

4.5. Гомеокінетичне плато інтелектуальної системи
Як відомо, постійності стійкого стану замкнутої системи можна досягнути, якщо використовувати негативний зворотний зв’язок. У зв’язку з орієнтацією нашого матеріалу на відкриті системи, необхідно врахувати наступне.
Всі системи високого рівня складності існують як процеси. Для них вже не можна нехтувати часовим чинником їх існування (окрім деяких методологічно обґрунтованих випадків аналізу часткових подробиць), бо вони в кожен момент знаходяться в стані нерівноважності–гомеокінезу. Для таких систем існує тільки стан динамічної рівноваги, до якого вони прагнуть, але в якому ніколи не можуть “статично зафіксуватися”.
У термодинамічній кібернетиці вважається, що процеси обробки інформації, як і процеси введення енергії, в систему мають на своїй меті зупинити тенденцію переходу системи в стан із більшою ентропією. Ці процеси можна розглядати як спроби системи досягти стану рівноваги і зберегти його, тобто перебувати в межах “інформаційного гомеокінетичного плато”. За подробицями такого розгляду в термодинамічному припущенні ентропійно-негентропійного балансу можна звернутися до [22], ми ж розглядаємо відоме поняття гомеокінетичного плато в прив’язці до інтелектуального управління, до процесу СУО.
На рис. 4.1 приводиться ілюстративне зображення такого плато “в просторі його існування”. Відразу обмовимося – саме ілюстративне, бо малюнок в своїй основі запозичений з “сигнального” підходу, а ілюструє підхід “структурний”.
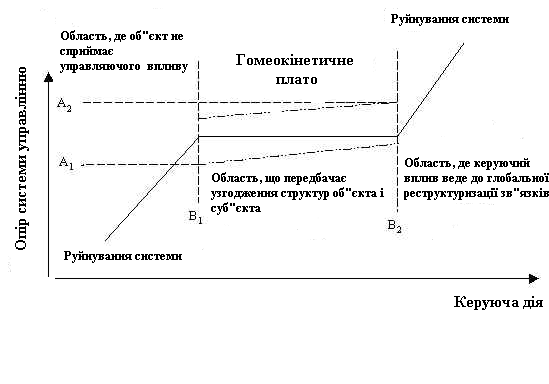
Рис. 4.1 Ілюстративне зображення гомеокінетичного плато
Якщо в сигнальному варіанті ми маємо деякі кількісні оцінки і, відповідно, якусь метрику простору існування гомеокінетичного плато, то, в нашому випадку, структурні перетворення в базі вимагають тільки топологічного простору, що “ближче до Природи”, але не ілюстроване в метриці. Проте, ми чекаємо від цієї ілюстрації деякої користі для пояснення висловлюваного матеріалу.
Отже, по горизонталі ми відкладаємо “величину” сумарної дії на інтелектуальну систему, що управляє, яка складається з розузгодження структур “знання - дані” в об’єкті і суб’єкті, вноситься зовнішніми як керівними, так і збурюючими інформаційними потоками. По вертикалі відкладається аналогічна “величина” для внутрішнього управління станом системи в припустимих межах на кожній точці плато. В результаті плато є не лінією, а деякою “смугою”, безліччю станів, в яких може існувати система.
Порівняно зі системою стабілізації, плато А1, А2, В1, В2 визначає діапазон можливої зміни стану системи без її руйнування при сумарній вхідній дії. Порівняно з резонансною системою вказане плато – деякий показник, що визначає її смугові характеристики.
Зліва від В1 існує галузь руйнування системи при втраті нею “накопиченого досвіду” – класичний випадок деструкції, як втрати нормальної структури. Справа від В2 є галузь, яку краще всього порівнювати з ситуацією перерегулювання, тобто з випадком коли зміна структури настільки велика, що це веде до практичної втрати наявної “форми” чи “образу” системи.
Діапазон А1-А2 у деякому сенсі може бути пояснений як ділянка стабілізації з відповідними наслідками виходу з неї при деяких непередбачених “значеннях” внутрішнього управління. Для інтелектуальної системи діапазон А1-А2 – галузь “життя”, галузь “зрозумілого, відносно мети існування, трактування чи реакції на зміни структури зв’язків”
Для системи в структурі СУО гомеокінетичне плато існує як сукупність плато суб’єкта і об’єкта, прагнучих до “узгодженого” існування, як галузь, де досяжне узгодження структур суб’єкта і об’єкта. Якщо ж кожну інформаційну складову розглядати як окрема дію, що управляє, то може йтися про безліч гомеокінетичних плато, що характеризують кожну складну систему. Такого роду аналіз необхідний при постановці завдання дослідження стійкості системи під впливом різних інформаційних збурень.
“Узагальнене інтелектуальне управління” може бути, таким чином, визначене через дві його завдання:
завдання стабілізації досягнутого стану, як внутрішня функцію системи, спрямована на те, щоб утримувати її на гомеокінетичному плато протягом максимального можливого часу;
завдання переходу в новий стан, коли поняття управління може бути розширене аж до забезпечення переходу системи з одного гомеокінетичного плато на інше, точніше “з однієї групи плато на деяку іншу групу”.
Перше завдання в своїй постановці (але не реалізації!) є еквівалентом класичної схеми управління зі зворотним зв’язком для складних систем при заміні сигнальної парадигми управління структурною. Її рішення корисне для забезпечення поточної внутрішньої реструктуризації системи, реалізація якої утримує систему на гомеокінетичному плато. На відміну від систем із зворотним зв’язком, тут “стан рівноваги” утримується не превалюванням зворотного зв’язку над позитивним, а відхиленням структур об’єкта і суб’єкта не більше ніж у деякому діапазоні розузгодження, що допускає їх зіставлення і взаємну реструктуризацію.
Друге завдання, в принципі зрозуміле на постановочному рівні, веде нас до поняття метаструктури, узагальнюючого можливе різноманіття структур даних деякої множини систем. Її розгляд є важливим напрямом наукового пошуку і може бути рекомендоване для глибокого опрацювання на основі матеріалів третьої частини книги.
З поняттям гомеокінетичного плато в контексті інтелектуальних систем управління тісно зв’язана ідея про те, що для кожної системи існує оптимальне дозування управляючих дій. Це означає, що жодна система не в змозі прийняти інформацію в структурі, що змінює вже наявну більш ніж у деяких “межах”. Саме за допомогою такого дозування система утримується в “мінливій галузі стійкості”.
Недостатнє управління може вивести систему в нестабільний стан унаслідок “зриву динаміки її існування”. У разі недостатнього управління ми знаходимося як би в галузі дії “позитивного зворотного зв’язку”, що може привести систему до повного руйнування. Введення ж в систему надмірних управляючих дій, пригнічує сенс інтелектуального управління, веде до насильницького переналагодження структур без процесу їх осмислення.
Цілком реальна можливість визначення меж стійкості при роботі з інтелектуальними базами (див. р. 5) дозволяє, при визначенні інтелектуального управління прийнятому в теорії ІСУ, використовувати ці межі для забезпечення необхідного втручання з метою підтримки існування системи.
Нагадаємо, що тут йдеться про структурну парадигму управління, тобто про управління, пов’язане із зміною і перетворенням структури інтелектуальної бази в циклі СУО. Гомеокінетичне плато тут виявляється як галузь малих розузгоджень і перетворень структур. Зрозуміло, що “припустиме управління” зводиться до поступової зміни системи в межах існуючого плато, а “оптимальне за швидкодією” – до радикального переведення системи в інший структурний стан, тобто на інше гомеокінетичне плато. Звідси стає зрозумілим і підхід до визначення стійкості складної системи як прогнозування її реакції на спробу кардинальної зміни її структури – образу (моделі), накопиченого за час її існування {87. В принципі, за матеріалами цього розділу можна написати окрему книгу, але ми залишаємо поки що все в даному обсязі пояснень, рекомендуючи тільки повернутися до цього матеріалу після прочитання частини III.}.