

§ 43.2 Рівняння рівномірного і рівнозмінного обертання
Обертання з постійною кутовою швидкістю називається рівномірним.
Отже,
для рівномірного обертання
![]() Оскільки за формулою (2.35)
Оскільки за формулою (2.35)
![]()
то
![]()
Інтегруючи і враховуючи, що в даному випадку є сталою величною, отримуємо
![]() (2.40)
(2.40)
де
![]() – початковий кут повороту. Рівняння
(2.40) – це рівняння рівномірного обертання
тіла навколо нерухомої осі.
– початковий кут повороту. Рівняння
(2.40) – це рівняння рівномірного обертання
тіла навколо нерухомої осі.
Обертання з постійним кутовим пришвидшенням називається рівнозмінним.
Отже,
для рівнозмінного обертання
![]() З формули (2.36) маємо
З формули (2.36) маємо
![]()
тобто:
![]() .
.
Інтегруючи
і маючи на увазі, що
![]() отримаємо
отримаємо
![]() (а)
(а)
Знаючи,
що
![]() маємо
маємо
![]()
Ще раз інтегруючи, знаходимо
![]() (б)
(б)
Сталі
інтегрування
![]() і
і
![]() визначимо з початкових умов. Припустимо,
що при
визначимо з початкових умов. Припустимо,
що при
![]() кутова швидкість
кутова швидкість
![]() ,
а кут повороту
,
а кут повороту
![]() Тоді з виразів (а) і (б) знайдемо, що
Тоді з виразів (а) і (б) знайдемо, що
![]()
![]() Остаточно матимемо
Остаточно матимемо
закон зміни алгебраїчної кутової швидкості при рівнозмінному обертанні
![]() (2.41)
(2.41)
закон рівнозмінного обертання тіла навколо нерухомої осі
![]() (2.42)
(2.42)
У
формулах (2.40)-(2.41)
![]() ,
,
![]() ,
де
і
,
де
і
![]() – величини кутової швидкості і кутового
пришвидшення.
– величини кутової швидкості і кутового
пришвидшення.
§ 43.3 Швидкість і пришвидшення точки тіла, яке обертається навколо нерухомої осі
Як
було сказано вище, траєкторіями точки
тіла, що обертається навколо нерухомої
осі, є кола, площини яких перпендикулярні
до осі обертання і центри яких лежать
на цій осі. Радіуси цих кіл, а це будуть
відстані точок до осі обертання,
позначають буквою
![]() На рис. 101 зображено траєкторією деякої
точки
тіла, що обертається навколо нерухомої
осі.
На рис. 101 зображено траєкторією деякої
точки
тіла, що обертається навколо нерухомої
осі.
Т
Рис. 101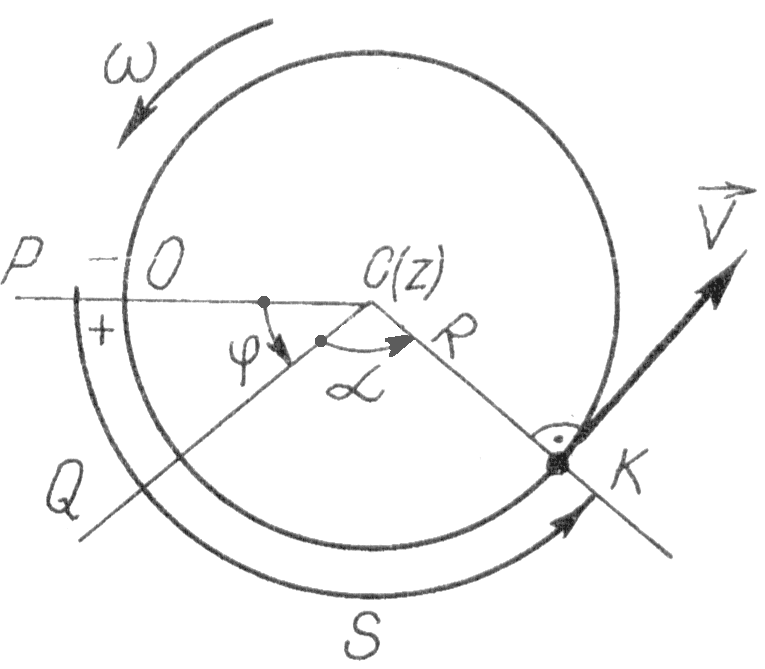
![]() – слід
нерухомої площини;
– слід
нерухомої площини;
![]() – слід
рухомої площини;
– слід
рухомої площини;
– кут повороту тіла;
– кут,
який визначає положення точки
відносно рухомої площини
![]()
Оскільки
відомо траєкторію, по якій рухається
точка
![]() то для визначення її кінематичних
характеристик руху використаємо
положення і формули натурального способу
задання руху точки.
то для визначення її кінематичних
характеристик руху використаємо
положення і формули натурального способу
задання руху точки.
Як
відомо (див. § 40), в натуральному способі
задання руху точки положення її на
траєкторії визначається дуговою
координатою
![]() В даному випадку такою дуговою координатою
є дуга
В даному випадку такою дуговою координатою
є дуга
![]() отже
отже
![]() .
.
Якщо
радіус кола, по якому рухається точка
позначити
![]() то матимемо
то матимемо
![]() (2.43)
(2.43)
Рівняння
(2.43) – це закон руху по траєкторії точки
тіла, яке обертається навколо нерухомої
осі. В даному рівнянні
є функцією часу і в загальному випадку
змінюється за законом (2.34), а кут
![]()
За формулою (2.19) визначимо величину швидкості точки
![]() ,
,
![]() .
(2.44)
.
(2.44)
Отже,
швидкість точки тіла, яке обертається навколо нерухомої осі, за величиною дорівнює добутку кутової швидкості на відстань точки до осі обертання.
Вектор
швидкості точки напрямлений по дотичній
до траєкторії, в даному випадку до кола,
що описується точкою
,
в бік обертання. Оскільки дотична до
кола перпендикулярна до його радіуса,
котрий проведений в точку дотику, то
вектор швидкості точки буде перпендикулярним
до її радіуса обертання (![]() рис. 101). Зауважимо, що швидкість точки
тіла, яке обертається, часто називають
обертальною швидкістю, а (2.44) – формула,
що визначає величину обертальної
швидкості.
рис. 101). Зауважимо, що швидкість точки
тіла, яке обертається, часто називають
обертальною швидкістю, а (2.44) – формула,
що визначає величину обертальної
швидкості.
За
формулами (2.25), (2.22), (2.24), які визначають
пришвидшення точки в натуральному
способі задання її руху, визначимо
пришвидшення точки
![]()
Отже,
пришвидшення точки тіла, яке обертається нав-коло нерухомої осі, дорівнює геометричній сумі її нормального і тангенціального пришвидшень
![]() (2.45)
(2.45)
Виразимо
складові пришвидшення через кінематичні
характеристики обертального руху тіла,
тобто через
і
![]() .
Маючи на увазі, що радіус кривизни
траєкторії точки при русі її
по колу дорівнює радіусу цього кола, з
формули нормального
пришвидшення
.
Маючи на увазі, що радіус кривизни
траєкторії точки при русі її
по колу дорівнює радіусу цього кола, з
формули нормального
пришвидшення
![]() ,
використовуючи
формулу (2.44), отримуємо
,
використовуючи
формулу (2.44), отримуємо
![]() ,
,
![]() .
(2.46)
.
(2.46)
Нормальне пришвидшення точки тіла, яке обертається навколо нерухомої осі, дорівнює добутку квадрата кутової швидкості на відстань точки до осі обертання.
З
формули
![]() отримаємо
отримаємо
![]() ,
,
![]() ;
;
![]() . (2.47)
. (2.47)
Отже,
алгебраїчне значення тангенціального пришвидшен-ня точки тіла, яке обертається навколо нерухомої осі, дорівнює добутку алгебраїчного кутового пришвидшення на відстань точки до осі обертання.
Я
Рис. 102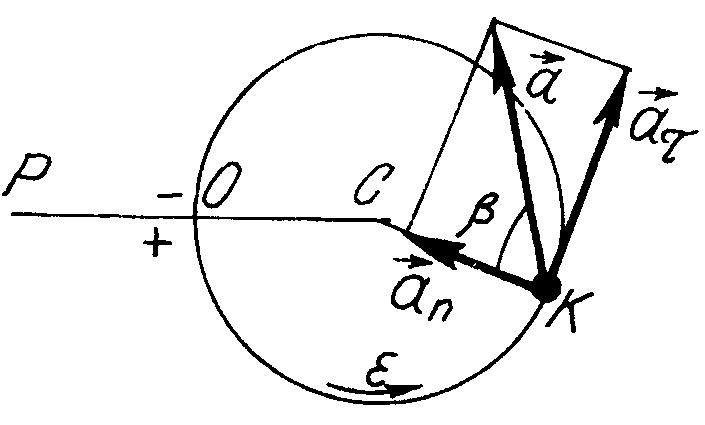
![]() і в протилежний бік, якщо
і в протилежний бік, якщо
![]() .
На рис. 102 вектор
зображений для випадку, коли
.
На рис. 102 вектор
зображений для випадку, коли
![]()
Повне пришвидшення визначається діагоналлю прямокутника, побудованого на тангенціальному і нормальному пришвидшеннях. Його величина вираховується за формулою
![]() .
(2.48)
.
(2.48)
Напрям
вектора повного пришвидшення визначається
кутом нахилу
![]() цього вектора до радіуса. Тангенс цього
кута (рис. 102)
цього вектора до радіуса. Тангенс цього
кута (рис. 102)
![]() (2.49)
(2.49)
З отриманої формули маємо, що кут нахилу до радіуса кола вектора повного пришвидшення точки тіла, яке обертається навколо нерухомої осі, не залежить від положення точки, яке визначається її радіусом, і для всіх точок він має одне і те ж значення.
Я
Рис. 103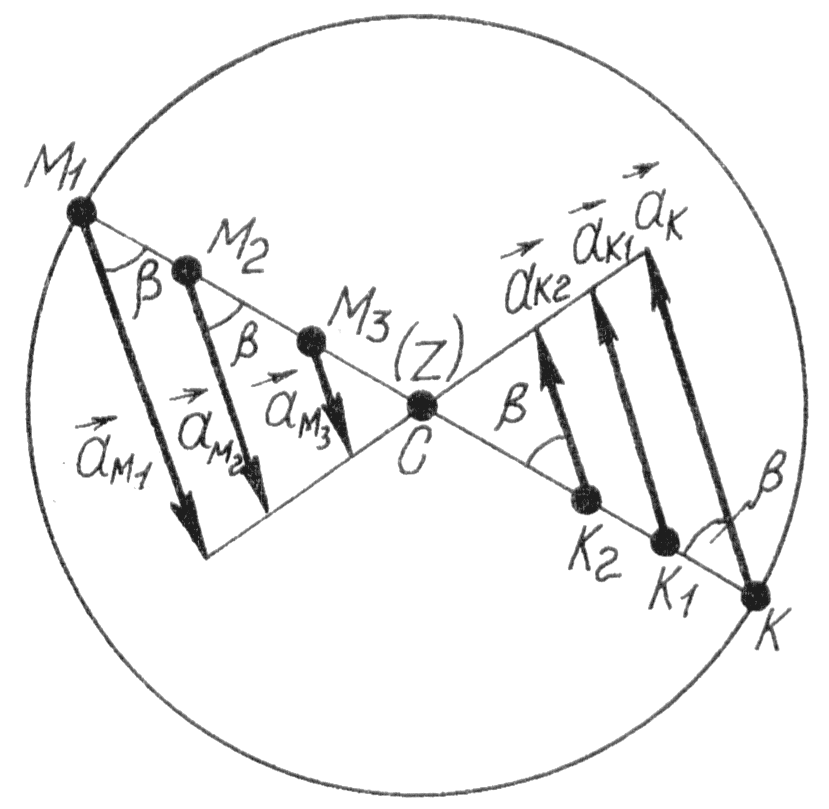
Формули (2.44)-(2.47) визначають вектор пришвидшення точки тіла, яке обертається навколо нерухомої осі
Примітка.
Часто нормальне пришвидшення точок
тіла, яке обертається навколо нерухомої
осі, називають доцентровим і позначають
![]() (в російській літературі
(в російській літературі
![]() – центро-
стремительное ускорение),
а тангенціальне пришвидшення називають
обертальним пришвидшенням і позначають
– центро-
стремительное ускорение),
а тангенціальне пришвидшення називають
обертальним пришвидшенням і позначають
![]() (в російській літературі
(в російській літературі
![]() – вращательное ускорение). При таких
позначеннях формула (2.44) набуває вигляду
– вращательное ускорение). При таких
позначеннях формула (2.44) набуває вигляду
![]() (2.49,
а)
(2.49,
а)
і читається так:
пришвидшення точок тіла, яке обертається нав-коло нерухомої осі, дорівнює геометричній сумі її доцентрового і обертального пришвидшень.