

2.2 Кінематика твердого тіла
Тверде тіло, як і точка, може здійснювати як простий, так і складний рухи. До простих видів руху тіла відносяться поступальний рух твердого тіла і обертання твердого тіла навколо нерухомої осі. Ці рухи твердого тіла не можна звести ще до простіших видів руху, і тому є найпростішими видами руху твердого тіла. Всі інші види руху тіл, які спостерігаються в природі і техніці, є складними, бо, як буде показано в наступних розділах, вони складаються з найпростіших видів руху.
При вивченні кінематики як простих, так і складних видів руху твердого тіла розв’язуються дві задачі. З самого початку визначають кінематичні характеристики руху тіла як цілого об’єкта. Отримавши відповідні формули і співвідношення, приступають до визначення кінематичних характеристик руху окремої його точки. Отже, в кінематиці твердого тіла є формули, які визначають кінематичні характеристики руху тіла, і формули, які визначають кінематичні характеристики руху окремої його точки.
При русі твердого тіла радіуси-вектори двох його точок в кожний момент часу задовольняють таке співвідношення (рис. 95):
Рис. 95![]()
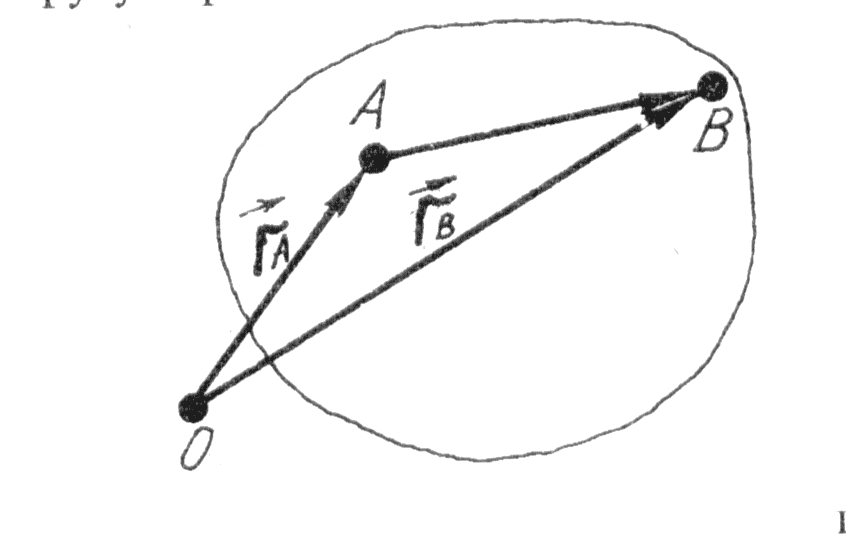
Продиференціювавши цю залежність за часом, отримаємо
![]() (2.31)
(2.31)
Отримана
формула відображає залежність між
швидкостями двох точок тіла в будь-якому
його русі. Необхідно пам’ятати, що в
цій формулі вектор
![]() може змінюватись тільки за напрямом.
Його величина
може змінюватись тільки за напрямом.
Його величина
![]() бо він з’єднує дві точки твердого тіла.
бо він з’єднує дві точки твердого тіла.
Якщо з рівності (2.31) взяти ще одну похідну за часом, то отримаємо залежність між пришвидшеннями двох точок тіла
![]() . (2.32)
. (2.32)
§ 42 Поступальний рух твердого тіла
Поступальним рухом твердого тіла називається такий його рух, при якому будь-яка пряма, що проведена в тілі, залишається паралельною до свого початкового положення.
Найпростішими прикладами поступального руху тіла є:
1. Рух поршня в автомобільному двигуні.
2. Рух стола поздовжньо-стругального верстата.
3. Рух спарника паровозних коліс (рис. 96).
Н
Рис. 96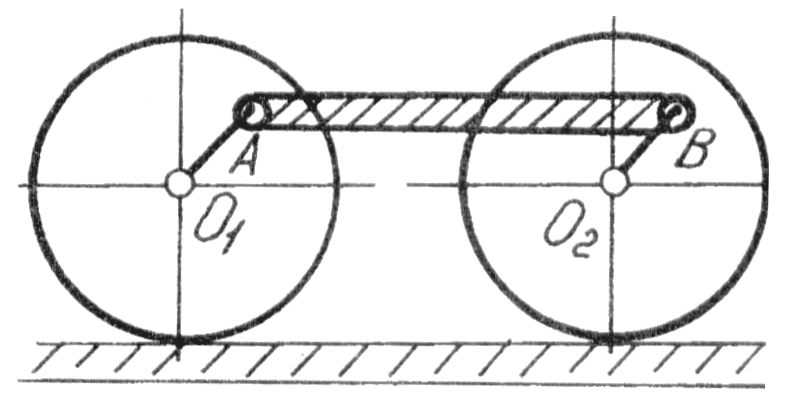
Н
Рис. 97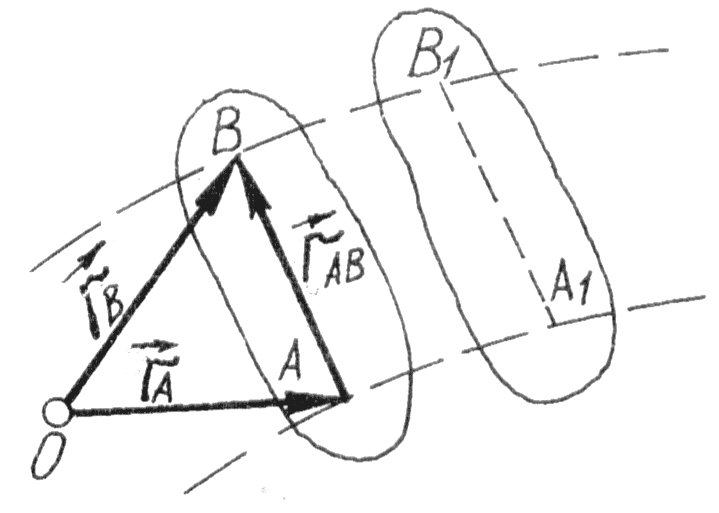
![]() –
радіус-вектор
точки
;
–
радіус-вектор
точки
;
![]() –
радіус-вектор
точки
;
–
радіус-вектор
точки
;
![]() –
радіус-вектор
точки
відносно точки
.
–
радіус-вектор
точки
відносно точки
.
Оскільки
тіло здійснює поступальний рух
![]() ,
то вектор
,
то вектор
![]() не змінює свого напряму, тобто
не змінює свого напряму, тобто
![]() .
Тоді формула (2.31) набуває вигляду
.
Тоді формула (2.31) набуває вигляду
![]() ,
(а)
,
(а)
тобто
![]() .
(б)
.
(б)
Отже,
при поступальному русі твердого тіла швидкості його точок геометрично рівні.
Проінтегрувавши векторну рівність (а), отримаємо
![]() (в)
(в)
З отриманої векторної рівності бачимо, що положення точки в будь-який момент часу можна отримати шляхом зміщення точки на постійний вектор. Отже, траєкторія точки однакова з траєкторією точки , тільки зміщена на постійний вектор.
Диференціюючи рівність (б) за часом, отримаємо
![]()
або
![]() (г)
(г)
тобто:
при поступальному русі твердого тіла пришвидшення його точок геометрично рівні.
Враховуючи отримане, можна сформулювати таку
теорему:
при поступальному русі тіла всі його точки описують однакові траєкторії і в кожний момент часу ма-ють геометрично рівні швидкості і пришвидшення.
А це означає, що поступальний рух твердого тіла визначається рухом окремої його точки.
Ця обставина уможливлює вивчення поступального руху тіла звести до вивчення руху однієї з його точок, тобто до задачі кінематики точки, яка розглянута вище. Наприклад, якщо необхідно записати рівняння поступального руху твердого тіла, то записують рівняння руху якої-небудь його точки
![]() ,
, ![]() ,
, ![]() .
(2.33)
.
(2.33)
Рівняння (2.33) за умови, що точка належить тілу, яке здійснює поступальний рух, називається рівнянням поступального руху твердого тіла. Як буде показано в наступному розділі теоретичної механіки, найефективніше такою точкою вибирати центр мас тіла.