

2.1 Кінематика точки
Рух точки як об’єкта, розмірами якого нехтують, можна розглядати як простий або складний. Простий рух і відносний у випадку складного руху точки можна задати і вивчити трьома способами: векторним, координатним і натуральним.
§ 36 Векторний спосіб вивчення руху точки
В
даному способі положення рухомої точки
визначається вектором![]() ,
початок якого знаходиться в деякому
нерухомому центрі
.
Цей вектор позначається буквою
і називається
радіусом-вектором рухомої точки
.
При русі точки
радіус-вектор
неперервно змінюється як за напрямом,
так і за величною. Наприклад, в момент
,
початок якого знаходиться в деякому
нерухомому центрі
.
Цей вектор позначається буквою
і називається
радіусом-вектором рухомої точки
.
При русі точки
радіус-вектор
неперервно змінюється як за напрямом,
так і за величною. Наприклад, в момент
![]() рухома точка займає положення
рухома точка займає положення
![]() ,
а її радіус-вектор
приймає значення
,
а її радіус-вектор
приймає значення
![]() .
Отже,
є функцією часу
.
Отже,
є функцією часу
![]() .
Математично це можна описати так:
.
Математично це можна описати так:
![]() (2.1)
(2.1)
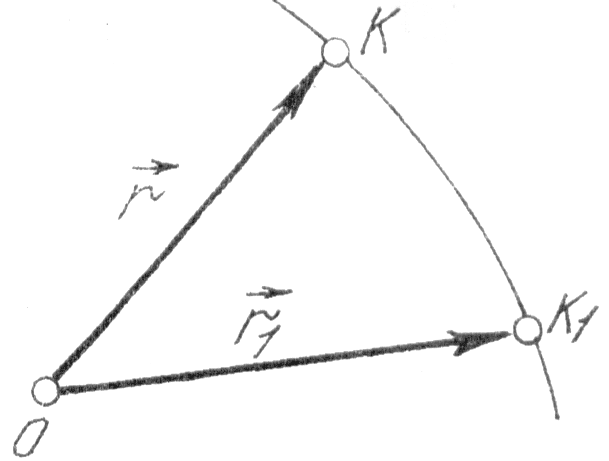
Рівняння (2.1) є рівнянням (законом) руху точки у векторній формі. Для визначення траєкторії точки згадаємо одне визначення з математики:
лінія, яка описується в просторі кінцем змінного вектора, початок якого знаходиться в нерухомій точці, називається годографом даного вектора.
Отже, у відповідності з рис. 84 траєкторією руху точки при векторному способі задання її руху є годограф її радіуса-вектора .
Для
визначення швидкості точки розглянемо
два її послідовні положення. Припустимо,
що в момент часу
рухома точка перебуває в положенні
,
яке визначається радіусом-вектором
,
а в момент
![]() – в положенні
,
яке визначається радіусом-вектором
– в положенні
,
яке визначається радіусом-вектором
![]() (рис. 85).
(рис. 85).
Отже,
за проміжок часу
![]() точка змістилася на вектор
точка змістилася на вектор
![]() .
Відношення приросту
.
Відношення приросту
![]() радіуса-вектора точки до приросту часу
називається середньою швидкістю точки
за проміжок часу
,
тобто
радіуса-вектора точки до приросту часу
називається середньою швидкістю точки
за проміжок часу
,
тобто
![]() .
.
Вектор
середньої швидкості напрямлений по
вектору
,
тобто по хорді
![]() .
.
Рис. 84 |
Рис. 85 |
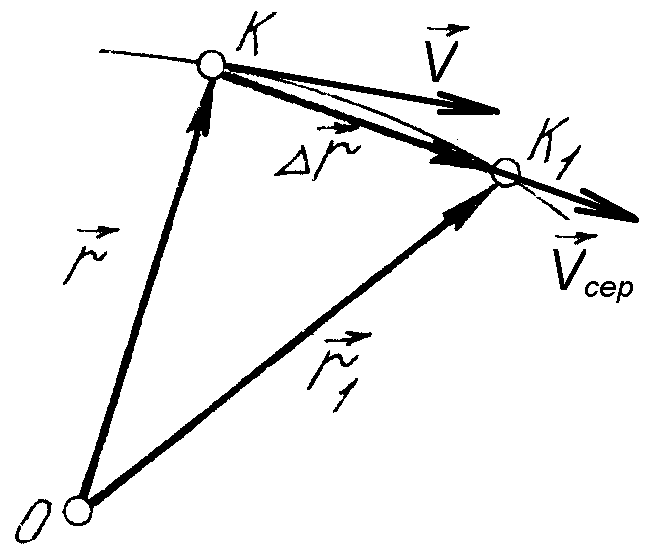
Швидкість точки в даний момент, або просто швидкість точки, – це граничне значення середньої швидкості, коли приріст часу прямує до нуля, тобто:
![]() .
(а)
.
(а)
Згідно з рівнянням (2.1) є неперервною функцією часу , а це означає, що границя цього відношення є похідна від за часом .
Отже,
![]() .
(2.2)
.
(2.2)
Швидкість точки дорівнює першій похідній за часом від її радіуса-вектора.
Зауваження.
Похідні за часом в механіці прийнято
позначити крапочками зверху, тобто:
![]() ;
;
![]() і т.д.
і т.д.
З отриманої формули видно:
1) швидкість точки – це вектор, про що було сказано вище;
2)
вектор швидкості точки напрямлений по
дотичній до її траєкторії в бік її руху,
бо граничне положення вектора
,
коли
![]() ,
є положення дотичної до годографа
вектора
,
є положення дотичної до годографа
вектора
![]() (рис. 85).
(рис. 85).
Д
Рис.
86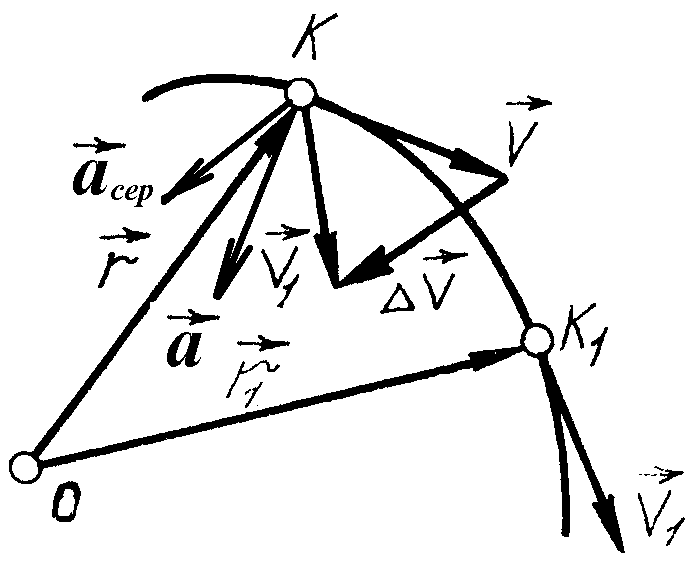
![]() ,
а в момент
– в положенні
,
де її швидкість
,
а в момент
– в положенні
,
де її швидкість
![]() (рис. 86). Отже, за проміжок часу
вектор швидкості точки отримав приріст
(рис. 86). Отже, за проміжок часу
вектор швидкості точки отримав приріст
![]() .
Цей приріст знайдемо, якщо вектор
умовно перенесемо в точку
і з’єднаємо кінці векторів
і
(рис. 86).
.
Цей приріст знайдемо, якщо вектор
умовно перенесемо в точку
і з’єднаємо кінці векторів
і
(рис. 86).
Відношення
приросту
![]() вектора
швидкості точки до приросту часу
називається середнім пришвидшенням
точки за проміжок часу
,
тобто:
вектора
швидкості точки до приросту часу
називається середнім пришвидшенням
точки за проміжок часу
,
тобто:
![]()
Вектор середнього пришвидшення напрямляється по вектору (рис. 86).
Пришвидшення точки в даний момент часу, або просто пришвидшення точки, – це є граничне значення середнього пришвидшення коли приріст часу прямує до нуля, тобто:
![]()
Отже
![]() (2.3)
(2.3)
Пришвидшення точки дорівнює першій похідній за часом від вектора її швидкості.
Якщо врахувати формулу (2.2) для швидкості, то отримаємо
![]() (2.3)
(2.3)
Пришвидшення точки дорівнює другій похідній за часом від її радіуса-вектора.
З отриманих формул випливає:
1. Пришвидшення точки – це вектор.
2
Рис.
87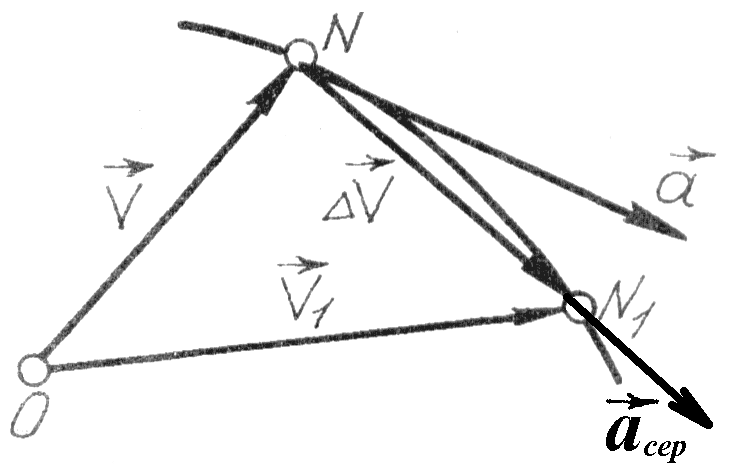
3.
Вектор пришвидшення точки напрямлений
по дотичній до годографа вектора її
швидкості. І дійсно, якщо побудувати
годограф вектора швидкості (рис. 87), то
вектор
– це хорда
![]() ,
граничне положення якої, коли
,
граничне положення якої, коли
![]() ,
є дотична.
,
є дотична.