

19.1. Синхронні й асинхронні автомати
Стан si автомата А називається стійким, якщо зі стану (sh, xj) = si при будь-яких xj випливає співвідношення (si, xj) = si. Це означає, що якщо А перейшов у деЯкій стан під дією вхідного сигналу xj, то вийти з цього стану він може тільки при надходженні на його вхід іншого, відмінного від xj сигналу.
Автомат Мура називається асинхронним, якщо кожен його стан si S – стійкий. У противному випадку А – синхронний.
Приклад : Асинхронний автомат Мура.
Таблиця 19.1
|
S X Y |
s1 y1 |
s2 y3 |
s3 y2 |
|
x1 |
s2 |
s2 |
s2 |
|
x2 |
s3 |
s2 |
s3 |
|
x3 |
s1 |
s1 |
s3 |

Рис. 19.1. Асинхронний автомат Мура
Визначення. Два автомати з однаковими вхідними алфавітами називаються еквівалентними, якщо після установки їх у початкові стани реакції автоматів на будь-яке вхідне слово збігаються.
Вихідний сигнал Y називається стійким у стані sh, якщо зі відношення (si, xj) = ye і (si, xj) = sh випливає, що (sh, xj) = ye при всіх si і xj, для яких справедливі дві перших рівності.
Автомат Мілі називається асинхронним, якщо всі його стани і вихідні сигнали стійкі, у протилежному випадку він є синхронним.
19.2. Асинхронні автомати, що тактуються
Визначення. Асинхронні автомати, що тактуються, задовольняють умові:
вхідний алфавіт Х автомата А розбивається на дві підмножини
X’={х'1, х'2,…x’m} і X’’={х'’1, х'’2,…x’’e};
при подачі на А якої-небудь букви х'j Х’ існує не менш одного переходу автомата А в будь-якій стан;
будь-яка буква х''j Х’’ не викликає жодного переходу автомата А в новий стан і на виході з'являється порожній сигнал ”e”;
забороняється подача на вхід автомата А послідовностей, будь-які дві поруч розташовані букви яких є літерами підмножини Х’.
Приклад. Вхідна послідовність вигляду <х'1 х'’2 х'2 х'’1 х'’3 х'3 х'’2 х'1>.
Приклад. Автомат керування ліфтом, що обслуговує три поверхи. Натискання двох і більш кнопок неприпустимо.
:SXS, :SXY
Таблиця 19.2
|
S X |
s1 |
s2 |
s3 |
|
x1 |
s1/ - |
s1/y2 |
s1/y2 |
|
x2 |
s2/y1 |
s2 / - |
s2/y2 |
|
x3 |
s3/y1 |
s3/y1 |
s3/ - |
Тут y1- рух нагору, y2 - рух униз. Усі стани автомата стійкі, але вихідні сигнали – не стійкі, отже, автомат асинхронний.
19.3. Перетворення автоматів Мілі і Мура
Для будь-якого автомата Мура можна побудувати еквівалентний йому автомат Мілі і навпаки.
19.3.1. Перетворення автомата Мура в автомат Мілі
Побудова автомата Мілі виконується на підставі запізнення реакції автомата Мура у порівнянні з автоматом Мілі.
Нехай заданий автомат Мура АA = (SA, XA, YA, A, A, {s0A}), еквівалентний йому автомат Мілі АB = (SB, XB, YB, B, B, {s0B}) будується в такий спосіб:
SB : = SA,
XB : = XA,
YB : = YA,
B : = A,
s 0B: = s 0A.
B будується в такий спосіб, якщо в автоматі Мура (sі,, xj) = sh і A(sh) = ym, то в автоматі Мілі B(s і, xj) = ym.
При графічному способі завдання автоматів при переході від вихідного автомата Мура до еквівалентного автомата Мілі вихідний сигнал ym, записаний поруч з вершиною sh, переноситься на всі дуги, що входять у цю вершину.
При табличному способі завдання автоматів таблиця виходів еквівалентного автомата Мілі виходить з таблиці переходів вихідного автомата Мура заміною символу sh, що стоіть на перетинанні рядка xj і стовпця si, символом вихідного сигналу ym, що відрізняє стовпець sh у таблиці переходів автомата Мура.
Приклад. Вихідний автомат Мура (рис.19.2 ліворуч) і еквівалентний йому автомат Мілі (рис. 19.2 праворуч). Виконано перенос вихідних сигналів з вершин на вхідні в них дуги.
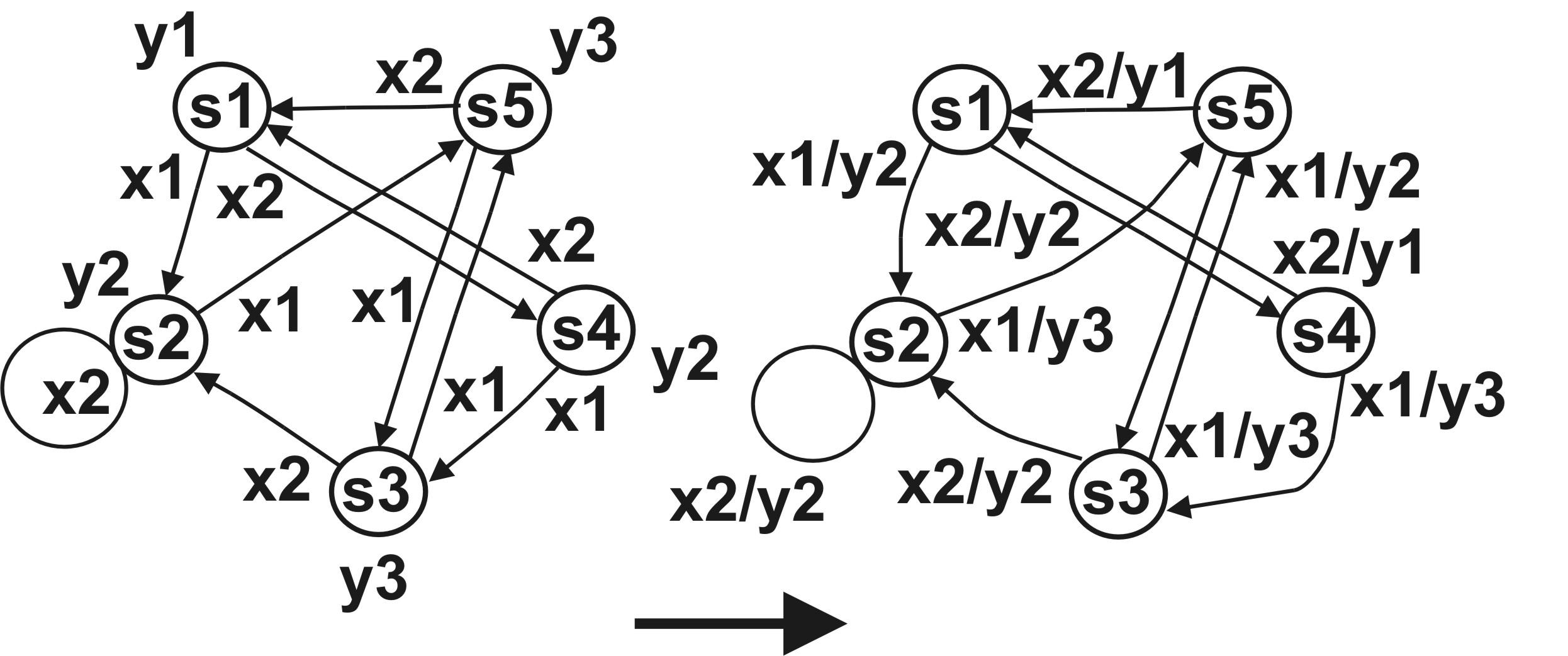
Рис. 19.2. Автомат Мура й еквівалентний йому автомат Мілі