

§ 46.8 Миттєвий центр пришвидшень
Миттєвим центром пришвидшень називається точка під час плоского руху тіла, пришвидшення якої в даний момент часу дорівнює нулеві.
Миттєвий
центр пришвидшень найчастіше позначається
буквою
,
отже
![]() .
.
П
Рис. 127
Для цього розглянемо плоску фігуру, котра рухається в площині рисунка (рис. 127). За полюс плоскої фігури візьмемо точку О. Нехай в деякий момент часу полюс має пришвидшення , а плоска фігура обертається навколо полюса з кутовим пришвидшенням , маючи в даний момент часу кутову швидкість , як вказано на рис. 127. З точки під кутом до вектора проведемо промінь ОЕ, причому кут вибираємо таким, що
![]() .
(а)
.
(а)
Кут відкладається від вектора в бік дугової стрілки кутового пришвидшення .
На цьому промені візьмемо точку В на відстані
![]() (б)
(б)
і визначимо її пришвидшення. За формулою (2.71) маємо
![]() . (в)
. (в)
Величина вектора пришвидшення точки В в обертанні навколо полюса О визначається формулою (2.73) і в нашому випадку, враховуючи (б), отримаємо
![]() .
(г)
.
(г)
Цей вектор, як доведено вище, утворює з відрізком ОВ кут , який задовольняє умову (див. формулу 2.74)
![]() ,
,
тобто
![]() ,
а це означає (див. рис. 127), що вектори
і
,
а це означає (див. рис. 127), що вектори
і
![]() напрямлені протилежно, і векторна сума
(в) перетворюється в просту алгебраїчну
різницю
напрямлені протилежно, і векторна сума
(в) перетворюється в просту алгебраїчну
різницю
![]() ,
,
Отже,
пришвидшення точки В
дорівнює нулеві, тобто точка В
є миттєвим центром пришвидшень (![]() )
плоскої фігури.
)
плоскої фігури.
З доведення випливає:
1. Миттєвий центр пришвидшень знаходиться на промені, який утворює з вектором пришвидшення полюса кут , тангенс якого визначається за формулою
. (2.75)
Цей
кут необхідно відкладати від вектора
![]() в
бік
.
в
бік
.
Напрям дугової стрілки визначається знаком алгебраїчного кутового пришвидшення .
2. Відстань до миттєвого центра пришвидшень визначається за формулою
![]() ,
(2.76)
,
(2.76)
в якій – прискорення полюса.
Формули (2.75) і (2.76) є загальними формулами, за допомогою яких визначається положення миттєвого центра пришвидшень.
Розглянемо часткові випадки.
1.
Плоска фігура навколо полюса обертається
з постійною кутовою швидкістю, тобто
![]() .
Тоді кутове пришвидшення плоскої фігури
.
Тоді кутове пришвидшення плоскої фігури
![]() .
Отже
.
Отже
![]() ,
,
а
Рис. 128
2.
Нехай кутова швидкість плоскої фігури
![]() ,
а її кутове пришвидшення
,
а її кутове пришвидшення
![]() ,
тобто плоска фігура здійснює миттєвий
поступальний рух, тоді
,
тобто плоска фігура здійснює миттєвий
поступальний рух, тоді
![]() .
.
В
Рис.
129
Якщо
відомі вектори пришвидшень двох точок
плоскої фігури, то миттєвий центр
пришвидшень знаходиться графічно. Нехай
відомі пришвидшення
![]() і
і
![]() точок А
і В
плоскої фігури (рис. 130).
точок А
і В
плоскої фігури (рис. 130).

Рис. 130
Згідно з формулою (2.71)
![]() .
.
Будуємо
в точці В
паралелограм прискорень за заданою
діагоналлю
і однією стороною
.
За знайденим графічно при-швидшенням
![]() визначаємо напрям
і кут
визначаємо напрям
і кут
![]() ,
який цей вектор утворює з відрізком АВ.
Маючи кут
і напрям
,
відкладаємо цей кут від пришвидшень
точок А і В по напряму
.
Отримані два промені продовжуємо до
перетину в точці
,
яка буде миттєвим центром пришвидшень.
,
який цей вектор утворює з відрізком АВ.
Маючи кут
і напрям
,
відкладаємо цей кут від пришвидшень
точок А і В по напряму
.
Отримані два промені продовжуємо до
перетину в точці
,
яка буде миттєвим центром пришвидшень.
На рисунку 131 побудовані миттєві центри пришвидшень у випадку, коли і паралельні.
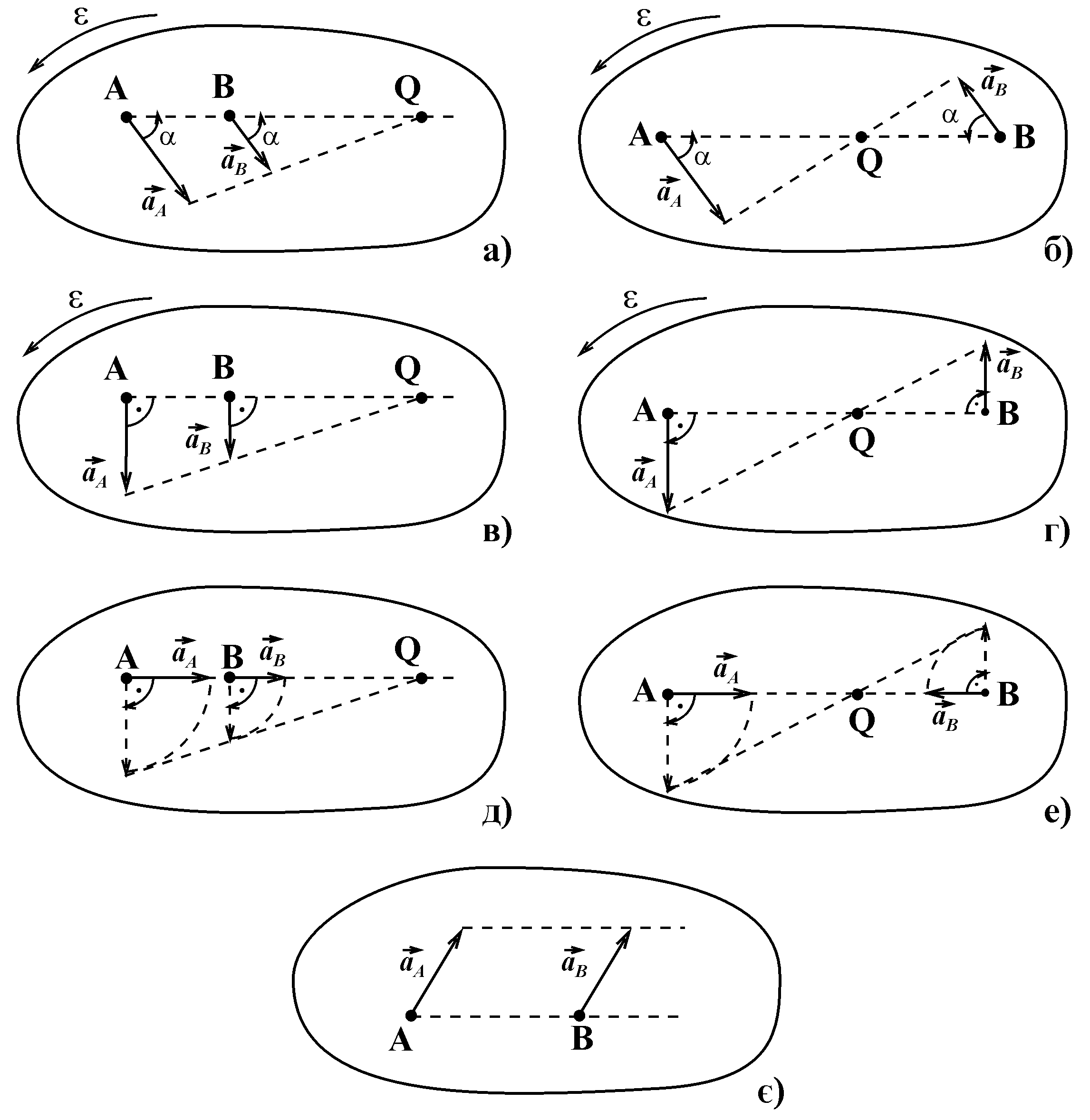
Рис. 131
1.
Випадки а) і б) відповідають
![]() ,
тобто
,
тобто
![]() ;
.
;
.
2.
Випадки в) і г) відповідають
![]() ,
тобто
;
.
,
тобто
;
.
3.
Випадки д) і е) відповідають
![]() ,
тобто
;
.
,
тобто
;
.
4. У випадку є) і миттєвий центр пришвидшень знаходиться в нескінченності, а пришвидшення всіх точок плоскої фігури геометрично рівні.
Якщо відомий миттєвий центр пришвидшень, то знаходження пришвидшень точок плоскої фігури суттєво спрощується. Дійсно, прийнявши миттєвий центр пришвидшень за полюс (рис. 132), отримаємо
![]() .
.
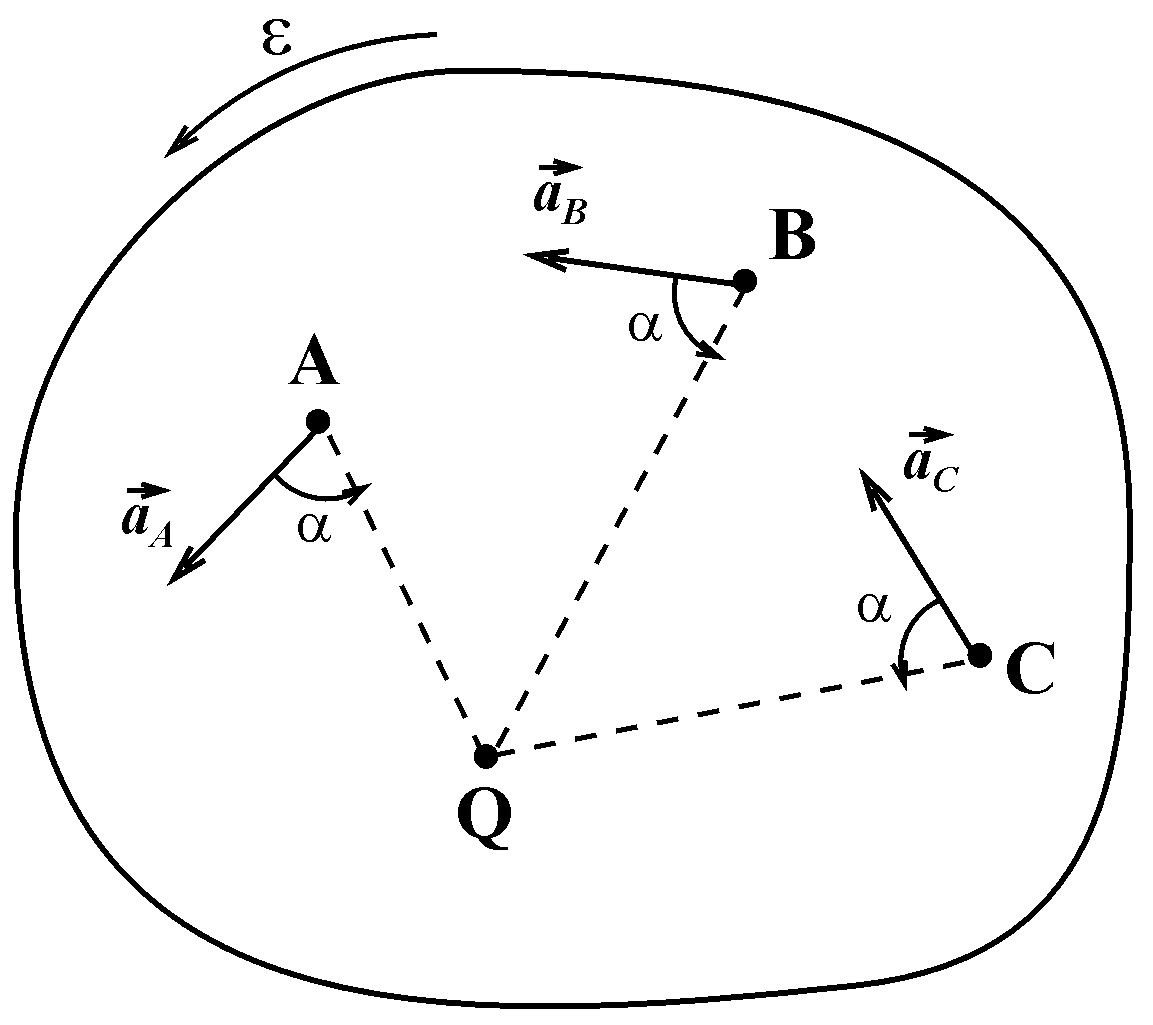
Рис. 132
Оскільки
,
то
![]() .
Аналогічно
.
Аналогічно
![]() ,
,
![]() .
Із цих співвідношень згідно з (2.73)
отримаємо
.
Із цих співвідношень згідно з (2.73)
отримаємо
![]() ;
;
![]() ;
(2.76 а)
;
(2.76 а)
![]() .
.
Отже, якщо відомий миттєвий центр пришвидшень, то пришвидшення точки плоскої фігури в кожний момент часу обчислюється за формулою (2.76 а).
Пришвидшення
точок плоскої фігури пропорційні
відстані від точок до миттєвого центра
пришвид-шень, а вектори пришвидшень
утворюють з відрізками, які з’єднують
ці точки з миттєвим центром пришвидшень
один і той же кут
![]() .
.
Зауваження. Миттєвий центр швидкостей Р і миттєвий центр пришвидшень Q є різні точки плоскої фігури.