

§ 19 Лема про паралельний перенос сили
З попереднього відомо, що сила – це ковзний вектор. Це положення і аксіома паралелограма сил дали можливість звести до канонічного вигляду систему збіжних сил. Для розширення наших можливостей щодо перетворення системи сил доведемо таку просту теорему (лему):
силу, прикладену до твердого тіла в деякій його точці, можна, не порушуючи її дії на тверде тіло, паралельно перенести в будь-яку точку тіла, якщо при цьому прикласти пару сил, момент якої векторно дорівнює моменту заданої сили відносно точки переносу.
Для
доведення цієї теореми розглянемо силу
,
яка при-кладена в точці
твердого тіла. Візьмемо на тілі довільну
точку
.
Радіус-вектор точки
відносно точки
позначимо
(рис. 37, а). Прикладемо в точці
дві сили
![]() ,
які вза-ємно зрівноважуються і одна з
них, наприклад,
,
геометрич-но дорівнює
,
тобто
,
тоді
,
які вза-ємно зрівноважуються і одна з
них, наприклад,
,
геометрич-но дорівнює
,
тобто
,
тоді
![]() (рис. 37, б).
Згідно з аксіомою приєднання і виключення
системи зрівноважених сил отримана
система сил буде еквівалентною заданій
силі
(рис. 37, б).
Згідно з аксіомою приєднання і виключення
системи зрівноважених сил отримана
система сил буде еквівалентною заданій
силі
![]() .
(а)
.
(а)
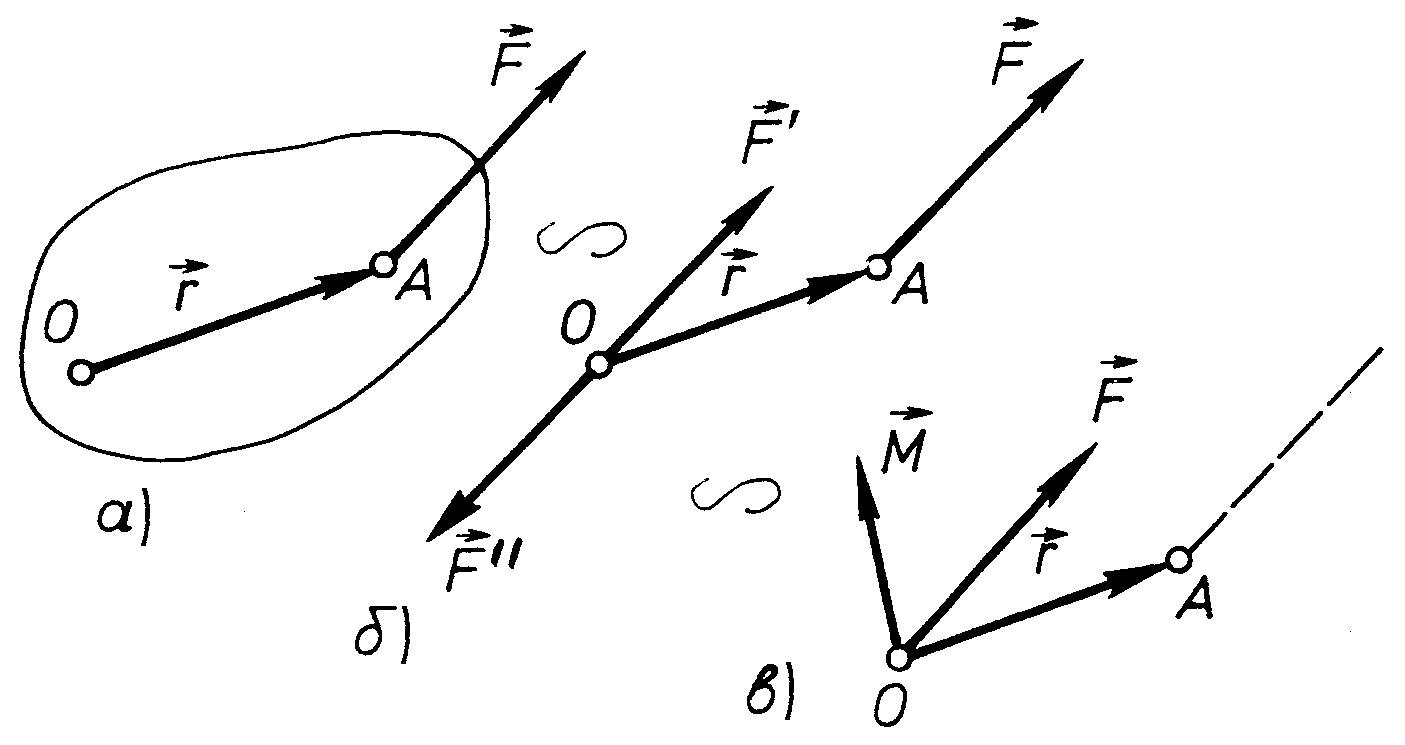
Рис. 37
Оскільки
сили
і
задовольняють умові
![]() ,
то ці сили утворюють пару сил, дію якої
на тверде тіло можна зобразити моментом
(рис. 37, в). Згідно з попереднім, момент
пари сил
геометрично дорівнює моменту однієї
сили пари (наприклад,
)
відносно точки прикладання іншої сили
пари, тобто
,
то ці сили утворюють пару сил, дію якої
на тверде тіло можна зобразити моментом
(рис. 37, в). Згідно з попереднім, момент
пари сил
геометрично дорівнює моменту однієї
сили пари (наприклад,
)
відносно точки прикладання іншої сили
пари, тобто
![]() .
(б)
.
(б)
Отже,
при паралельному переносі сили ( ) в довільну точ-ку отримуємо силу ( ), геометрично рівну заданій силі, і пару сил , момент якої геометрично дорівнює моменту заданої сили відносно точки переносу.
Зауважимо, що в літературі точку , куди переноситься сила, часто називають точкою зведення, а пару сил, яка при цьому утворюється, називають приєднаною парою. Якщо точка зведення буде знаходитись на лінії дії сили, то момент приєднаної пари буде дорівнювати нулеві, отже, пари сил фактично не буде, тоді ми отримаємо тільки одну силу, тобто ще раз переконуємось, що сила – це ковзний вектор.
§ 20 Зведення довільної системи сил до заданого центра
Дано
систему сил
![]() ,
що прикладені в точках
і як завгодно напрямлені в просторі
(рис. 38, а). Візьмемо довільну точку
,
яку назвемо центром зведення, і зведемо
всі задані сили до точки
.
Згідно з лемою про паралельний перенос
сили отримаємо
,
що прикладені в точках
і як завгодно напрямлені в просторі
(рис. 38, а). Візьмемо довільну точку
,
яку назвемо центром зведення, і зведемо
всі задані сили до точки
.
Згідно з лемою про паралельний перенос
сили отримаємо
![]() ;
;
![]() ;
;
. . . . . . . . . . . . . . . . . .
![]()
![]() .
.
Отже,
в точці
одержано систему сил
![]() і систему пар сил з моментами
і систему пар сил з моментами
![]() (рис. 38, б). Одержана система сил є збіжною,
бо всі сили прикладені до однієї точки
.
Геометрично склавши ці сили, знайдемо
їх рівнодійну (рис. 39)
(рис. 38, б). Одержана система сил є збіжною,
бо всі сили прикладені до однієї точки
.
Геометрично склавши ці сили, знайдемо
їх рівнодійну (рис. 39)
![]() .
.
Оскільки
![]() ,
то отримаємо
,
то отримаємо
![]() .
.
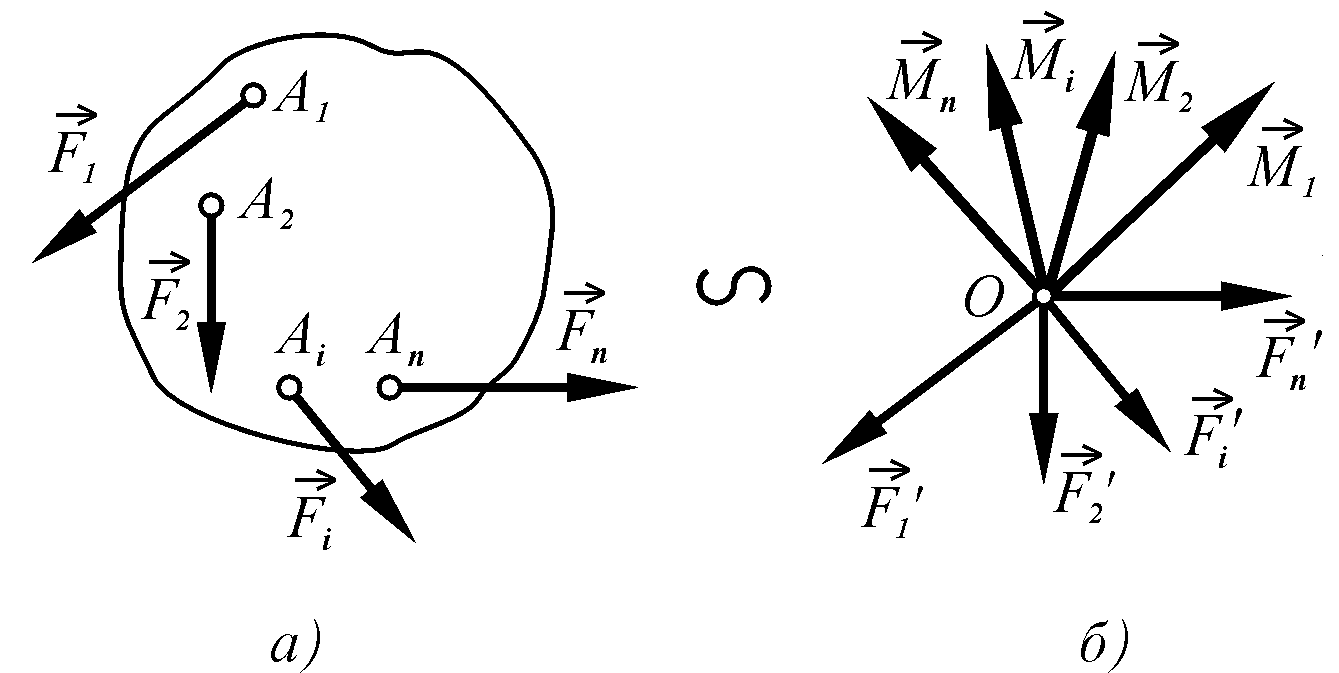
Рис. 38
Рис. 39 |
Рис. 40 |

В
отриманій рівності праворуч маємо
геометричну суму всіх сил заданої
системи, а це, як відомо (див. формулу
1.26), є її головний вектор. Отже, рівнодійна
отриманої системи сил геометрично
дорівнює головному вектору заданої
системи сил
![]() .
.
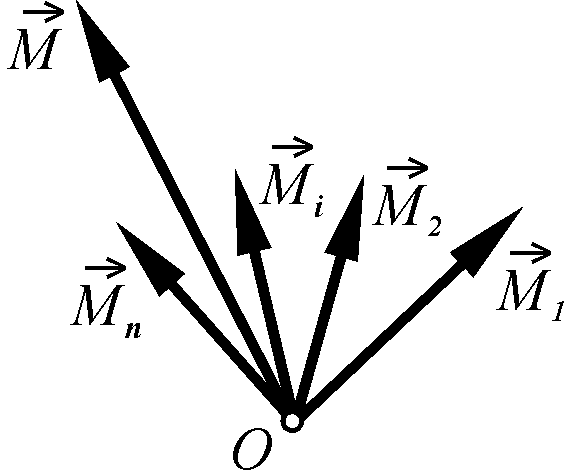
Систему отриманих пар сил замінимо еквівалентною парою, момент якої, як відомо з теореми про складання пар, дорівнює геометричній сумі моментів складових пар (рис. 40)
![]() .
.
Оскільки
![]() ,
то отримаємо
,
то отримаємо
![]() .
.
В
отриманій рівності праворуч маємо
геометричну суму моментів всіх сил
заданої системи відносно точки
,
тобто її головний момент відносно точки
.
Отже, момент пари сил, яка еквівалентна
отриманій системі приєднаних пар,
геометрично дорівнює головному моменту
заданої системи відносно точки зведення
![]() .
.
Таким чином, при зведенні довільної системи сил до заданого центра в даному центрі отримаємо одну силу, яка геометрично дорівнює головному вектору заданої системи сил, і пару сил, момент якої геометрично дорівнює головному моменту заданої системи сил відносно точки зведення (рис. 41).
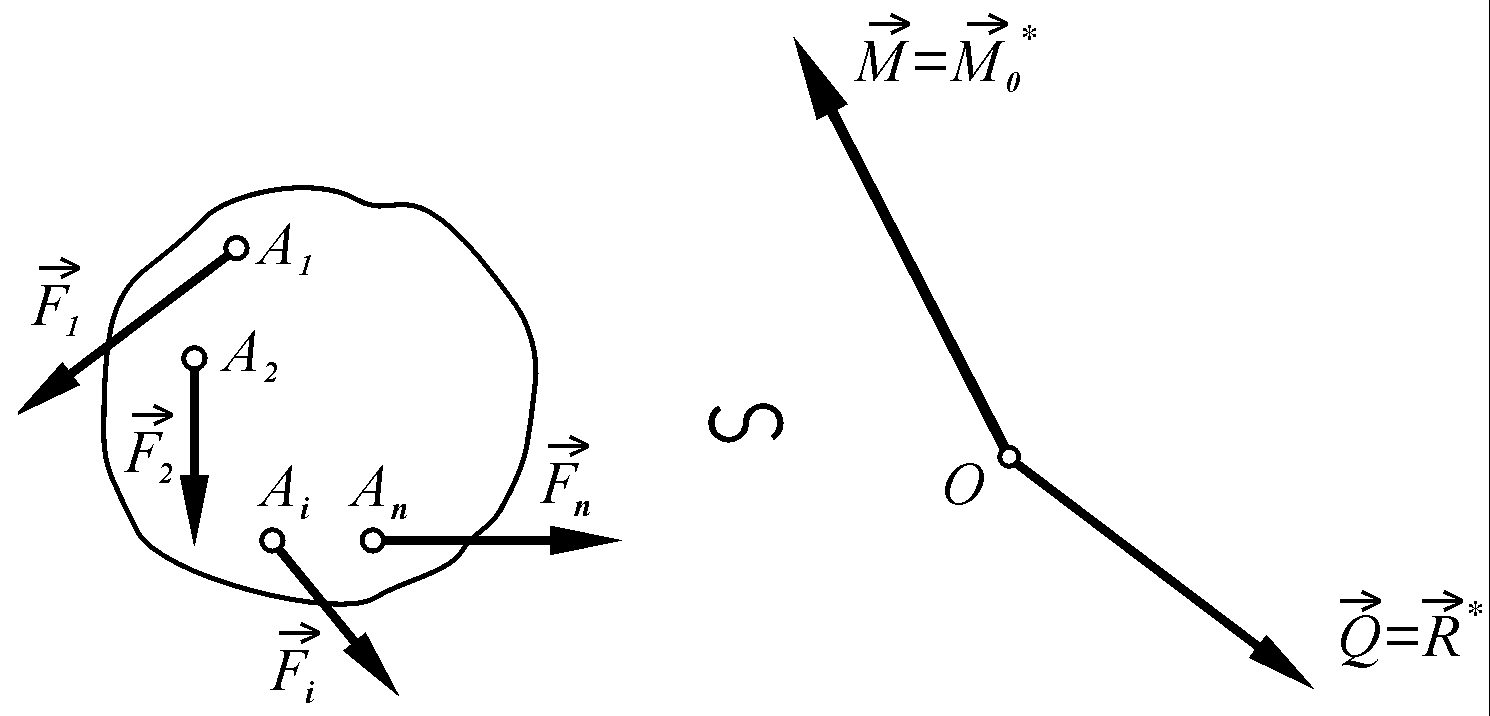
Рис. 41
Тобто, систему сил, розміщених довільно в просторі, завжди можна звести до однієї сили, яка дорівнює її головному вектору і прикладена в точці зведення, і до пари сил, момент якої геометрично дорівнює головному моменту системи відносно точки зведення
![]()
![]() .
(1.43)
.
(1.43)