

1 Проекція вектора на площину
Проекцією
вектора
на площину є вектор
![]() ,
який обмежений проекціями початку і
кінця вектора
на задану площину
(рис.1).
,
який обмежений проекціями початку і
кінця вектора
на задану площину
(рис.1).
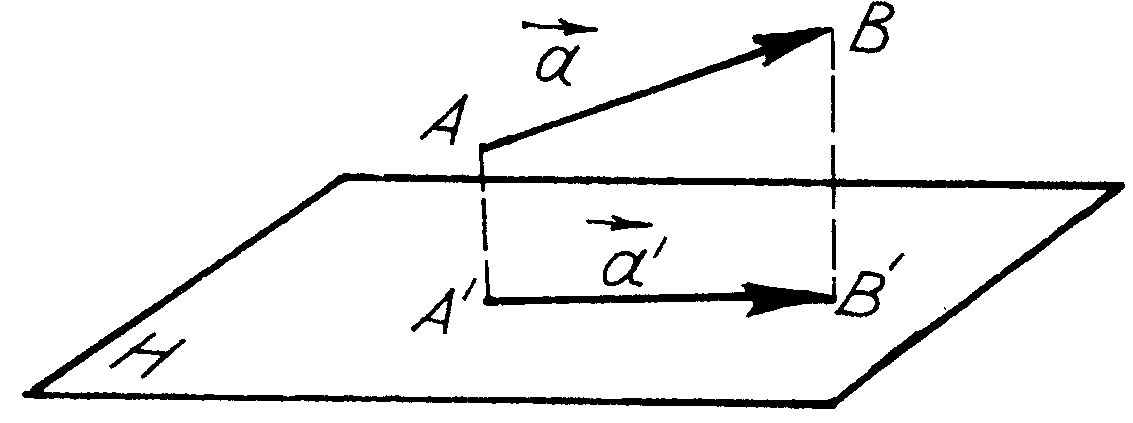
Рис. 1
Отже,
щоб знайти проекцію деякого вектора
на якусь площину, наприклад, площину
(див. рис. 1), необхідно з точки
і
,
які визначають початок і кінець вектора
,
опустити перпендикуляри
![]() і
і
![]() на
задану площину. Основи цих перпендикулярів
на
задану площину. Основи цих перпендикулярів
![]() і
і
![]() визначають проекції точок
і
на площину
.
визначають проекції точок
і
на площину
.
2 Проекція вектора на вісь
Проекцією вектора на вісь є скалярна алгебраїчна величина, яка дорівнює взятій з відповідним знаком довжині відрізка, обмеженого проекціями початку і кінця вектора на задану вісь (рис.2).
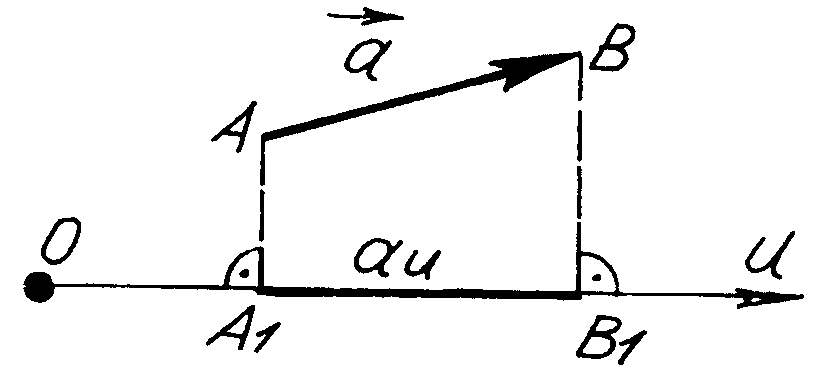
Рис. 2
Отже,
щоб знайти проекцію деякого вектора
на якусь вісь, наприклад, вісь
![]() (див.
рис. 2), необхідно з точок
і
,
які визначають
початок
і кінець вектора
,
опустити перпендикуляри
(див.
рис. 2), необхідно з точок
і
,
які визначають
початок
і кінець вектора
,
опустити перпендикуляри
![]() і
і
![]() на задану вісь. Основи цих перпендикулярів
(точки
на задану вісь. Основи цих перпендикулярів
(точки
![]() і
і
![]() )
визначають проекції точок
і
на вісь
,
а
відрізок
– проекцію вектора
на вісь
.
)
визначають проекції точок
і
на вісь
,
а
відрізок
– проекцію вектора
на вісь
.
Проекція
вектора на вісь найчастіше позначається
тією ж літерою, що і вектор, з індексом
осі на яку він проектується. В даному
випадку
![]() .
Проекції вектора
на
декартові осі координат позначаються
так:
.
Проекції вектора
на
декартові осі координат позначаються
так:
![]() .
.
Проекція
вектора на вісь вважається додатною,
якщо напрям відрізка, що визначає цю
проекцію, збігається з напрямом осі (![]() , див. рис. 2) і від’ємною – в протилежному
випадку(
, див. рис. 2) і від’ємною – в протилежному
випадку(![]() , див. рис. 3,а).
, див. рис. 3,а).
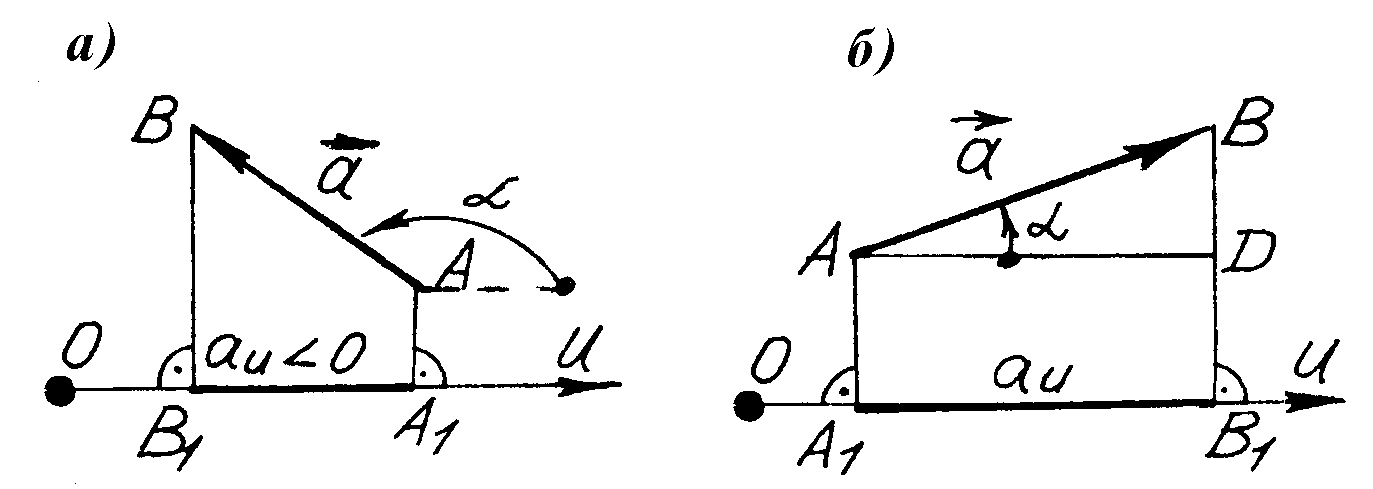
Рис. 3
Якщо
позначити
кут між вектором
![]() і додатним напрямом осі, то (див. рис.
3.б), отримаємо
і додатним напрямом осі, то (див. рис.
3.б), отримаємо
![]() ,
(Д.1)
,
(Д.1)
тобто,
проекція вектора на вісь дорівнює добутку модуля вектора на косинус кута між додатним напрямом осі і вектором, який проектується.
З формули (Д.1) випливає, що:
![]() ,
якщо
,
якщо
![]() ;
;
![]() ,
якщо
,
якщо
![]() або
або
![]() ;
;
![]() ,
якщо
,
якщо
![]() (рис. 3).
(рис. 3).
Зауваження.
Якщо вектор
і
вісь
не лежать в одній площині (рис. 4), то для
знаходження проекції цього вектора на
вісь часто користуються подвійним
проектуванням. Через вісь
проводять довільну площину
![]() ,
на яку проектують вектор
.
Величина цієї проекції
,
на яку проектують вектор
.
Величина цієї проекції
![]() ,
де
– кут між вектором
і площиною
.
,
де
– кут між вектором
і площиною
.

Рис. 4
Отриману
проекцію
проектують на дану вісь
:
![]() .
Тут
– кут між вектором
і додатним напрямом осі
.
.
Тут
– кут між вектором
і додатним напрямом осі
.
3 Приклади розв’язування задач на рівновагу тіла
Задача
3.1.
Вуличний ліхтар вагою
![]() Н
підвішено до вертикальної стіни за
допомогою кронштейна, як вказано на
рис. 5. Визначити зусилля, які виникають
в стержнях крон-штейна, вважаючи їх
невагомими. Кріплення в точках
,
і
– шарнірні.
Н
підвішено до вертикальної стіни за
допомогою кронштейна, як вказано на
рис. 5. Визначити зусилля, які виникають
в стержнях крон-штейна, вважаючи їх
невагомими. Кріплення в точках
,
і
– шарнірні.
Розв’язання.
Розглянемо
рівновагу вузла
.
На нього діє одна задана сила – це сила
ваги ліхтаря (рис. 6). На вузол накладено
дві в’язі: невагомі стрижні
![]() і
і
![]() з шарнірами на кінцях. Їх реакції, як
відомо (див. § 5), напрямлені вздовж цих
стрижнів. Як видно з рисунка, стрижень
працює на розтяг, тому його реакція
з шарнірами на кінцях. Їх реакції, як
відомо (див. § 5), напрямлені вздовж цих
стрижнів. Як видно з рисунка, стрижень
працює на розтяг, тому його реакція
![]() напрямлена від вузла
.
Стрижень
працює на стиск, і його реакція
напрямлена від вузла
.
Стрижень
працює на стиск, і його реакція
![]() напрямлена до вузла. Отже, сили, що діють
на вузол
,
утворюють плоску систему збіжних сил
і до неї можна застосувати як геометричну,
так і аналітичну умови рівноваги (див.
§ 8).
напрямлена до вузла. Отже, сили, що діють
на вузол
,
утворюють плоску систему збіжних сил
і до неї можна застосувати як геометричну,
так і аналітичну умови рівноваги (див.
§ 8).
Рис. 5 |
Рис. 6 |


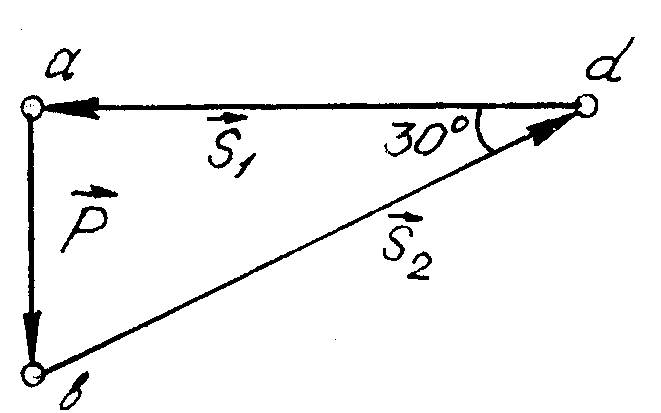
Геометрична
система рівноваги – це замкнутий силовий
багатокутник. Для побудови його з точки
,
що береться поза основним рисунком, в
певному масштабі відкладаємо відому
силу
(![]() ,
рис. 7). З початку і кінця сили
проводимо промені, які паралельні
стрижням (наприклад,
,
рис. 7). З початку і кінця сили
проводимо промені, які паралельні
стрижням (наприклад,
![]() ,
,
![]() ).
Точку перетину цих променів позначимо
буквою
.
Оскільки одержаний силовий трикутник
повинен бути замкнутим, то вектори
).
Точку перетину цих променів позначимо
буквою
.
Оскільки одержаний силовий трикутник
повинен бути замкнутим, то вектори
![]() і
і
![]() визначають реакції відповідних стрижнів
на шарнір
.
Зазначимо, що силовий трикутник можна
було б побудувати так, як вказано на
рис. 8. Оскільки побудову виконано в
певному масштабі, то, замірявши сторони
трикутника, знаходимо величини відповідних
реакцій. Згідно з рис. 7 маємо
визначають реакції відповідних стрижнів
на шарнір
.
Зазначимо, що силовий трикутник можна
було б побудувати так, як вказано на
рис. 8. Оскільки побудову виконано в
певному масштабі, то, замірявши сторони
трикутника, знаходимо величини відповідних
реакцій. Згідно з рис. 7 маємо
![]() ,
,
![]() .
.
Рис. 7 |
Рис. 8 |

Часто,
для одержання більшої точності,
побудований силовий трикутник розв’язують
аналітично. Так, в даному випадку силовий
трикутник є прямокутним, в якому
![]() (рис. 7 і 8), тоді за теоремою синусів маємо
(рис. 7 і 8), тоді за теоремою синусів маємо
![]() ,
,
звідси
![]() ,
,
![]() .
.
Для аналітичного розв’язку задачі необхідно скласти рівняння рівноваги плоскої системи збіжних сил.
В нашому випадку (див. рис. 6, на якому вказано вибрану систему координат) маємо
![]()
![]() ,
,
![]()
![]() .
.
Звідси отримаємо
![]() ,
,
![]() ,
,
що узгоджується з попереднім.
Задача
3.2.
Вантаж
вагою
![]() висить на тросі, який перекинуто
через блок
і напрямлено до коловорота
висить на тросі, який перекинуто
через блок
і напрямлено до коловорота
![]() (рис. 9). Нехтуючи тертям на блоці і вагою
стрижнів, визначити зусилля в стрижнях
,
і
(рис. 9). Нехтуючи тертям на блоці і вагою
стрижнів, визначити зусилля в стрижнях
,
і
![]() ,
які підтримують блок
,
вважаючи їх кріплення шарнірними.
,
які підтримують блок
,
вважаючи їх кріплення шарнірними.
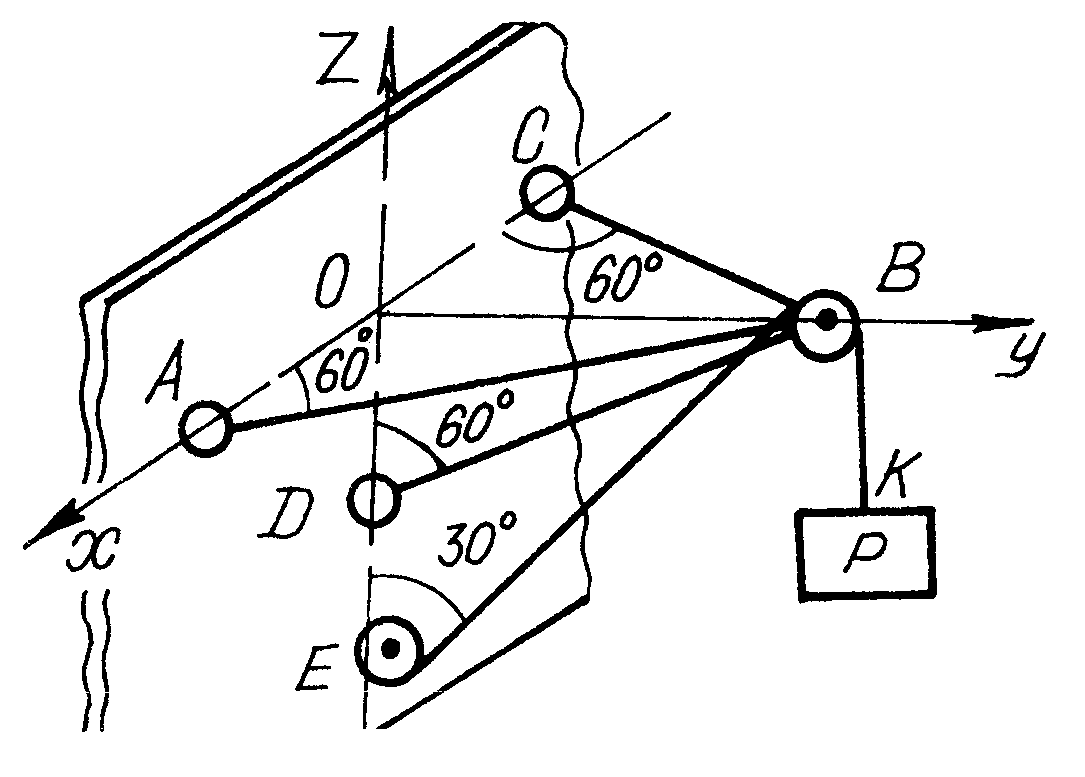
Рис. 9
Розв’язання. Розглянемо рівновагу блока . На нього діють (рис. 10):
![]() –
натяги
частин
–
натяги
частин
![]() і
і
![]() троса, які, очевидно, є рівними між собою
і чисельно дорівнюють вазі вантажу,
тобто
троса, які, очевидно, є рівними між собою
і чисельно дорівнюють вазі вантажу,
тобто
![]() ;
;

Рис. 10
![]() – реакції
невагомих стрижнів з шарнірами на
кінцях. Ці реакції напрямлені вздовж
прямих
,
і
і дорівнюють шуканим зусиллям в стрижнях.
До того ж, вважаючи, що всі стрижні
працюють на розтяг, реакції їх напрямляємо
від вузла
.
– реакції
невагомих стрижнів з шарнірами на
кінцях. Ці реакції напрямлені вздовж
прямих
,
і
і дорівнюють шуканим зусиллям в стрижнях.
До того ж, вважаючи, що всі стрижні
працюють на розтяг, реакції їх напрямляємо
від вузла
.
Отримана система сил є просторовою збіжною. Складаємо її рівняння рівноваги
![]() ;
;
![]()
![]() ;
;
![]()
![]() .
.
Звідси знаходимо
![]()
![]() .
.
Оскільки
![]() ,
то остаточно отримаємо
,
то остаточно отримаємо
![]() ,
,
![]() .
.
Знак
мінус біля значення
![]() вказує на те, що відповідний стрижень,
в даному випадку стрижень
,
працює на стиск.
вказує на те, що відповідний стрижень,
в даному випадку стрижень
,
працює на стиск.
Задача
3.3.
Знайти реакції жорсткого защемлення
балки
,
яка завантажена на відрізку
рівномірно розподіленим навантаженням
інтенсивності
![]() Н/м,
в точці
зосередженою силою
Н/м,
в точці
зосередженою силою
![]() кН
під кутом
кН
під кутом
![]() до балки і парою сил з моментом
до балки і парою сил з моментом
![]() кНм.
Розміри вказані на рис. 11.
кНм.
Розміри вказані на рис. 11.
Розв’язання.
За об’єкт
рівноваги вибираємо балку
.
Активними силами, прикладеними до балки,
будуть: сила
;
пара сил з моментом
;
рівномірно розподілене навантаження
![]() ,
рівнодійна якого дорівнює
,
рівнодійна якого дорівнює
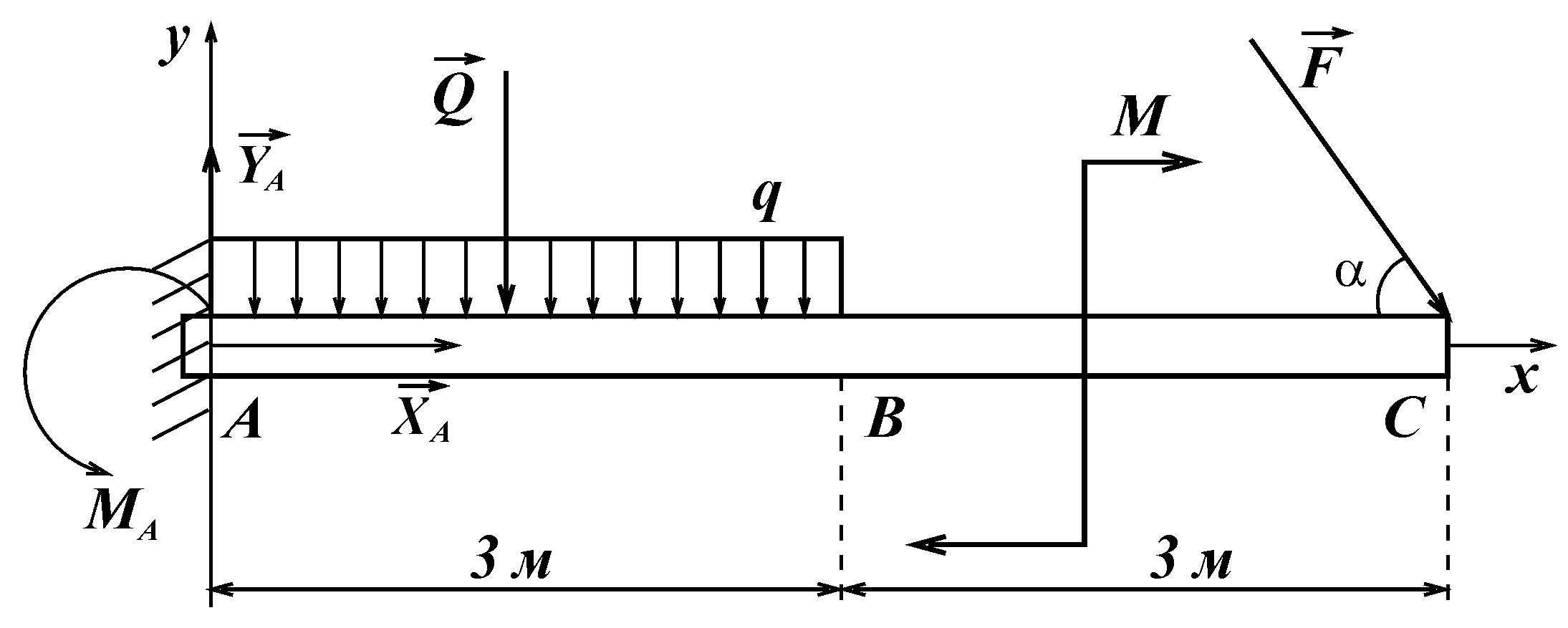
Рис. 11
![]() .
.
В’яззю,
накладеною на балку, є жорстке защемлення
.
Заміняємо дію цієї в’язі
реакціями
![]() і реактивним моментом
і реактивним моментом
![]() .
.
На балку діє плоска довільна система сил. Рівняння рівноваги
![]() ;
;
![]() ;
;
![]() .
.
Розв’язуючи цю систему рівнянь, отримаємо
![]() кН
,
кН
,
![]() кН
,
кН
,
![]() кНм
.
кНм
.
Задача
3.4.
Плита
вагою
утримується в горизонтальному положенні
за допомогою сферичного шарніра
,
завіси
і невагомого стрижня
![]() ,
розміщеного в площині, паралельній
координатній площині
,
розміщеного в площині, паралельній
координатній площині
![]() (рис. 12). У площині плити діє пара сил з
моментом
.
Визначити реакції опор і зусилля в
стрижні
,
якщо
(рис. 12). У площині плити діє пара сил з
моментом
.
Визначити реакції опор і зусилля в
стрижні
,
якщо
![]() кН,
кН,
![]() кН,
кН,
![]() м,
м,
![]() м,
м,
![]() .
.
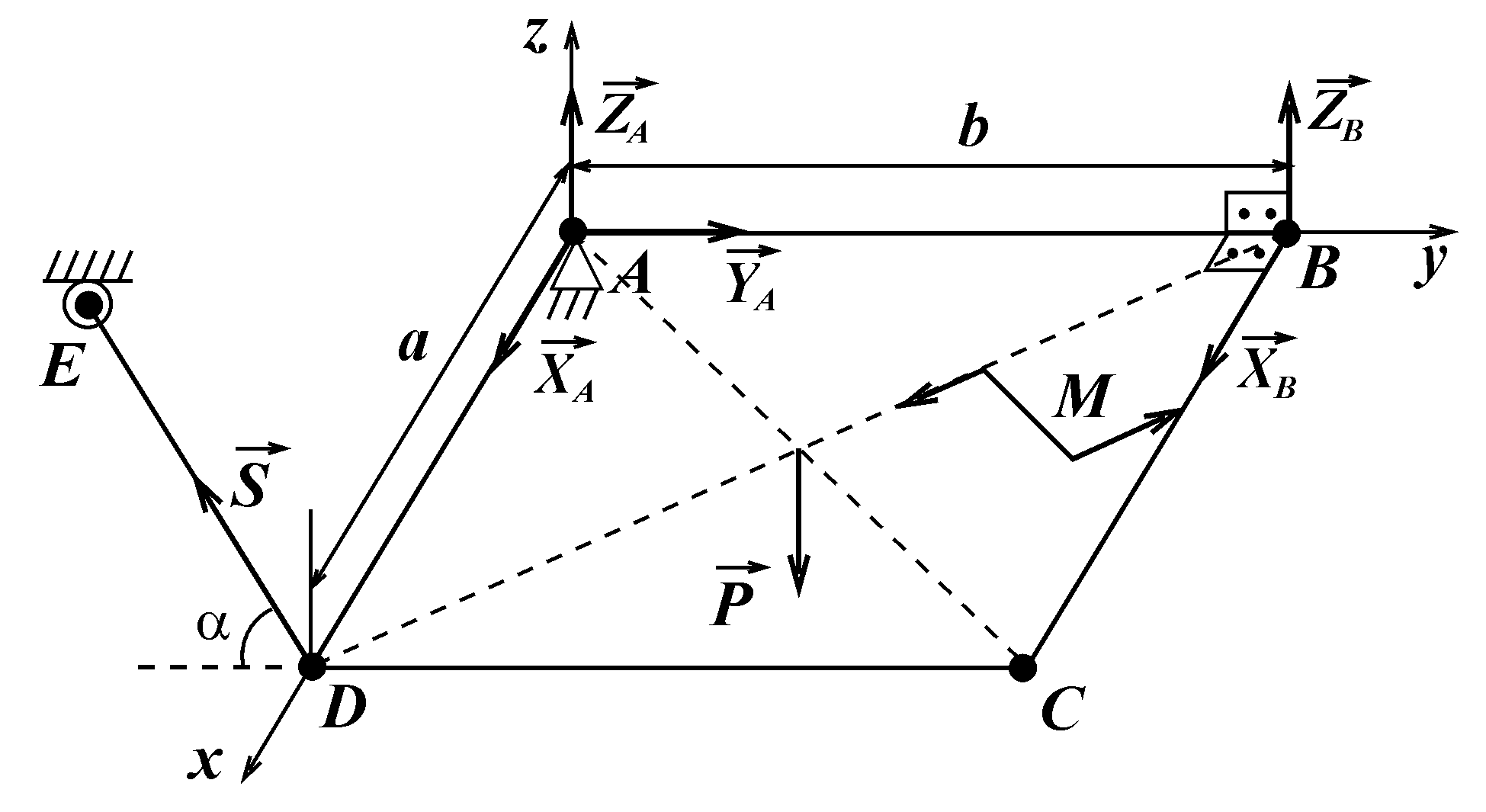
Рис. 12
Розв’язання.
Об’єкт рівноваги – плита. Активна сила
![]() ,
пара сил з моментом
,
реакції в’язей
,
пара сил з моментом
,
реакції в’язей
![]() показані на рис. 12. На плиту діє довільна
просторова система сил, для якої запишемо
рівняння рівноваги
показані на рис. 12. На плиту діє довільна
просторова система сил, для якої запишемо
рівняння рівноваги
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
Розв’язуючи отриману систему рівнянь знаходимо невідомі реакції
![]()
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.