

1.1 Система збіжних сил
Система збіжних сил – це система сил, лінії дії яких перетинаються в одній точці.
§ 7 Зведення системи збіжних сил до канонічного вигляду
Нехай на тверде тіло діє система сил (рис. 20 а). Діюча система сил є збіжною, бо лінії дії всіх сил перетинаються в одній точці – точці . Оскільки сила – це ковзний вектор, перенесемо всі сили до точки (рис. 20 б). Таким чином, ми отримали систему сил, прикладених до однієї точки. Вона еквівалентна заданій системі сил.
На
основі аксіоми паралелограма сил
проведемо послідовне додавання сил
(див. рис. 20 в, де для наочності додавання
проведено за правилом трикутника).
Спочатку додаємо сили
і
і знаходимо рівнодійну
![]()
![]() (а)
(а)
(індекс в позначенні рівнодійної відповідає кількості доданих сил).
Далі
додаємо
і
(будуючи знову трикутник цих сил) і
знаходимо рівнодійну
![]()
![]() .
(б)
.
(б)
Продовжуючи додавання, дійдемо до останньої сили і отримаємо
![]() ,
(в)
,
(в)
тобто замість системи сил, що діяли на тверде тіло, ми отримали силу, дія якої еквівалентна вихідній системі сил.
Таким чином, для системи збіжних сил розв’язана перша основна задача статики – систему збіжних сил зведено до канонічного вигляду.
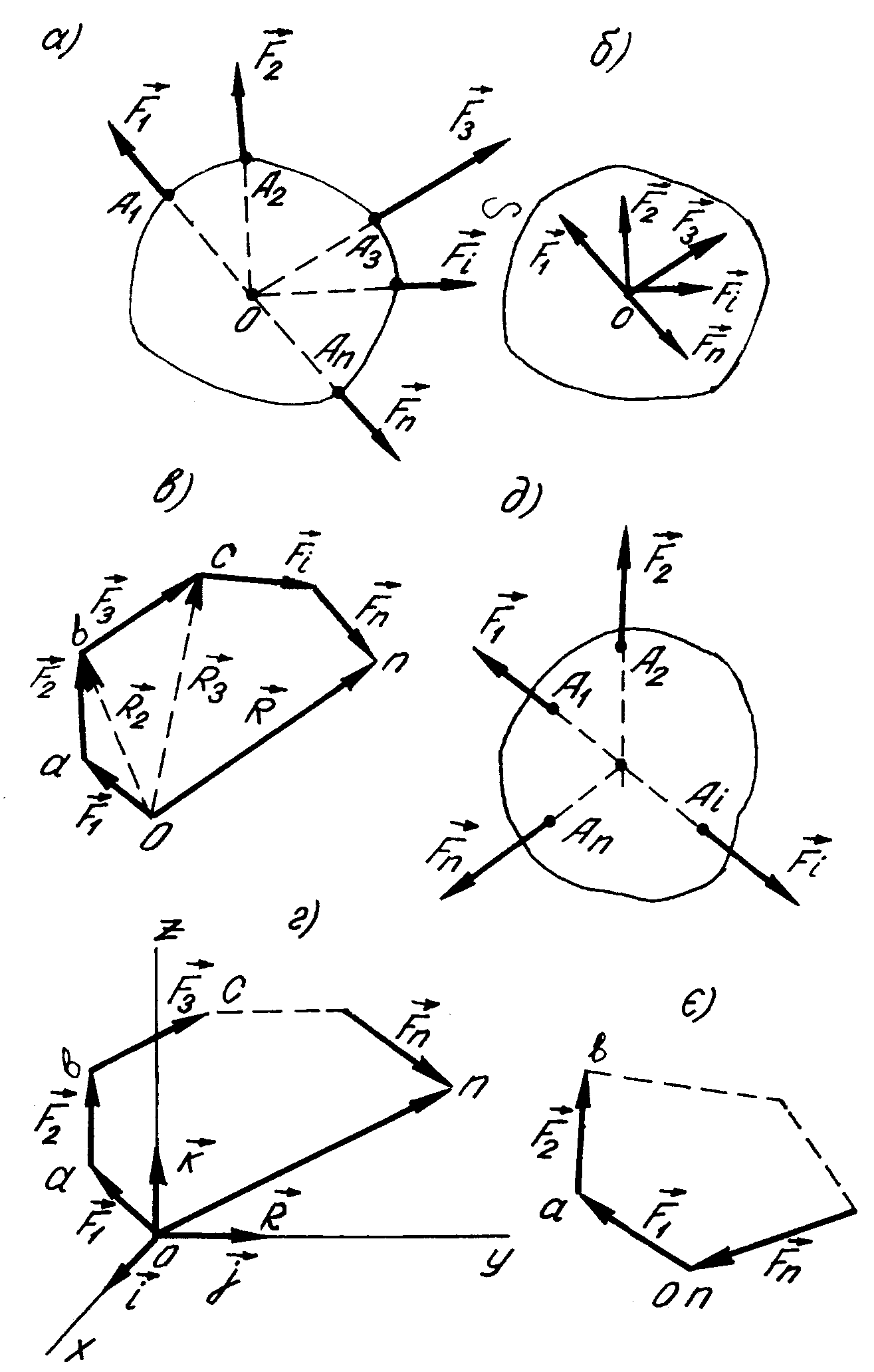
Рис. 20
Канонічним виглядом системи збіжних сил є одна сила (рівнодійна)
![]() .
(1.5)
.
(1.5)
До того ж, як видно з векторної рівності (в), рівнодійна системи збіжних сил дорівнює геометричній сумі всіх сил системи
![]() .
(1.6)
.
(1.6)
Векторний
багатокутник
![]() (рис. 20 в), отриманий при складанні сил,
в теоретичній механіці називається
силовим.
(рис. 20 в), отриманий при складанні сил,
в теоретичній механіці називається
силовим.
На основі векторної рівності (1.6) можна встановити два способи визначення рівнодійної.
1. Геометричний спосіб визначення рівнодійної.
Щоб геометрично (шляхом однієї побудови) визначити рівнодійну, необхідно скласти всі сили, тобто побудувати силовий багатокутник (рис. 20 г). Зауважимо, що додавання сил можна проводити в будь-якій послідовності. Замикаюча сторона силового багатокутника, яка напрямлена проти його обходу, визначає рівнодійну як за величиною, так і за напрямом (рис. 20 г).
2. Аналітичний спосіб визначення рівнодійної.
З математики відомо, що кожну векторну рівність можна спроектувати на вісь. При проектуванні векторної рівності на вісь знак рівності зберігається, а проекція геометричної суми на вісь дає алгебраїчну суму відповідних проекцій векторів на задану вісь.
Спроектувавши рівність (1.6) на координатні осі, які вказані на рис. 20 г, отримаємо
![]() ;
;
![]() ;
;
![]() .
(1.7)
.
(1.7)
Формули
(1.7) визначають проекції рівнодійної
системи сил на декартові осі координат.
В даних формулах
![]() ,
,
![]() ,
,
![]() – проекції
– проекції
![]() -ої
сили (
-ої
сили (![]() )
системи на декартові осі координат.
Згідно з цими формулами маємо, що
)
системи на декартові осі координат.
Згідно з цими формулами маємо, що
проекція рівнодійної системи сил на вісь дорівнює алгебраїчній сумі проекцій всіх сил системи на дану вісь.
Оскільки формули (1.7) визначають проекції рівнодійної на три взаємно перпендикулярні осі, то модуль її обчислюється за формулою
![]() .
(1.8)
.
(1.8)
Напрям вектора рівнодійної визначається кутами, які утворює вектор з координатними осями. З визначення поняття “проекція на вісь” (див. додаток 2) маємо
![]() ;
;
![]() ;
;
![]() .
(1.9)
.
(1.9)
Формули (1.9) визначають напрямні косинуси вектора рівнодійної, а сукупність формул (1.7)–(1.9) аналітично визначає вектор рівнодійної.