

§ 11 Момент сили відносно осі
Момент
сили відносно осі
– це алгебраїчна величина, яка дорівнює
алгебраїчному моменту проекції сили
на площину, перпендикулярну до осі,
відносно точки перетину осі з площиною:
![]() .
.
Отже,
щоб визначити момент сили
відносно осі
![]() (рис. 22, а), необхідно:
(рис. 22, а), необхідно:
1. Провести площину, перпендикулярну до осі (на рис. 22, б такою площиною є площина , а точка – це точка перетину осі з площиною).

Рис. 22
2.
Вектор сили
спроектувати на задану площину. Як
відомо (див. додаток 1), проекція сили на
площину – це вектор. В даному випадку
(рис. 22, б) – це вектор
![]() .
.
3.
Отриману проекцію
![]() помножити на найкоротшу відстань від
точки перетину осі з площиною до лінії
дії цієї проекції і вибрати відповідний
знак
помножити на найкоротшу відстань від
точки перетину осі з площиною до лінії
дії цієї проекції і вибрати відповідний
знак
![]() .
(1.16)
.
(1.16)
Знак вибирається згідно з означенням алгебраїчного моменту сили або з таких міркувань: якщо, дивлячись з кінця осі, спостерігач бачить намагання сили повернути площину проти руху годинникової стрілки, то береться знак “+”; в протилежному випадку – знак “–“. В нашому випадку (рис. 22) треба брати знак “+”.
З формули (1.16) випливає, що момент сили відносно осі дорівнює нулеві в двох випадках:
 ,
а це буде тоді, коли сила паралельна до
осі (рис. 23, а);
,
а це буде тоді, коли сила паралельна до
осі (рис. 23, а);– лінія дії сили проходить через вісь (рис. 23, б).
Треба
також відзначити, що момент сили відносно
осі – це скалярна величина, яка графічно
зображується у вигляді відрізка,
котрий відкладається вздовж осі. Якщо
![]() ,
то
цей
відрізок відкладається в додатному
напрямі осі (рис. 23, в),
при
,
то
цей
відрізок відкладається в додатному
напрямі осі (рис. 23, в),
при
![]() – у від’ємному її напрямі (рис. 23, г).
– у від’ємному її напрямі (рис. 23, г).

Рис. 23
Оскільки(
див. рис. 22, в)
![]() є основою трикутника
є основою трикутника
![]() ,
а
– його висота, то
,
а
– його висота, то
![]() і отримуємо
і отримуємо
![]() ,
(1.17)
,
(1.17)
момент сили відносно осі чисельно дорівнює подвійній площі трикутника, вершинами якого є початок і кінець вектора проекції сили на площину, перпендикулярну до осі, і точка перетину осі з пло-щиною (рис. 22, в).
§ 12 Залежність між моментом сили відносно точки і моментом сили відносно осі, яка проходить через цю точку
Для
встановлення залежності між моментом
сили відносно точки й моментом сили
відносно осі, котра проходить через
задану точку, розглянемо довільну силу
,
яка прикладена в точці
.
Візьмемо будь-яку точку
,
через яку проведемо вісь
![]() (рис. 24, а). Визначимо момент сили
відносно точки
.
Як було встановлено, моментом сили
відносно точки є вектор
(рис. 24, а). Визначимо момент сили
відносно точки
.
Як було встановлено, моментом сили
відносно точки є вектор
![]() ,
перпендикулярний до площини
,
перпендикулярний до площини
![]() .
Величина цього вектора за формулою
(1.14) дорівнює
.
Величина цього вектора за формулою
(1.14) дорівнює
![]() .
(а)
.
(а)
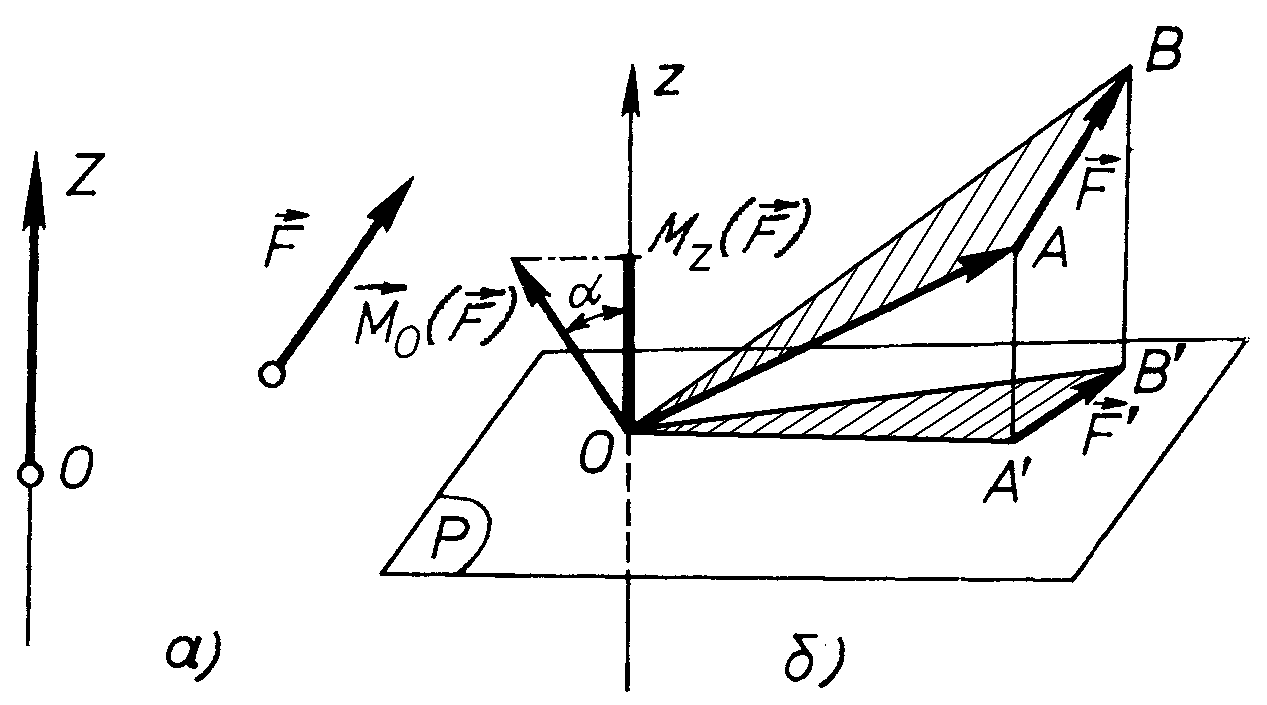
Рис. 24
Вказуємо цей вектор на рисунку (див. рис. 24, б). Тепер визначимо момент сили відносно осі. Для цього силу спроектуємо на площину , яка проходить через точку перпендикулярно до осі . Отримаємо вектор . Як було встановлено, момент сили відносно осі – це скалярна величина, яка чисельно визначається за формулою (див. 1.17)
. (б)
З
рисунка 24, б видно, що трикутник
![]() є проекцією трикутника
на площину
.
З математики відомо, що площа проекції
плоскої фігури на площину
є проекцією трикутника
на площину
.
З математики відомо, що площа проекції
плоскої фігури на площину
![]() дорівнює площі фігури
дорівнює площі фігури
![]() ,
помноженій на косинус кута між площинами
фігури і проекції, тобто
,
помноженій на косинус кута між площинами
фігури і проекції, тобто
![]() .
(в)
.
(в)
Застосувавши рівність (в) до трикутників і і помноживши обидві її частини на 2, дістанемо
![]() ,
,
або
![]() .
(г)
.
(г)
В отриманій залежності – це кут між площинами трикутників і . Але кут між двома площинами дорівнює гострому куту між перпендикулярами до цих площин.
Якщо ввести кут між векторним моментом і додатним напрямом осі , то з врахуванням формули (г) можна записати
![]()
 .
(1.18)
.
(1.18)
Рівність (1.18) дає залежність між моментом сили відносно точки і моментом сили відносно осі, котра проходить через задану точку, згідно з якою маємо:
момент сили відносно осі дорівнює проекції вектора моменту сили відносно точки, що знаходиться на осі, на задану вісь.
Отже, ми отримали ще один спосіб визначення моменту сили відносно осі. Згідно з цим способом, необхідно визначити вектор моменту сили відносно будь-якої точки даної осі і отриманий вектор спроектувати на цю вісь. Даний спосіб в практиці майже не використовується, бо момент сили відносно осі найлегше визначити за формулою (1.16). Зате в теоретичному курсі він часто використовується.