3
- •Рациональный человек мыслит в терминах предельных изменений.
- •Обычно рынок — прекрасный способ организации экономической деятельности
- •Принцип 8 Уровень жизни населения определяется способностью страны производить товары и услуги.
- •Количество товаров и услуг, произведённых в течение одного рабочего времени и выраженных в единицах мощности — есть производительность.
- •Цены растут тогда, когда правительство печатает слишком много денег.
- •Принцип 10 в краткосрочной перспективе общество должно сделать выбор между инфляцией и безработицей.
- •Производительность — первичный источник повышения уровня жизни. Увеличение количества денег — первичный источник инфляции.
- •Заключение
- •Основные понятия
- •Задания
- •Глава 18 Финансы
- •Постановка вопроса
- •Связь денежных и энергетических измерителей
- •Гипотеза 1
- •Повышение «линеаризации» между соп и полезной мощностью обеспечено учетом структурных параметров эффективности:
- •Выводы:
- •Сводка критериев
- •(Ресурсы) (объекты)
- •Принципиальный механизм защиты инвестиций от рисков неэффективного управления развитием
- •Здесь существенно то, что коэффициент конвертации может быть установлен один раз, а дальше «работает» изменение величины обеспечения инвестиций (полезная мощность).
- •Риск как величина возможных потерь инвестора
- •Рейтинг с учетом риска неэффективного управления развитием
- •Штрафные санкции как компенсация возможных потерь инвестора
- •Введением штрафных санкций, увеличивающих долю полезной мощности, переходящей в собственность инвестора;
- •Поощрение роста эффективности управления развитием
- •Заключение
- •Основные понятия
- •Вопросы
- •Задания
- •Рекомендуемая литература
- •Глава 19 Политика
- •Власть, деньги и идеи
- •Золотое обеспечение
- •Неустойчивость обеспечения финансового рынка
- •Об одном потенциальном источнике финансирования перемен
- •Освобождение от нужды
- •Идея устойчивого развития как политическая цель любого общества
- •Критические периоды в естественно-историческом процессе. Связь с войнами
- •Определение критического периода
- •Условия «победы» и «поражения»
- •Темпы роста возможностей новой системы должны быть выше темпов роста возможностей старой системы.
- •Расстояние до критического периода
- •Ответственность политики и устойчивое развитие человечества
- •Оценка вклада политики в устойчивое развитие
- •Кто сегодня в мире несет ответственность за устойчивое развитие Человечества?
- •Теория Права и конфликты
- •Закон и интересы
- •Связь интересов и целей с ростом возможностей
- •Классификатор возможных целей
- •Личные цели и цели Человечества
- •Семь типов целей и спектр интересов
- •Определение портрета и политического курса страны
- •Вес страны на мировой арене
- •Развитость страны
- •Внешние и внутренние интересы
- •Заключение
- •Выводы из уроков истории
- •Основные понятия
- •Вопросы
- •Задания
- •Рекомендуемая литература
- •Базовые понятия:
- •Глава 20
- •1. Инженер, как конструктор прикладной научной теории
- •2. Н. Бурбаки и аксиоматический метод
- •3. О.Веблен и проективная геометрия
- •4. Инженер делает первую попытку проектировать
- •Процедура № 1 Список предсказаний
- •Процедура № 2
- •Процедура № 3 Список терминов на основе списков № 1 и № 2
- •5. Анри Лебег и понятие величина
- •6. А.Эйнштейн и «вероятностные» модели времени
- •7. К теории разработки прикладных теорий
- •Основные понятия
- •Вопросы
- •Задания
- •Рекомендуемая литература
- •Глава 21 Суть логики проектирования
- •План изложения
- •1. Ключевые вопросы
- •Зачем – Почему?
- •Зачем — почему? или с чего начать проектирование?
- •Проблема целеполагания в системе природа—общество—человек
- •Зададим себе вопросы:
- •Использование мощности в качестве инварианта дает возможность соизмерять цели социальных систем в их взаимной связи с динамикой эволюции природных систем.
- •Цели в форме, допускающей эффективный контроль
- •Поэтому полезно: рассматривать цель как средство
- •Возможные препятствия на пути
- •Тензор соединения
- •Изоморфизм закона сохранения мощности в системе природа—общество—человек
- •3. Кто будет проектировать и кто будет пользоваться результатами?
- •Задачи, решаемые с помощью базы научных знаний
- •Организованные множества
- •Проекции инварианта мощность по содержанию знания
- •Устройство базы научных знаний
- •Исходная база.
- •2. Конечная база
- •Построение базы научных знаний
- •Определение правил-критериев
- •Условные обозначения:
- •Анализ субъектов–участников это анализ изменения соотношения их возможностей и обязательств.
- •Если, если, если то [делается вывод-предсказание]
- •В приведенном примере логически возможны тридцать исходов:
- •Условные обозначения:
- •Реквизитами любой работы являются:
- •Портрет работы: Базовый элемент плана
- •Структура плана включает в себя:
- •Сеть как Проекция плана на плоскость
- •Длина плана
- •Ширина плана
- •Глубина плана
- •Реализуемость плана
- •Мощность плана
- •Риск неэффективного планирования развитием
- •Устойчивость плана
- •Эффективность плана
- •Заключение
- •Однако, если цель сформулирована плохо, то пути её достижения становятся неопределёнными. Выводы
- •Основные понятия
- •Вопросы
- •Задания
- •Рекомендуемая литература
- •Глава 22 Инварианты в технических системах
- •1.Понятие: «общая динамика машин».
- •2. Обобщенная машина как «канал», соединяющий источник мощности с нагрузкой
- •3. Амплитудно-частотные характеристики мощности
- •4. Пример передачи мощности в виде приводного ремня
- •5. Связь различных форм мощности (механической, электрической, волновой, тепловой)
- •6. Три вида сил — три уравнения движения
- •Заключение
- •Основные понятия
- •Вопросы
- •Задания
- •Рекомендуемая литература
- •Глава 23 Общие представления о методе проектирования сложных систем
- •1. Наш главный герой — тензор
- •2. Габриель Крон (1901—1968 гг.)
- •3. Краткая справка
- •4. Несколько положений, без которых сознательное освоение работ г. Крона невозможно
- •5. Основная идея г. Крона
- •6. Суть метода
- •7. «Постулат первого обобщения»
- •8. «Постулат второго обобщения»
- •9. Чем отличаются тензоры Крона от обычных тензоров?
- •Заключение
- •Вопросы
- •Задания
- •Рекомендуемая литература
- •Глава 24 Элементы тензорного анализа г. Крона
- •1. Элементы алгебры n-матриц Система обозначений
- •«Фиксированные» и «скользящие» индексы
- •Представление n-матриц более высоких размерностей
- •Действия с n-матрицами
- •Сложение
- •Умножение 1-матриц
- •Умножение 2-матриц с использованием «правила стрелки»
- •Умножение 2-матриц по правилу суммирования
- •Произведение любых двух n-матриц
- •Определители
- •Деление на 2-матрицы
- •Интегрирование
- •2. Разложение в степенной ряд
- •3. Обращенный степенной ряд
- •4. Тензор преобразования
- •Этапы анализа
- •5. «Инвариантность форм»
- •Ковариантные и контравариантные величины
- •6. Мультитензоры Формирование еще более сложных сущностей
- •7. Анализ и синтез сетей Типы задач
- •Вопросы
- •2.1. Числа, которые потрясли мир
- •2.2. Системность физических величин в системе lt-размерностей
- •Приложение 1
- •I. Алгоритм расчета тензорных сетей
- •1. Элементы сети
- •2. Задача расчета сети
- •3. Расчеты сетей из свободных ветвей
- •4. Расчеты сетей из связанных ветвей
- •5. Алгоритмы расчета сетей по частям
- •6. Пример расчета сети по частям
- •7. Пример тензорного представления сбалансированного взаимодействия предприятий
- •8. Тензорная форма уравнений баланса потоков
- •Литература
- •Приложение 2 Меры в системе lt
- •2.1. Числа, которые преобразили мир
- •1. Необходимое историческое отступление
- •2. «Гвозди», которыми математика «приколочена» к физике
- •3. В «перекрестиях» длины и времени
- •4. Таблица законов природы
- •2.2. Системность физических величин
- •(Из книги: Чуев а.С. «Физическая картина мира в размерности «длина — время»)
- •1. Введение
- •2. Системность взаимосвязей размерностей физических величин
- •Уточнение формулировки закона всемирного тяготения и. Ньютона
- •Выводы:
- •4. Анализ основных уравнений связи в системах си и Гаусса
- •Определение размерности основных электромагнитных величин в lt-системе размерностей
- •Определяющие зависимости и соотношения в ряду квантуемых физических величин
- •Значения фундаментальных физических постоянных
- •Анализ взаимосвязи электрических квантуемых величин с постоянной Планка
- •Размеры единиц измерения физических величин
- •Электромагнетизм в системе физических взаимодействий
- •Система взаимосвязей электрических и магнитных величин
- •Возможные направления экспериментальных проверок и практического использования обнаруженных закономерностей
- •Заключение
- •Рекомендуемая литература
- •Глоссарий некоторых терминов и понятий, используемых в книге
- •Гуманитарные науки
- •Темпы роста возможностей новой системы должны быть выше темпов роста возможностей старой системы.
- •Содержание программы
- •I. Мировоззренческие аспекты
- •3. Устойчивое развитие как проблема синтеза научных знаний
- •II. Теория
- •Раздел 1 Естественно-научные основы теории системы природа—общество—человек
- •8. Базовые понятия 4 ч
- •Стандарты описания:
- •Раздел 2 Научные основы теории устойчивого развития в системе природа—общество—человек
- •III. Метод
- •21. Методологические предпосылки проектирования сложных систем 8 ч
- •23. Общие представления о методе проектирования сложных систем
- •25. Специальные вопросы базы научных знаний
4. Пример передачи мощности в виде приводного ремня
Рассмотрим один простейший канал передачи мощности в виде приводного ремня — трансмиссии (рис. 22.6).
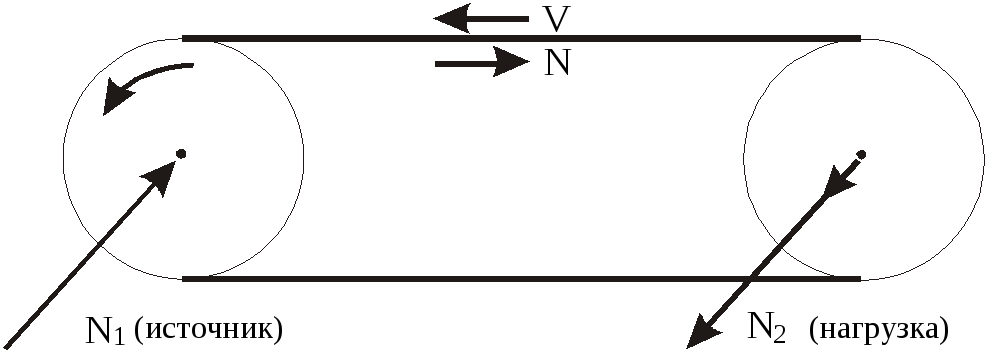
Рис. 22.6. Модель передачи мощности через приводной ремень
Мощность N1 (источника) передается через приводной ремень без диссипативных потерь на второй вал и снимается в виде мощности N2 (нагрузки). Академик А.М.Мандельштам приводил эту модель в своих лекциях по теории колебаний как изящную конструкцию, где материал ремня (верхняя часть) перемещается влево, а поток энергии идет через ремень вправо. Эта модель весьма проста, но она демонстрирует роль физических свойств используемого материала.
Модель демонстрирует существование верхней грани величины натяжения ремня. Действительно, если перейти верхнюю грань натяжения ремня, наступит разрушение материала.
Обозначим верхнюю грань натяжения Tmax. Эта величина дает верхнюю грань силы, которая действует на ремень. Величина передаваемой мощности будет равна произведению силы на величину скорости — V перемещения ремня:
N = T · V. (2)
Очевидно, что при максимальном натяжении Tmax и максимальной скорости Vmax перемещения ремня достигается верхняя грань величины передаваемой мощности − Nmax:
Nmax = Tmax · Vmax. (3)
Наша задача связана с определением Vmax, что позволит найти верхнюю грань величины передаваемой мощности.
Формально линейная скорость перемещения ремня ограничена только величиной скорости света, но мы догадываемся, что верхняя грань скорости перемещения ремня лежит где-то ниже.
Мы можем заметить, что линейная скорость ремня V не может превосходить скорости передачи мощности через ремень, так как эти две скорости направлены навстречу друг другу.
Теперь мы начинаем искать скорость передачи мощности через ремень — W.Эта величина легко находится из волнового уравнения. Скорость распространения волны упругой деформации равна:
![]() , (4)
, (4)
где T — натяжение ремня, ρ — плотность, а W — скорость распространения волны упругой деформации. Очевидно, что при Tmax мы получаем максимальную скорость движения волны упругой деформации через ремень, равную Wmax.
Попробуем приравнять линейную скорость ремня V этой величине Wmax. Оказывается, что в этом случае через ремень поток энергии будет равен нулю. Поток энергии будет равен нулю и в том случае, когда линейная скорость ремня V равна нулю.
Нетрудно
видеть, что максимум величины передаваемой
мощности будет достигаться при![]() .
.
Мы нашли максимальную линейную скорость ремня Vmax. Теперь мы можем найти и верхнюю грань величины передаваемой мощности:
Nmax = Tmax · Vmax. (5)
Однако, мы можем выразить через:
Tmax = ρ · W2max. (6)
И теперь величина передаваемой мощности может быть представлена в виде
Nmax
= ρ
W2max
· Vmax
=
![]() . (7)
. (7)
Достаточно воспользоваться таблицей физических величин, как сразу же обнаруживается погрешность полученного решения, связанная с «фигурой умолчания».
Размерность мощности в системе LT [N] = [L5T−5].
Размерность скорости в системе LT [W] = [L1T−1].
Размерность плотности в системе LT [ρ] = [M] : [L3] = [L0T−2].
[N] = [L5T−5] = [ρ] [W]3 = [L3T−5]. (8)
В левой части размерность [L5] в правой части [L3]: мы не заметили, что имели дело с величиной мощности, передаваемой через единичную площадку ремня, т.е. мы нашли не мощность, а мощность на единицу поперечного сечения ремня. Исправим нашу ошибку
![]() . (9)
. (9)
Этот результат естественен. Если увеличить поперечное сечение ремня, то при том же натяжении и при том же значении линейной скорости ремня может передаваться большая мощность (пропорциональная сечению ремня).
Этот пример преследовал цель показать тонкую математическую особенность систем передачи мощности через каналы обобщенной машины.
Для нахождения скорости распространения волны упругой деформации мы «решали» дифференциальное уравнение в частных производных второго порядка. Его решение (при закрепленном втором вале, связанном с нагрузкой) дает «стоячую волну» упругой деформации, являющуюся суперпозицией «прямой» и «отраженной» волны. Однако, это решение еще ничего не говорит о действительном процессе передачи мощности, который определяется новой переменной — V — линейной скоростью движения ремня.
Наличие этой независимой переменной приводит к тому, что в нашей задаче могут быть введены две системы координат: первая — жестко связанная с ремнем и вторая — жестко связанная с положением механизма.
«Наблюдатель» в первой системе координат наблюдает стоячую волну упругой деформации и «не замечает» переносной скорости движения ремня.
«Наблюдатель во второй системе координат, наблюдая наличие переносной скорости ремня, замечает различие в скоростях «прямой» и «отраженной» волны: «прямая» волна движется вправо со скоростью W — V, а «отраженная» волна движется влево со скоростью W + V.
Полусумма и полуразность этих скоростей позволяют находить значение скорости волны упругой деформации и переносной скорости порознь:
![]() , (10)
, (10)
![]() . (11)
. (11)
Эта операция может выполняться не только со скалярами, но и с матрицами.
Отсутствие «равенства» скоростей «прямой» и «отраженной» волн проявляется формально в том, что вторые производные зависят от порядка дифференцирования, т.е.
![]() , (12)
, (12)
где a и есть величина переносной скорости V, создающая различие скоростей «прямой» и «отраженной» волн.
Если величина a (а, следовательно, и переносная скорость) обращается в нуль, мы имеем дело с «консервативной» или «голономной» системой. Отличие величины a от нуля является мерой неголономности и мерой неинтегрируемости уравнений Пфаффа.
Действительное движение «прямой» и «отраженной» волн упругой деформации «маскируется» невыразительным понятием «энергия упругой деформации, исключающим динамику процесса.
Мы теперь видим связь с пропускной способностью этого канала. Нет ни одной машины, где за видимой простотой ее работы не стояло бы решение дифференциального уравнения в частных производных третьего порядка.