

20.1.2. Послідовне з'єднання двох автоматів
Автомати A1 = (S1, X1, Y1, 1, 1, {s01}), A2 = (S2, X2, Y2, 2, 2, {s02}) задані шістками. Вихід першого автомата з'єднаний безпосередньо з входом другого автомата, тобто Y1 = X2.
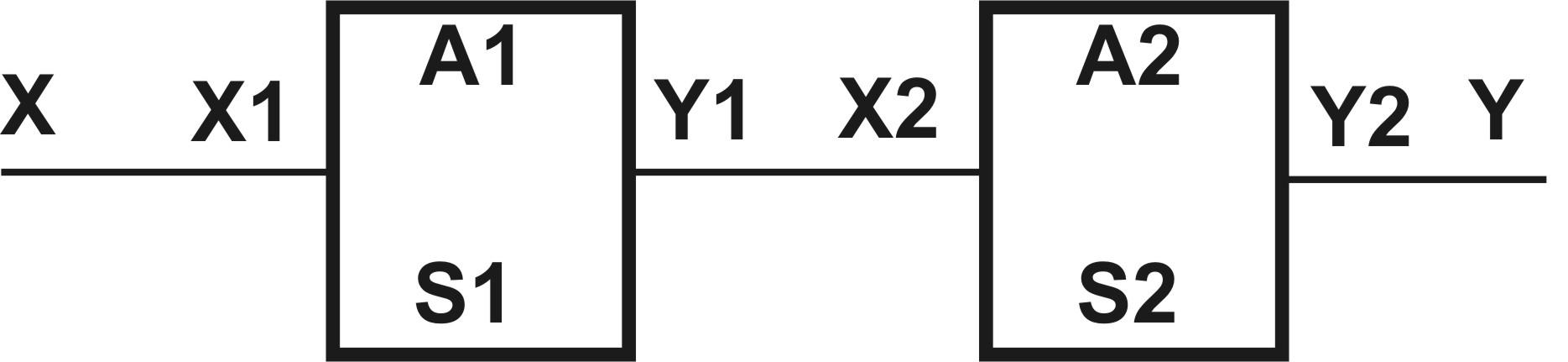
Рис. 20.2. Послідовне з'єднання автоматів
Визначення. Результуючим автоматом послідовного з'єднання двох автоматів A1 і A2 називається автомат A = (S, X, Y, , , {S0}), у якого
1. S = S1 S2, тобто S = {sS| s= < s1, s2> & s1, S1 & s2 S2 }.
2. X = X1.
3. Y1 = X2.
4. Y = Y2.
5. : SXS і визначається в такий спосіб:
(SX) = (SX) = ((S1X1), (2(S2X2)) чи (SX) = {s = (s’, x)(SX)| s' = <s1’, s2’ > & s= <s1, s2> & x X & s1 = = (s1’, x) & s2 = 2(s2’, 1(s1’, x)} .
6. : SXY і визначається так:
(SX) = (SX) = 2(S21(S1X )) чи (SX) = {y= =(s’, x)Y| s' = <s1’, s2’> & xX & y = 2(s2’, 1(s1’, x))} .
7. s0 = <s01, s02>.
Приклад. Задані автомати Мілі A1 і A2 з попереднього прикладу.
Функція переходів результуючого автомата :SXS
Таблиця 20.6
|
S/S1S2 X |
s1 |
s2 |
s3 |
s4 |
s5 |
s6 |
|
s11s21 |
s11s22 |
s12s21 |
s12s22 |
s13s21 |
s13s22 | |
|
x1 |
s1/s11s21 |
s2/s11s22 |
s2/s11s22 |
s1/s11s21 |
s4/s12s22 |
s3/s12s21 |
|
x2 |
s5/s13s21 |
s6/s13s22 |
s5/s13s21 |
s6/s13s22 |
s3/s12s21 |
s4/s12s22 |
Функція виходів результуючого автомата :SXY
Таблиця 20.7
|
S/S1S2 X |
s1 |
s2 |
s3 |
s4 |
s5 |
s6 |
|
s11s21 |
s11s22 |
s12s21 |
s12s22 |
s13s21 |
s13s22 | |
|
x1 |
y1/y11y21 |
y2/y11y22 |
y2/y12y21 |
y3/y12y22 |
y2/y12y21 |
y3/y12y22 |
|
x2 |
y1/y11y21 |
y2/y11y22 |
y1/y11y21 |
y2/y11y22 |
y1/y11y21 |
y2/y11y22 |
Початкові стани для A1 і A2 - s01 = s11 і s02 = s21, для А початковий стан – s1 = <s11, s21>
20.1.3. З'єднання зі зворотним зв'язком
Задано автомати A1 = (S1, X1, Y1, 1, 1, {s01}) і A2 = (S2, X2, Y2, 2, 2, {s02}) і КС (автомат з одним станом) A3 = ({X3X4}, {s03}, Y3, 3).
У випадку з'єднання зі зворотним зв'язком принаймні один з автоматів A1 чи A2 повинен бути автоматом Мура, інакше стабільність системи не гарантується, тому що інакше буде Y(t) = fc(S(t)(X(t)Y(t))), що приводить до виникнення генерації.
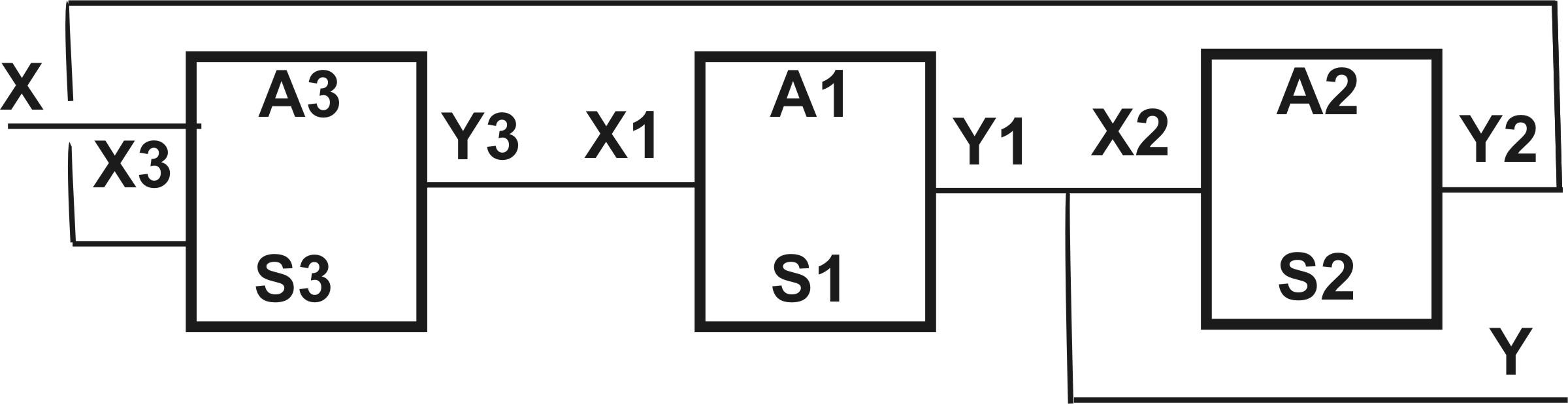
Рис. 20.3. З'єднання автоматів зі зворотним зв'язком
Визначення. Нехай A2 – автомат Мура. Результуючим автоматом з'єднання двох автоматів зі зворотним зв'язком називається автомат A = (S, X, Y, , , {s0}), у якого
1. S = S1S2
2. X = pr1X3
3. Y2 = pr2X3
4. Y = Y1 = X2
5. Y3 = X1
6. : SXS і визначається в такий спосіб:
(SX) = (1(S1X1), (2(S2X2)) чи (SX) = {s=(s’, x) (SX)| s'= <s1’, s2’ > & s= <s1, s2> & xX & s1 = =1(s1’, 3(x, 2(s2’))) & s2=2(s2’, 1(s1’, 3(x, 2(s2’))))}
7. : SXY і визначається так:
(SX)=1(S13(X2(S2))) чи (SX)={y=(s’, x)(S, X)| s'=<s1’, s2’> & xX & y=1(s1’, 3(x, 2(s2’)))}
8. s0 = <s01, s02 >.
Приклад. Задані два автомати A1 – Мілі. A1 = (S1, X1, Y1, 1, 1, {S01}), A2 – Мура A2 = (S2, X2, Y2, 2, 2, {S02}).
Функція переходів-виходів автомата Мілі 1:S1XS1; 1:S1XY1:
Таблиця 20.8
|
X1\S1 |
s11 |
s12 |
s13 |
|
x11 |
s13/y11 |
s12/y12 |
s13/y11 |
|
x12 |
s12/y13 |
s11/y11 |
s11/y12 |
Функція переходів-виходів автомата Мура 2:S2XS2 ; 2:S2Y2:
Таблиця 20.9
|
S2/Y2 X2 |
s21 |
s22 |
|
y21 |
y22 | |
|
x21 |
s21 |
s22 |
|
x22 |
s22 |
s22 |
|
x23 |
s21 |
s21 |
КС – автомат без пам'яті A3 перетворить 3 :XY2Y3=X1 (табл. 26.10). A3=(S3 = {s03}, {XY2}, Y3=X1, 3(S3{XY2})={s0}, 3(S3{X Y2}), {s03})
Таблиця 20.10
|
Y2\X |
x1 |
x2 |
x3 |
|
Y21 |
x11 |
x11 |
x11 |
|
Y22 |
x12 |
s12 |
x11 |
Автомат А має X={x1,x2,x3}, Y={y1,y2,y3}, S=S1S2={<s11,s21>, <s11,s22>, <s12,s21>, <s12,s22>, <s13,s21>, <s13,s21>}={s1,s2,s3,s4,s5,s6}.
Функція переходів :SXS
Таблиця 20.11
|
S/S1S2 X |
s1 |
s2 |
s3 |
s4 |
s5 |
s6 |
|
<s11,s21> |
< s11,s22> |
<s12,s21> |
<s12,s22> |
<s13,s21> |
<s13,s22> | |
|
x1 |
s5/s13s21 |
s3/s12s21 |
s4/s12s22 |
s4/s12s22 |
s5/s13s21 |
s2/s11s22 |
|
x2 |
s5/s13s21 |
s3/s12s21 |
s4/s12s22 |
s2/s11s22 |
s5/s13s21 |
s2/s11s22 |
|
x3 |
s5/s13s21 |
s6/s13s22 |
s5/s13s12 |
s6/s13s22 |
s5/s13s21 |
s6/s13s21 |
Функція виходів :SXY
Таблиця 20.12
|
S/S1S2 X |
s1 |
s2 |
s3 |
s4 |
s5 |
s6 |
|
<s11s21> |
< s11s22> |
<s12 21> |
<s12 s22> |
<s13 s21> |
<s13 s22> | |
|
x1 |
y1/y11y21 |
y3/y13y22 |
y2/y12y21 |
y1/y11y22 |
y1/y11y21 |
y2/y12y22 |
|
x2 |
y1/y11y21 |
y3/y13y22 |
y2/y12y21 |
y1/y11y22 |
y1/y11y21 |
y2/y12y22 |
|
x3 |
y1/y11y21 |
y1/y11y22 |
y2/y12y21 |
y2/y12y22 |
y1/y11y21 |
y1/y11y22 |
Початковий стан для А s0=<s01, s02>.