

§ 23 Аналітичні умови рівноваги просторової системи сил
Вище (див. § 21) було встановлено, що необхідною і достатньою умовою зрівноваження довільної системи сил є рівність нулеві її головного вектора і головного моменту (див. рівності 1.44)
![]() (а)
(а)
Враховуючи,
що
![]() ,
рівності (а) можна записати у вигляді
,
рівності (а) можна записати у вигляді
![]() б)
б)
Проектуючи векторні рівності (б) на декартові осі координат, з врахуванням залежності (1.18) отримуємо аналітичні умови рівноваги довільної системи сил
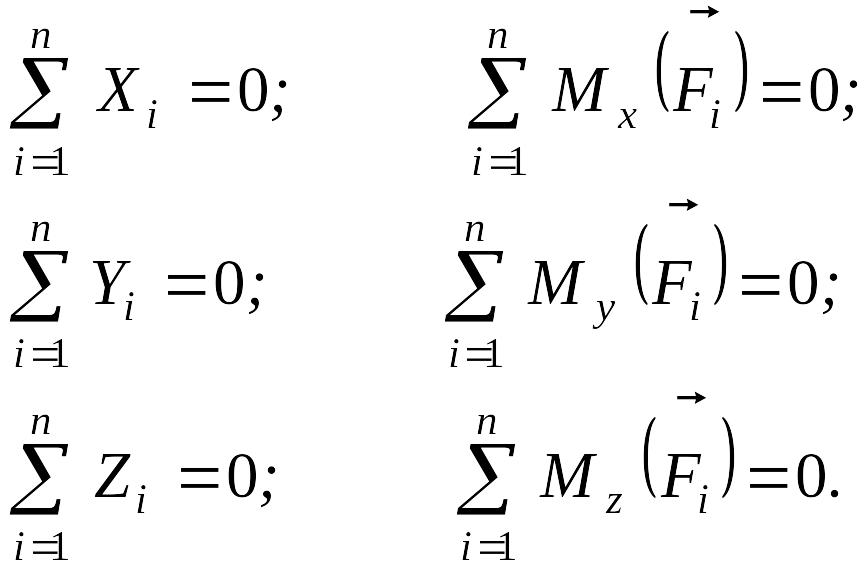 (1.49)
(1.49)
Отже,
для рівноваги довільної просторової системи сил необхідно і достатньо, щоб сума проекцій всіх сил системи на три координатні осі та суми моментів всіх сил системи відносно цих координатних осей дорівнювали нулеві.
Таким чином, при розв’язуванні задач на рівновагу довільної просторової системи сил, яка прикладена до твердого тіла, необхідно скласти шість рівнянь рівноваги вигляду (1.49) і маємо можливість за їх допомогою визначити шість невідомих величин.
Розглянемо
частковий випадок – просторову систему
паралельних сил. Систему координат
виберемо так, щоб вісь
була паралельна лініям дій сил (рис.
50). Система сил буде знаходитись в
рівновазі, коли будуть виконуватись
умови (1.49), бо це умова рівноваги довільної,
тобто будь-якої системи сил. Оскільки
розглянута система сил є спрощеним
варіантом довільної системи, то і система
умов (1.49) повинна спроститись. Спрощення
системи (1.49) проведемо шляхом виключення
рівностей, які виконуються тотожно,
тобто
фактично є зайвими. Такими
рівностями, очевидно, є:
![]()
![]() і ми отримуємо систему
і ми отримуємо систему
![]() (1.50)
(1.50)
які є аналітичними умовами рівноваги просторової системи паралельних сил.
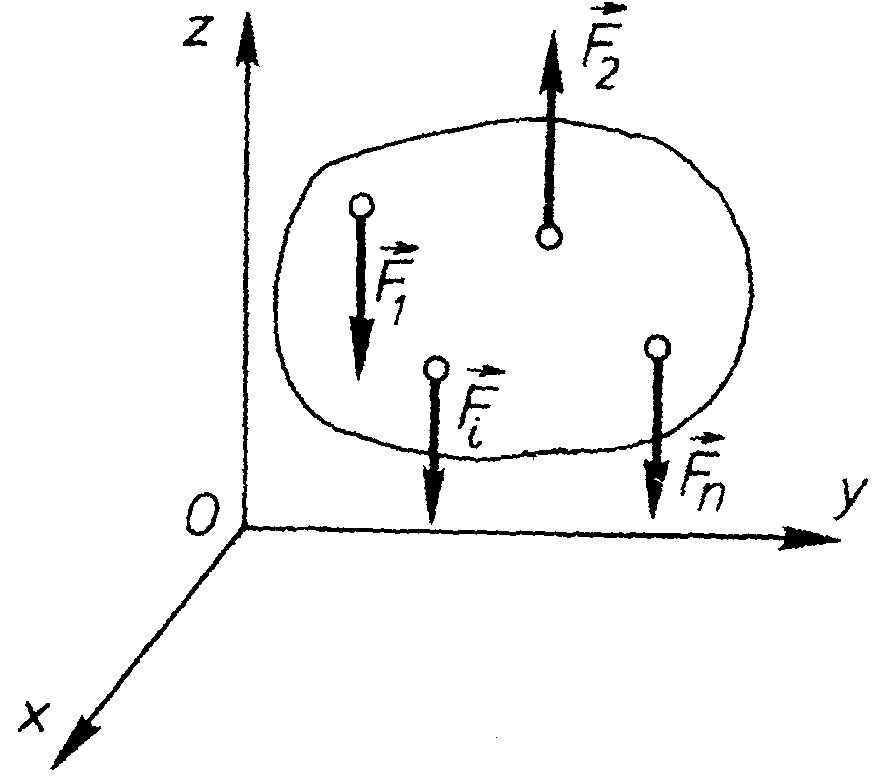
Рис. 50
§ 24 Аналітичні умови рівноваги плоскої системи сил
Розглянемо
систему сил, яка розміщена в одній
площині (рис. 51). Нехай такою площиною
буде площина
![]() ,
тобто
,
тобто
![]() .
Розглянута система сил буде зрівноваженою,
коли будуть виконуватись умови (1.49), бо,
як і було сказано вище, це умови рівноваги
будь-якої системи сил. Але розглянута
система сил є спрощеним варіантом
довільної, отже і система умов (1.49)
повинна спроститись. Спрощення проведемо,
як і в попередньому випадку, шляхом
виключення рівностей, які виконуються
тотожно. Такими рівностями є
.
Розглянута система сил буде зрівноваженою,
коли будуть виконуватись умови (1.49), бо,
як і було сказано вище, це умови рівноваги
будь-якої системи сил. Але розглянута
система сил є спрощеним варіантом
довільної, отже і система умов (1.49)
повинна спроститись. Спрощення проведемо,
як і в попередньому випадку, шляхом
виключення рівностей, які виконуються
тотожно. Такими рівностями є
![]()
До того ж для даної системи сил, враховуючи, що сили знаходяться в площині, яка перпендикулярна до осі , маємо
![]() ,
,
і умови (1.49) для плоскої системи сил набувають вигляду
![]()
![]()
![]() (1.51)
(1.51)
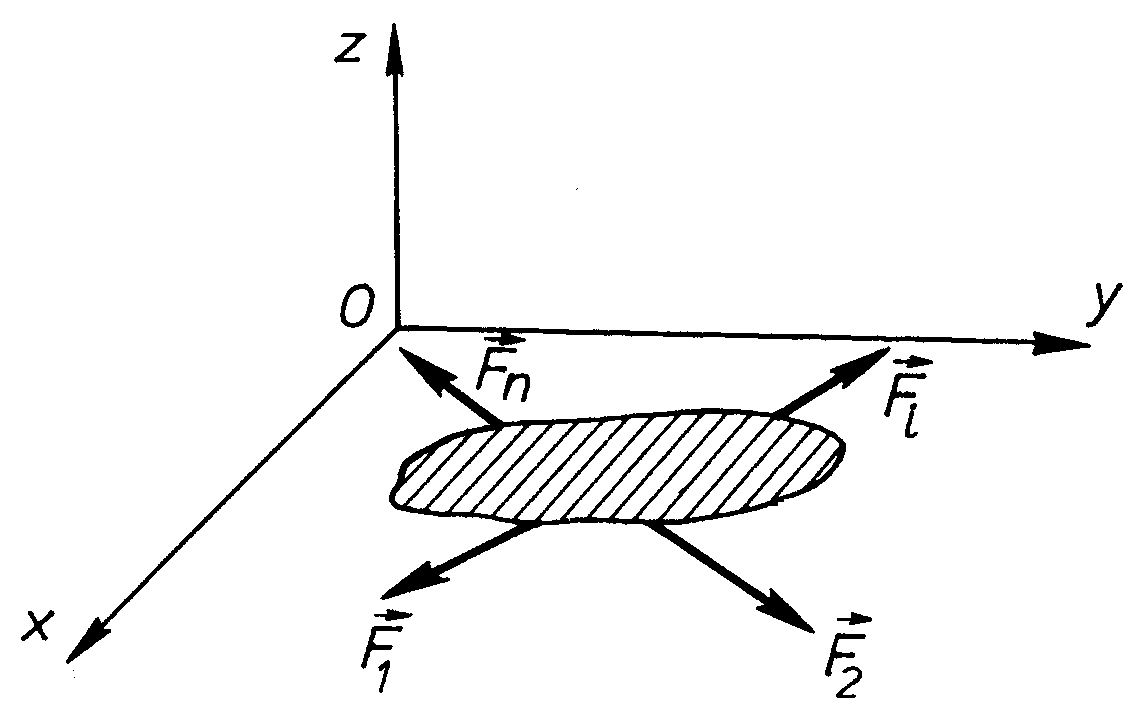
Рис. 51
Для рівноваги довільної плоскої системи сил необхідно і достатньо, щоб суми проекцій всіх сил системи на дві координатні осі та суми їх моментів відносно довільної точки, яка знаходиться в площи-ні дії сил, дорівнювали нулеві.
Таким чином, для плоскої системи сил маємо три аналітичні умови, але їх можна записати в трьох формах. Якщо вва-жати (1.51) умовами рівноваги плоскої системи сил в першій формі, то другою формою її умов рівноваги є
![]() (1.52)
(1.52)
Для рівноваги довільної плоскої системи сил необхідно і достатньо, щоб суми алгебраїчних моментів всіх сил системи відносно двох довільних точок А і В, що знаходяться в площині дії сил, і сума проекцій сил на будь-яку вісь Оx, що лежить в цій площині і не перпендикулярна до прямої, яка з’єднує точки А і В, дорівнювали нулеві.
Третя форма
![]() (1.53)
(1.53)
Для рівноваги довільної плоскої системи сил необхідно і достатньо, щоб суми алгебраїчних моментів всіх сил системи відносно трьох довільних точок А, В і С, які знаходяться в площині дії сил і не лежать на одній прямій, дорівнювали нулеві.
При рівновазі плоскої системи сил необхідність виконання умов (1.52) і (1.53) випливає з умов рівноваги (1.51). Доведено достатність цих умов.
В
тому, що умови (1.52) і (1.53) є аналітичними
умовами рівноваги плоскої системи сил,
можна легко переконатися, якщо визначити
головний вектор і головний момент
плоскої системи сил, котра задовольняє
дані умови. Для цього спочатку розглянемо
плоску систему сил
![]() ,
яка задовольняє умови (1.52) і зведемо
дану систему до довільної точки Е
(рис. 52). Згідно із загальною теорією
зведення системи сил до заданого центра
в точці Е
отримаємо силу
,
геометрично рівну головному вектору
системи
,
яка задовольняє умови (1.52) і зведемо
дану систему до довільної точки Е
(рис. 52). Згідно із загальною теорією
зведення системи сил до заданого центра
в точці Е
отримаємо силу
,
геометрично рівну головному вектору
системи
![]() ,
і пару сил з моментом М,
котрий дорівнює головному моменту
системи відносно точки зведення
,
і пару сил з моментом М,
котрий дорівнює головному моменту
системи відносно точки зведення
![]() .
Оскільки задана система задовольняє
умові
.
Оскільки задана система задовольняє
умові
![]() ,
то її головний вектор, отже і отримана
сила, будуть перпендикулярними до осі
,
то її головний вектор, отже і отримана
сила, будуть перпендикулярними до осі
![]() (рис. 52). На площині дії сили вибираємо
дві довільні точки А
і В
і складемо суми моментів сил отриманої
системи відносно даних точок (див. рис.
52)
(рис. 52). На площині дії сили вибираємо
дві довільні точки А
і В
і складемо суми моментів сил отриманої
системи відносно даних точок (див. рис.
52)
![]()
Оскільки
![]() і відповідно до умов (1.52)
і відповідно до умов (1.52)
![]() ;
;
![]() ,
то отримаємо
,
то отримаємо

Рис. 52
![]()
Звідки
![]() тобто розглянута система сил задовольняє
необхідну і достатню умову рівноваги.
тобто розглянута система сил задовольняє
необхідну і достатню умову рівноваги.
Тепер
розглянемо плоску систему сил, яка
задовольняє умови (1.53).Визначимо її
головний вектор і головний момент. Для
цього систему сил зведемо до центра Е,
в якому отримаємо силу
і пару сил з моментом М,
причому
![]()
![]() (рис. 53). В площині дії сил вибираємо три
довільні точки А,
В,
С
і складаємо суми моментів відносно цих
точок. Ці суми згідно з рівняннями (1.53)
повинні дорівнювати
нулеві.
(рис. 53). В площині дії сил вибираємо три
довільні точки А,
В,
С
і складаємо суми моментів відносно цих
точок. Ці суми згідно з рівняннями (1.53)
повинні дорівнювати
нулеві.
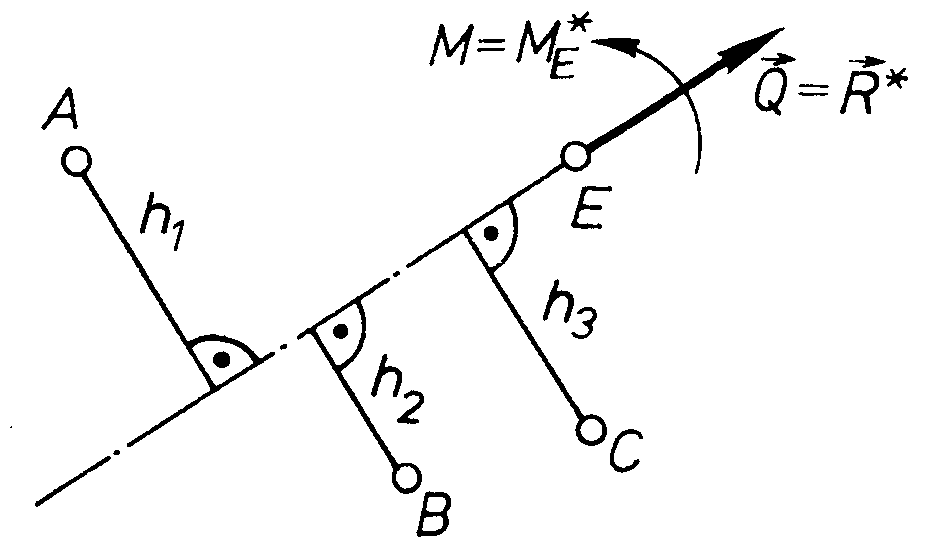
Рис. 53
![]()
![]()
![]()
Оскільки
в отриманих рівняннях хоча б одне
![]() (інакше точки А,
В
і С
будуть знаходитись на одній лінії, що
забороняється умовами (1.53)), то отримаємо
(інакше точки А,
В
і С
будуть знаходитись на одній лінії, що
забороняється умовами (1.53)), то отримаємо
![]() а це означає, що головний вектор і
головний момент розглянутої системи
відповідно дорівнюють нулеві
а це означає, що головний вектор і
головний момент розглянутої системи
відповідно дорівнюють нулеві
![]() ,
тобто
вона задовольняє необхідній і достатній
умові рівноваги.
,
тобто
вона задовольняє необхідній і достатній
умові рівноваги.
Тепер
розглянемо частковий випадок плоскої
системи сил – плоску систему паралельних
сил. Систему координат виберемо так,
щоб вісь
![]() була паралельною лініям дій сил (рис.
54). Розглянута система сил буде
зрівноважена, коли будуть виконуватись
умови (1.51) або (1.52), бо вони є умовами
рівноваги будь-якої плоскої системи
сил. В даних системах умов перша умова
виконується тотожно, тобто
була паралельною лініям дій сил (рис.
54). Розглянута система сил буде
зрівноважена, коли будуть виконуватись
умови (1.51) або (1.52), бо вони є умовами
рівноваги будь-якої плоскої системи
сил. В даних системах умов перша умова
виконується тотожно, тобто
![]() її можна виключити і тоді отримаємо з
умов (1.51)
її можна виключити і тоді отримаємо з
умов (1.51)
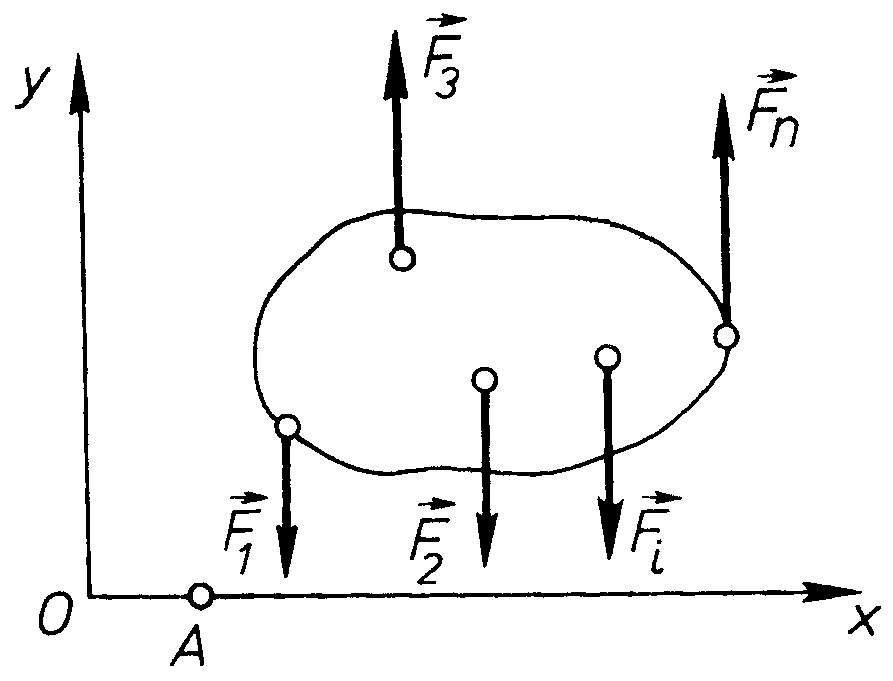
Рис. 54
![]() (1.54)
(1.54)
а з умов (1.52)
![]() (1.55)
(1.55)
Умови (1.54) і (1.55) є аналітичними умовами рівноваги плоскої системи паралельних сил у двох формах:
Перша форма:
для рівноваги плоскої системи сил необхідно і достатньо, щоб сума проекцій всіх сил системи на вісь, яка паралельна силам, і сума алгебраїчних моментів всіх сил системи відносно довільної точки, що лежить в площині дії сил, дорівнювали нулеві.
Друга форма:
для рівноваги плоскої системи паралельних сил необхідно і достатньо, щоб суми алгебраїчних моментів всіх сил системи відносно двох будь-яких точок А і В, що лежать в площині дії сил і не лежать на прямій, яка паралельна лініям дії сил, дорівнювали нулеві.
Отже, для довільної плоскої системи сил маємо три умови рівноваги, які записані в трьох формах (1.51)–(1.53). Для плоскої системи паралельних сил маємо дві умови рівноваги в двох формах (1.54)–(1.55). Треба зауважити:
1. Система (1.51) є основною формою умов рівноваги довільної плоскої системи сил. Для плоскої системи паралельних сил основною формою умов рівноваги є система (1.54). Це, по-перше, пояснюється тим, що дані умови рівноваги не накладають обмежень на вибір системи координат і точки, відносно якої складається сума моментів. По-друге, скласти суму проекцій сил на вісь, в основному, є легше, ніж скласти суму моментів цих сил відносно точки.
2. Якщо при розв’язанні задачі використовується одна форма умови рівноваги, то для отримання додаткової інформації не треба брати умови рівноваги з другої форми. Коротше кажучи, для довільної плоскої системи сил, що діє на якесь тіло, можна скласти тільки три рівняння рівноваги. Додатково складене рівняння рівноваги ніякої нової інформації не дасть, бо після відповідних перетворень воно співпаде з одним із попередніх рівнянь.