

§ 44.4 Коріолісове пришвидшення і його визначення
В попередньому параграфі для пришвидшення Коріоліса отримано вираз
 .
(з)
.
(з)
Для
надання фізичного змісту отриманому
виразу виконаємо деякі перетворення.
З’ясуємо, чому дорівнюють похідні
![]() ,
,
![]() ,
,
![]() .
Оскільки орти
.
Оскільки орти
![]() ,
,
![]() ,
можуть змінюватися лише за напрямом,
то їх зміна відбувається при обертанні
системи координат
,
можуть змінюватися лише за напрямом,
то їх зміна відбувається при обертанні
системи координат
![]() ,
а також і носія
навколо точки О.
Як
буде показано в § 47, носій відносно точки
О
може здійснювати сферичний рух. Це
означає, що в кожний момент часу носій
(рухома система координат
відносно умовно нерухомої точки О,
буде здійснювати обертальний рух навколо
миттєвої осі обертання. Тому згідно з
формулою (2.55)
,
а також і носія
навколо точки О.
Як
буде показано в § 47, носій відносно точки
О
може здійснювати сферичний рух. Це
означає, що в кожний момент часу носій
(рухома система координат
відносно умовно нерухомої точки О,
буде здійснювати обертальний рух навколо
миттєвої осі обертання. Тому згідно з
формулою (2.55)
![]() ;
;
![]() ;
;
![]() ,
(i)
,
(i)
де
– кутова швидкість рухомої системи
координат. Рух рухомої системи координат
був названий переносним рухом. Кінематичні
характеристики його позначаються
індексом “е”, тому в подальшому
будемо позначати
![]() і називати вектором кутової швидкості
переносного обертання.
і називати вектором кутової швидкості
переносного обертання.
Підставляючи (і) в (з) і враховуючи позначення вектора кутової швидкості , отримаємо
![]()
![]() .
.
Оскільки
![]() (див. формули (б)), остаточно отримаємо
(див. формули (б)), остаточно отримаємо
![]() .
(2.60)
.
(2.60)
Вектор пришвидшення Коріоліса геометрично дорівнює подвійному векторному добутку вектора переносної кутової швидкості на вектор відносної лінійної швидкості.
Отримана формула (2.60) дає змогу визначити як величину, так і напрям вектора пришвидшення Коріоліса. Виходячи з властивості векторного добутку, маємо формулу
![]() , (2.61)
, (2.61)
яка визначає модуль коріолісового пришвидшення.
Модуль
пришвидшення Коріоліса дорівнює
подвійному добутку модуля кутової
швидкості переносного руху (
)
на модуль відносної лінійної швидкості
(![]() )
і на синус кута між цими векторами.
)
і на синус кута між цими векторами.
З формули (2.61) випливає, що коріолісове пришвидшен-ня дорівнює нулеві в таких випадках:
1)
коли
![]() ,
тобто у випадку поступального переносного
руху або в момент, коли кутова швидкість
непоступального руху дорівнює нулеві;
,
тобто у випадку поступального переносного
руху або в момент, коли кутова швидкість
непоступального руху дорівнює нулеві;
2 )
коли
)
коли
![]() ,
тобто у момент часу відносного спокою
точки;
,
тобто у момент часу відносного спокою
точки;
3)
коли
![]() ,
тобто у випадку, коли
,
тобто у випадку, коли
![]() ,
а це означає, що вектор відносної
швидкості точки паралельний до осі
переносного обертання.
,
а це означає, що вектор відносної
швидкості точки паралельний до осі
переносного обертання.
В кожному з цих випадків формула (2.59) набуває вигляду
![]() . (2.62)
. (2.62)
Оскільки другий і третій випадок отримуємо найчастіше тільки в деякий момент часу, то формулу (2.62) застосовують при визначенні пришвидшення точки, яка здійснює складний рух у випадку переносного поступального руху.
Отже,
абсолютне пришвидшення точки, яка здійснює складний рух, у випадку переносного поступального руху дорівнює геометричній сумі її переносного і відносного пришвидшень.
Н
Рис. 108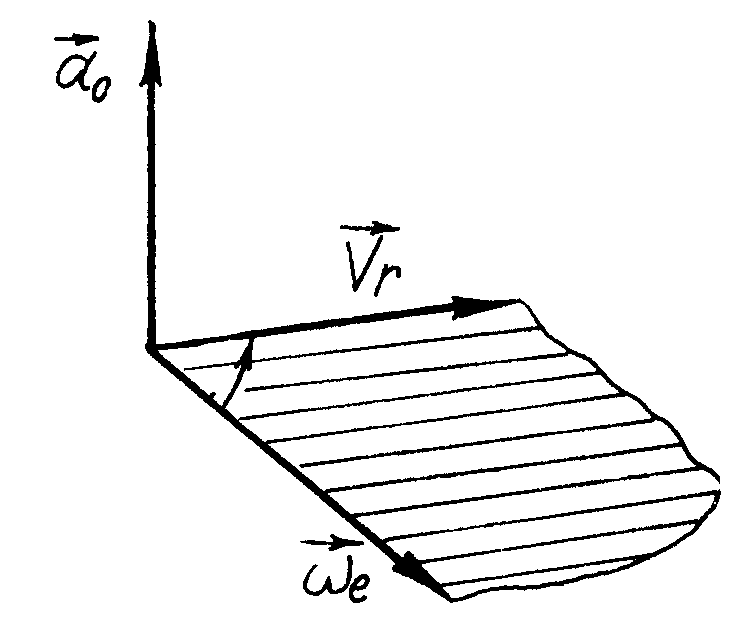
1.
За
правилом векторного добутку.
Вектор коріолісового пришвидшення
напрямлений перпендикулярно до площини,
яка проходить через вектори
![]() і
і
![]() в бік, звідки поворот вектора
до вектора
на найменший кут, щоб їх сумістити, видно
проти ходу годинникової стрілки
(рис.108).
в бік, звідки поворот вектора
до вектора
на найменший кут, щоб їх сумістити, видно
проти ходу годинникової стрілки
(рис.108).
2. За правилом Жуковського. Для визначення напряму вектора коріолісового пришвидшення необхідно вектор відносної швидкості спроектувати на площину, яка перпендикулярна до осі переносного обертання, і отриману проекцію в заданій площині повернути на кут 90 в бік переносного обертання. Це продемонстровано на рис. 109, де зображено:
![]()
Н – площина, яка перпендикулярна до осі ;
– вектор відносної швидкості точки;
![]() – проекція
вектора відносної швидкості на площину,
яка перпендикулярна до осі переносного
обертання;
– проекція
вектора відносної швидкості на площину,
яка перпендикулярна до осі переносного
обертання;
– вектор пришвидшення Коріоліса.
Правило Жуковського для визначення напряму вектора ефективно використовувати при плоскому складному русі, тобто тоді, коли складний рух точки відбувається в одній площині.
Виникнення
пришвидшення Коріоліса, як показує
аналіз складного руху точки, особливо
у випадках, коли
![]() ,
пояснюється двома причинами.
,
пояснюється двома причинами.
1. Відносний рух точки змінює величину вектора переносної швидкості.
2. Переносний рух точки змінює напрям вектора відносної швидкості.
Кожна
з цих причин в абсолютне пришвидшення
точки, яка здійснює складний рух, вносить
свій додаток
![]() ,
а пришвидшення Коріоліса дорівнює
подвійному векторному добутку
на
,
тобто
,
а пришвидшення Коріоліса дорівнює
подвійному векторному добутку
на
,
тобто
![]() .
.