

§ 46.3 Рівняння руху точки плоскої фігури
Щоб
отримати рівняння руху точки плоскої
фігури, розглянемо плоску фігуру, котра
переміщається в площині нерухомої
системи координат
![]() (рис. 115). За полюс плоскої фігури вибираємо
точку О
і через цей полюс проведемо рухому
систему координат
(рис. 115). За полюс плоскої фігури вибираємо
точку О
і через цей полюс проведемо рухому
систему координат
![]() ,
яка жорстко з’єднана з плоскою фігурою.
Положення довільної точки К
плоскої фігури в рухомій системі
координат
однозначно визначається координатами
,
яка жорстко з’єднана з плоскою фігурою.
Положення довільної точки К
плоскої фігури в рухомій системі
координат
однозначно визначається координатами
![]() ,
які при русі точки К,
що переміщується разом з плоскою фігурою,
очевидно не змінюються. Як видно з рис.
115, між координатами точки К
в двох системах координат
і
має місце залежність
,
які при русі точки К,
що переміщується разом з плоскою фігурою,
очевидно не змінюються. Як видно з рис.
115, між координатами точки К
в двох системах координат
і
має місце залежність
![]() ;
;
![]() .
.
Розкривши косинус і синус суми двох кутів,
![]() ,
,
![]() ,
,
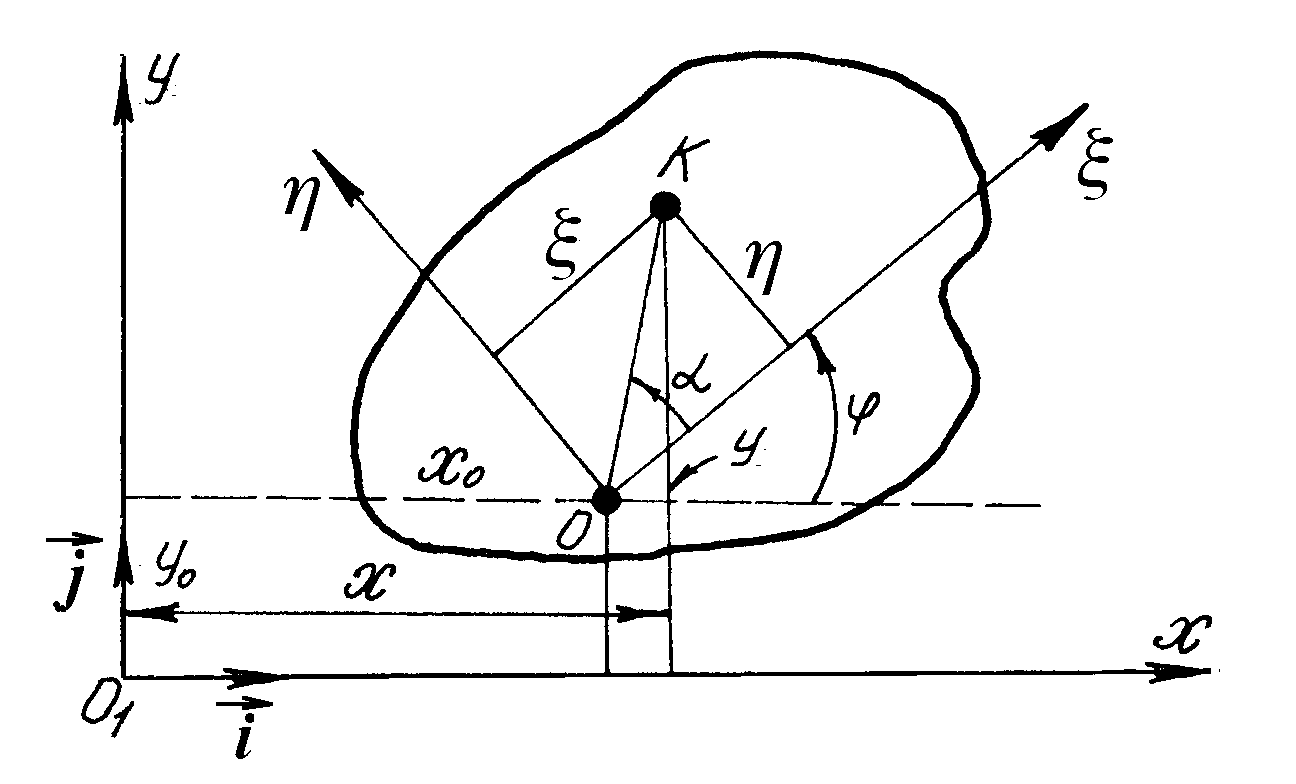
Рис. 115
і
враховуючи, що
![]() ,
,
![]() ,
отримуємо
,
отримуємо
![]() (2.64)
(2.64)
Рівняння
(2.64) є рівняннями руху точки плоскої
фігури. В цих рівняннях
![]() і
змінюються за законами (2.63),
– координати точки в системі координат,
яка жорстко з’єднана з плоскою фігурою
і для точки вони є постійними.
і
змінюються за законами (2.63),
– координати точки в системі координат,
яка жорстко з’єднана з плоскою фігурою
і для точки вони є постійними.
Користуючись формулами (2.8) – (2.13), і (2.64), можна аналогічно знайти швидкість і пришвидшення будь-якої точки плоскої фігури, тобто:
![]() ,
,
![]() .
.
Тут
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
Напрямні
косинуси векторів
і
![]() знаходяться за формулами
знаходяться за формулами
![]()
 ;
;
![]() ;
;
![]() ;
;
![]() .
.
Векторний спосіб знаходження швидкостей і пришвидшень точок плоскої фігури розглянуті в наступних параграфах.
§ 46.4 Теорема про швидкості точок плоскої фігури та її наслідок
Розглянемо плоску фігуру, котра рухається в площині рисунка (рис. 116). За полюс плоскої фігури виберемо точку О.
Н
Рис. 116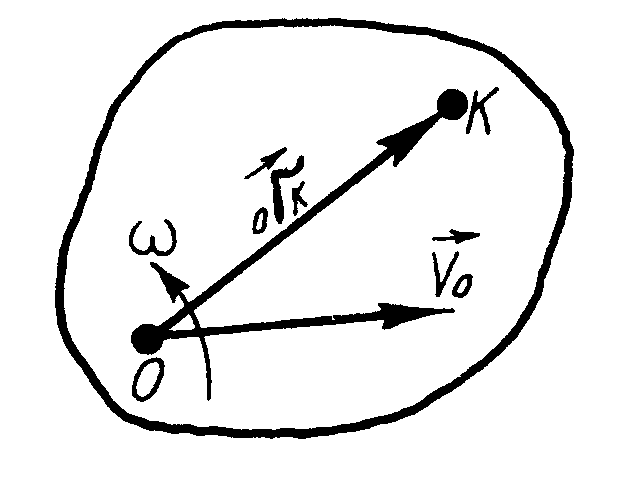
![]() ,
і навколо полюса плоска фігура обертається
з кутовою швидкістю
.
Візьмемо довільну точку К
плоскої фігури, положення якої відносно
полюса визначається радіусом-вектором
,
і навколо полюса плоска фігура обертається
з кутовою швидкістю
.
Візьмемо довільну точку К
плоскої фігури, положення якої відносно
полюса визначається радіусом-вектором
![]() ,
і визначимо її швидкість. Оскільки рух
плоскої фігури є складним рухом, який
складається з по-ступального руху разом
з полюсом і обертального руху навколо
полюса, то кожна точка плоскої фігури
здійснює складний рух, і швидкість точки
К
можна визначити за допомогою теореми
про додавання швидкостей точки, що
здійснює склад-ний рух (див. формулу
2.58). Для точки К
вона матиме вигляд
,
і визначимо її швидкість. Оскільки рух
плоскої фігури є складним рухом, який
складається з по-ступального руху разом
з полюсом і обертального руху навколо
полюса, то кожна точка плоскої фігури
здійснює складний рух, і швидкість точки
К
можна визначити за допомогою теореми
про додавання швидкостей точки, що
здійснює склад-ний рух (див. формулу
2.58). Для точки К
вона матиме вигляд
![]() . (а)
. (а)
Прийнявши поступальний рух плоскої фігури за переносний рух, отримаємо, що переносні швидкості всіх точок плоскої фігури будуть однаковими і дорівнюватимуть швидкості полюса
![]() .
(б)
.
(б)
Відносним рухом плоскої фігури є обертання її навколо полюса з кутовою швидкістю . Тому згідно з формулою Ейлера (див. формулу 2.53) для відносної швидкості матимемо
![]() .
.
Відносну
швидкість точки плоскої фігури позначають
так:
![]() .
Індекс зліва вказує полюс, а справа –
позначає точку, швидкість якої
визначається. Отже,
.
Індекс зліва вказує полюс, а справа –
позначає точку, швидкість якої
визначається. Отже,
![]() .
(в)
.
(в)
Підставляючи (б) і (в) в (а), отримуємо
![]() ,
,
або
![]() .
(2.65)
.
(2.65)
Формули (2.65) виражають теорему про швидкість точки плоскої фігури, яка читається так:
швидкість будь-якої точки плоскої фігури дорівнює геометричній сумі швидкості полюса і обертальної швидкості даної точки навколо полюса.
Отже,
щоб знайти швидкість точки плоскої
фігури, необхідно мати швидкість полюса
(
)
і швидкість даної точки в обертальному
русі плоскої фігури навколо полюса (![]() ).
).
В
Рис. 117
![]() ,
і він напрямлений перпендикулярно до
відрізка КО
в бік обертання плоскої фігури (рис.
117). Знаючи швидкість полюса
і визначивши швидкість точки в обертальному
русі навколо полюса
,
шукану швидкість знаходимо як діагональ
паралелограма, побудованого на векторах
і
.
,
і він напрямлений перпендикулярно до
відрізка КО
в бік обертання плоскої фігури (рис.
117). Знаючи швидкість полюса
і визначивши швидкість точки в обертальному
русі навколо полюса
,
шукану швидкість знаходимо як діагональ
паралелограма, побудованого на векторах
і
.
З доведеної теореми випливає наслідок:
проекції швидкостей двох точок плоскої фігури на вісь, яка проходить через ці дві точки, рівні між собою.
Для
доведення цього наслідку розглянемо
дві довільні точки А
і В
плоскої фігури, яка рухається у площині
рисунка. Вектори швидкостей цих точок
![]() і
і
![]() (рис. 118) утворюють з прямою АВ
відповідно
кути
і
.
Приймаючи точку А
за полюс, швидкість точки В
згідно з (2.65) буде визначатися формулою
(рис. 118) утворюють з прямою АВ
відповідно
кути
і
.
Приймаючи точку А
за полюс, швидкість точки В
згідно з (2.65) буде визначатися формулою
![]() .
(г)
.
(г)
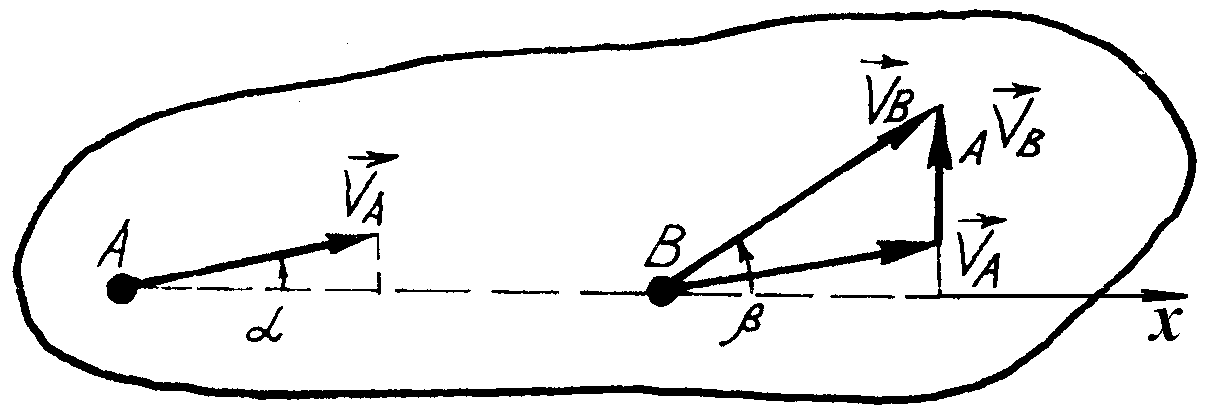
Рис. 118
Проектуючи
векторну рівність (г) на вісь Ах
і
знаючи, що
![]() ,
матимемо
,
матимемо
![]() .
.
Оскільки
![]() ,
отримаємо
,
отримаємо
![]() ,
,
тобто
![]() .
(2.66)
.
(2.66)
Отже, наслідок доведено. Цей наслідок часто називають теоремою про проекції швидкостей точок плоскої фігури. Необхідно пам’ятати, що ця теорема має місце тільки тоді, коли вектори швидкостей точок плоскої фігури проектуємого на вісь, яка проходить через ці точки. Треба зазначити, що формула (2.66) має місце для будь-якого руху твердого тіла, що легко довести, скориставшись залежністю (2.31).