

1.2 Теорія моменту сил
Практика підказує, що коли силу прикласти до твердого тіла, котре має закріплену точку або вісь обертання, то під дією даної сили тіло почне обертатись. Обертальна дія сили на тіло характеризується її моментом, а тому введемо нові поняття: момент сили відносно точки, момент сили відносно осі.
§ 10 Момент сили відносно точки
Нехай нам задано силу , яка прикладена в точці , і якась інша точка , котра не знаходиться на лінії дії сили (рис. 21, а).
Введемо поняття алгебраїчного і векторного моменту сили відносно точки .
Алгебраїчним моментом сили відносно точки назива-ється добуток, взятий з відповідним знаком, модуля сили на її плече.
Плече
сили
– це довжина перпендикуляра, опущеного
з точки
на лінію дії сили. Плечем заданої сили
відносно точки
буде відстань
![]() – довжина перпендикуляра
– довжина перпендикуляра
![]() (рис. 21, б).
(рис. 21, б).
Якщо
позначити момент сили
відносно точки
![]() ,
то згідно з визначенням і рис. 21, б маємо
,
то згідно з визначенням і рис. 21, б маємо
![]() .
(1.13)
.
(1.13)
Формула (1.13) визначає момент сили відносно точки. Як в даній формулі вибираються знаки? Кожна наука цей знак вибирає по-своєму. В теоретичній механіці прийнято, що знак “+” береться в тому випадку, коли з боку спостерігача видно, що сила намагається повернути тіло проти руху годинникової стрілки. В протилежному випадку береться знак “–“. Так (див. рис. 21, в),
![]() ,
,
![]() .
.
З
формули (1.13) видно, що
![]() у випадку, коли
у випадку, коли
![]() ,
а це можливо тільки тоді, коли точка
знаходиться на лінії дії сили. Отже,
якщо
лінія дії сили проходить через точку,
то момент заданої сили відносно цієї
точки дорівнює нулеві.
,
а це можливо тільки тоді, коли точка
знаходиться на лінії дії сили. Отже,
якщо
лінія дії сили проходить через точку,
то момент заданої сили відносно цієї
точки дорівнює нулеві.
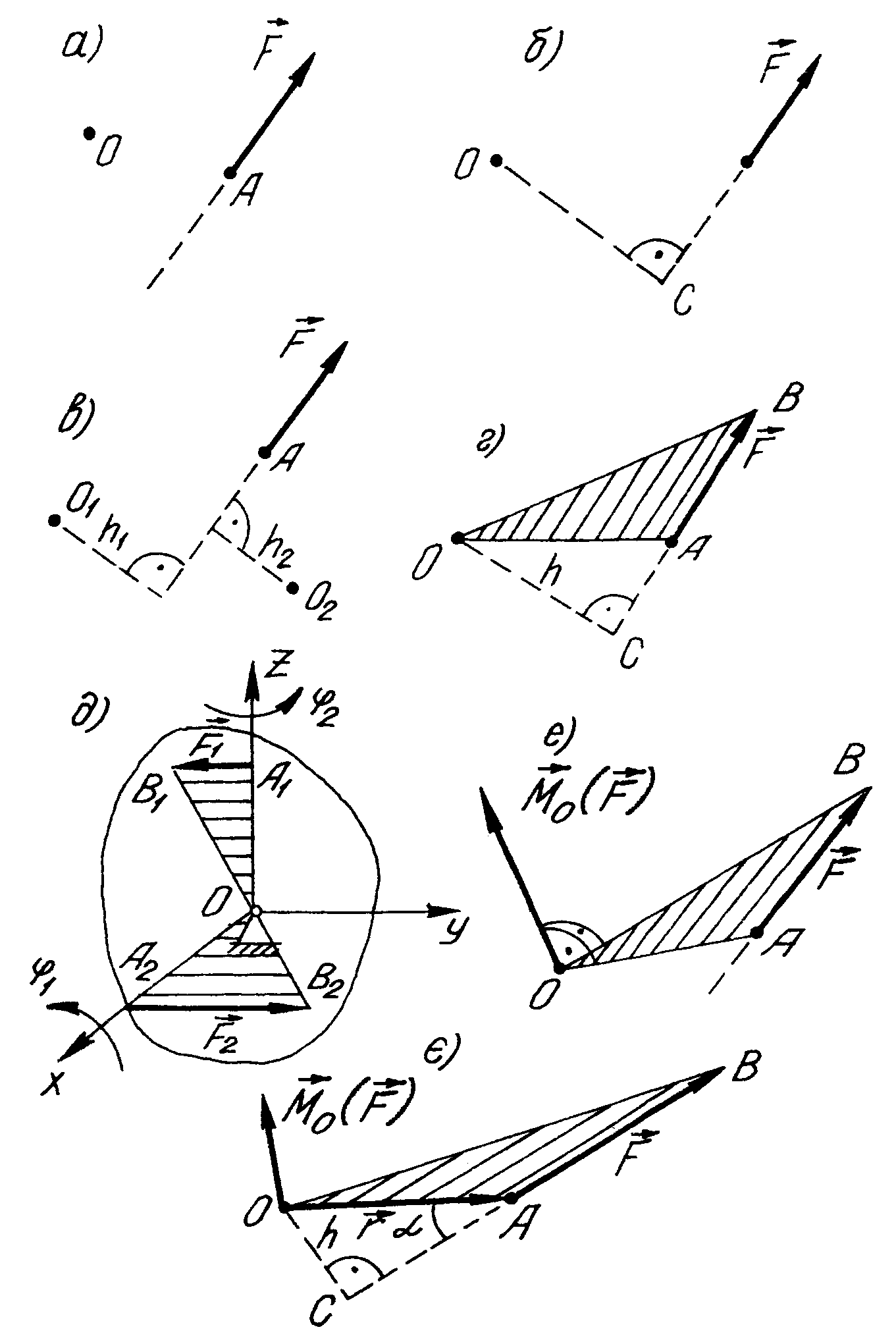
Рис. 21
З’єднаємо
точку
з початком і кінцем вектора сили
.
Отримаємо трикутник
![]() .
Оскільки
.
Оскільки
![]() ,
а
,
а
![]() ,
то
,
то
![]() .
Отже,
.
Отже,
момент сили відносно точки чисельно дорівнює подвійній площі трикутника, вершинами якого є точка і початок та кінець сили
![]() .
(1.14)
.
(1.14)
Формула (1.13), яка визначає момент сили відносно точки, має суттєвий недолік – вона не враховує положення площини трикутника (рис. 21, г), від якого залежить обертальна дія сили. Адже, як показує детальний аналіз, під дією сили (рис. 21, д) тіло фактично намагається повернутись навколо осі, яка перпендикулярна до площини, що проходить через силу і точку. Отже, щоб повністю охарактеризувати дію сили на тверде тіло, яке має закріплену точку, бажано для визначення моменту сили відносно точки мати формулу, яка враховувала б величину сили, її плече (це враховує формула 1.13) і яка вказувала б вісь, навколо якої намагається повернутися тіло.
А тому введемо поняття векторного моменту (вектор-моменту) сили відносно точки.
Векторний момент сили відносно точки – це вектор, перпендикулярний до площини, котра проходить через силу і точку, і напрямлений в бік, звідки видно, що сила намагається повернути тіло проти руху годинникової стрілки (рис. 21, е).
Величина цього вектора дорівнює
![]() .
.
Легко
отримати формулу, яка визначає вектор
моменту сили
відносно точки. Для цього проведемо
вектор
![]() (див. рис. 21, є) з центра
в точку
,
в якій прикладено силу
.
Цей вектор, який визначає положення
однієї точки відносно другої, надалі
будемо називати радіус-вектором. З
трикутника
(див. рис. 21, є) з центра
в точку
,
в якій прикладено силу
.
Цей вектор, який визначає положення
однієї точки відносно другої, надалі
будемо називати радіус-вектором. З
трикутника
![]() (рис. 21, є) видно, що
(рис. 21, є) видно, що
![]() .
.
Тоді
![]() .
(а)
.
(а)
Враховуючи,
що
![]() і
і
![]() – модулі відповідних векторів, а
– модулі відповідних векторів, а
![]() – кут між ними, формула (а) визначає
модуль векторного добутку векторів
і
,
тобто
– кут між ними, формула (а) визначає
модуль векторного добутку векторів
і
,
тобто
![]() .
(б)
.
(б)
Порядок перемноження векторів у формулі (б) вибрано на основі властивостей векторного добутку. Відкинувши в формулі (б) модуль, отримаємо формулу, яка визначає вектор моменту сили відносно точки і враховує всі фактори, від яких залежить обертальна дія сили: величину сили, її точку прикладання, положення сили відносно точки
![]() .
(1.15)
.
(1.15)
Отже,
вектор моменту сили відносно точки (центра) геометрично дорівнює векторному добутку радіуса-вектора точки прикладання сили відносно центра на вектор сили.
Алгебраїчним моментом сили відносно точки користуються при дії на механічну систему плоскої системи сил, векторним – у випадку дії просторової системи сил.