

§ 46.2 Рівняння руху плоскої фігури
Розглянемо
плоску фігуру, що переміщається в площині
нерухомої системи координат
![]() (рис. 113). Положення плоскої фігури в цій
площині однозначно визначається
положенням двох її точок, наприклад, О
і А.
Оскільки відстань між точками О
і А
залишається незмінною, то з чотирьох
координат (
(рис. 113). Положення плоскої фігури в цій
площині однозначно визначається
положенням двох її точок, наприклад, О
і А.
Оскільки відстань між точками О
і А
залишається незмінною, то з чотирьох
координат (![]() ),
що визначають положення цих точок,
незалежними є тільки три. Отже, для
визначення положення плоскої фігури
потрібні тільки три незалежних параметри.
Такими параметрами можуть бути:
),
що визначають положення цих точок,
незалежними є тільки три. Отже, для
визначення положення плоскої фігури
потрібні тільки три незалежних параметри.
Такими параметрами можуть бути:
![]() – координати точки О;
–
кут повороту відрізка, що з’єднує точки
О
і А
відносно осі абсцис. При русі плоскої
фігури ці параметри змінюються і є
функціями часу
,
тобто
– координати точки О;
–
кут повороту відрізка, що з’єднує точки
О
і А
відносно осі абсцис. При русі плоскої
фігури ці параметри змінюються і є
функціями часу
,
тобто
 (2.63)
(2.63)
Рівняння (2.63), за допомогою яких можна визначити положення плоскої фігури в будь-який момент часу, є рівняннями її руху. А оскільки рух плоскої фігури визначає плоскопаралельний рух твердого тіла, то рівняння (2.63) є рівняннями плоскопаралельного руху твердого тіла.
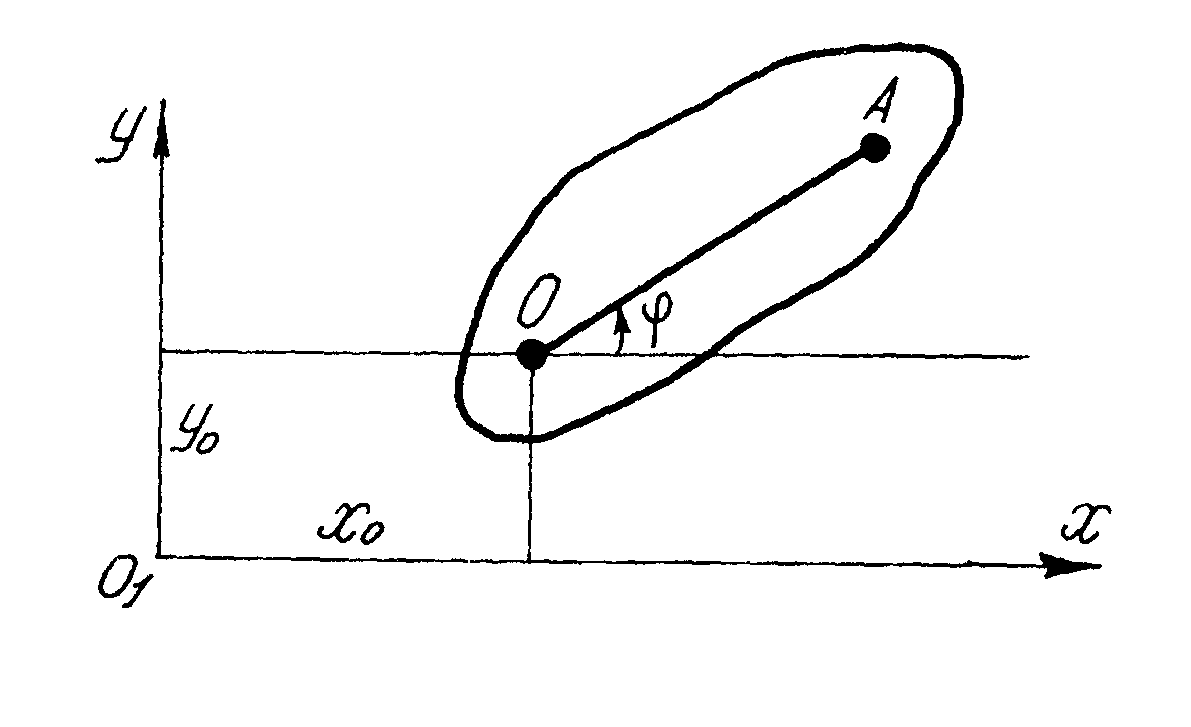
Рис. 113
Розглянемо часткові випадки:
1. Припустимо, що плоска фігура здійснює рух, при якому
В даному випадку при русі плоскої фігури відрізок ОА буде паралельним своєму початковому положенню, а це означає, що плоска фігура здійснює поступальний рух.
2. У випадку, коли
плоска фігура, очевидно, буде здійснювати обертальний рух.
При русі плоскої фігури одночасно змінюються три параметри (див. рівняння 2.63). Таким чином, можна стверджувати, що:
плоскопаралельний рух твердого тіла є складним рухом; він складається з поступального і оберталь-ного рухів.
Точка, з якою плоска фігура здійснює поступальний рух, називається полюсом.
В
даному випадку за полюс взято точку О.
За полюс плоскої фігури можна брати
будь-яку її точку. Дослідимо залежність
складових рухів плоскої фігури від
вибору полюса. Для цього розглянемо два
положення плоскої фігури, що рухається
в площині
(рис. 114):
![]() –
положення плоскої фігури в момент часу
;
–
положення плоскої фігури в момент часу
;
![]() – її положення в момент часу
– її положення в момент часу
![]() ,
тобто за проміжок часу
,
тобто за проміжок часу
![]() плоска фігура перемістилась з положення
в
положення
.
На рис.114 також вказано:
плоска фігура перемістилась з положення
в
положення
.
На рис.114 також вказано:
![]() – положення
плоскої фігури після поступального її
переміщення з положення І в положення
ІІ у випадку, коли за плюс вибрано точку
– положення
плоскої фігури після поступального її
переміщення з положення І в положення
ІІ у випадку, коли за плюс вибрано точку
![]() ;
;
![]() – положення
плоскої фігури після поступального її
переміщення з положення І в положення
ІІ у випадку, коли за плюс вибрано точку
– положення
плоскої фігури після поступального її
переміщення з положення І в положення
ІІ у випадку, коли за плюс вибрано точку
![]() ;
;
![]() – кути
повороту плоскої фігури навколо
відповідних полюсів.
– кути
повороту плоскої фігури навколо
відповідних полюсів.
Отже,
якщо за полюс плоскої фігури вибрано
точку
,
то при переміщенні її з положення І в
положення ІІ за проміжок часу
вона здійснить поступальний рух по
траєкторії
![]() і повернеться на кут
і повернеться на кут
![]() .
Коли за полюс плоскої фігури буде вибрано
точку
,
то при переміщенні її з положення І в
положення ІІ за цей же проміжок часу
поступальний рух вона здійснить по
траєкторії
.
Коли за полюс плоскої фігури буде вибрано
точку
,
то при переміщенні її з положення І в
положення ІІ за цей же проміжок часу
поступальний рух вона здійснить по
траєкторії
![]() і повернеться на кут
і повернеться на кут
![]() .
З рис. 114 видно, що траєкторії руху і
переміщення точок А
і В
різні, а кути повороту
і
однакові за величиною і знаком, отже,
можна стверджувати, що
.
З рис. 114 видно, що траєкторії руху і
переміщення точок А
і В
різні, а кути повороту
і
однакові за величиною і знаком, отже,
можна стверджувати, що
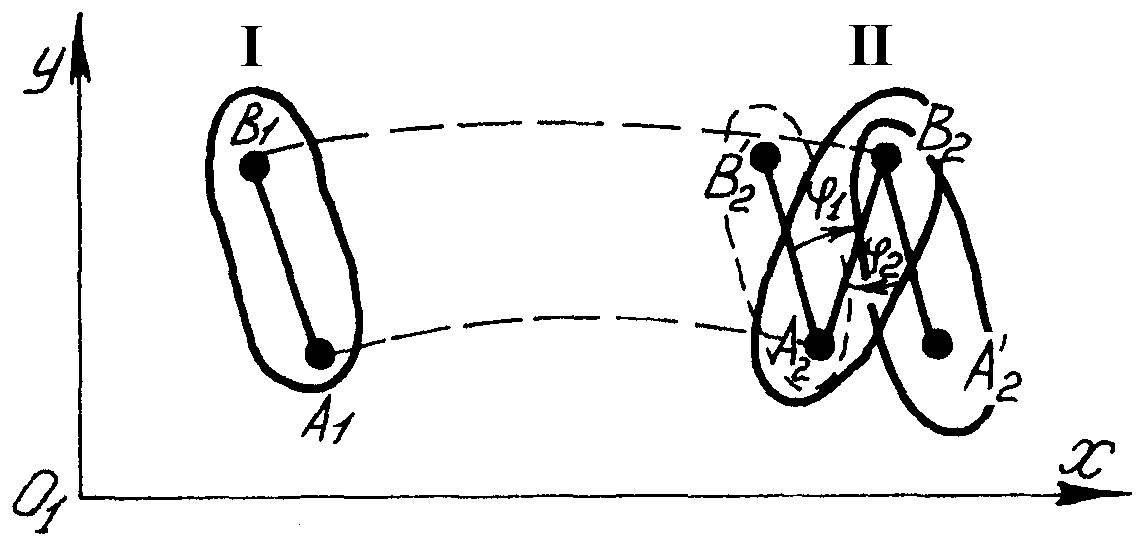
Рис. 114
поступальний рух плоскої фігури залежить від вибору полюса, а обертальний її рух не залежить від вибору полюса.
Зауваження:
1. Додатний напрям кута вибирається проти ходу годинникової стрілки.
2. Модулі кутової швидкості і пришвидшення дорівнюють
![]() ;
;
 .
.
3. Вектори і направляються перпендикулярно до площини руху згідно з правилом, запропонованим при обертальному русі тіла (§ 43.4). Вектори і є вільними векторами і можуть бути прикладені в будь-якій точці плоскої фігури.