

Питання для самоконтролю
1. Що називається моментом сили відносно точки?
2. Запишіть формулу, за допомогою якої визначається алгебраїчний момент сили відносно точки.
3. Чому прийнято момент сили відносно точки вважати вектором?
4. Який напрям має вектор моменту сили відносно точки?
5. Запишіть формулу, яка визначає вектор моменту сили відносно точки.
6.
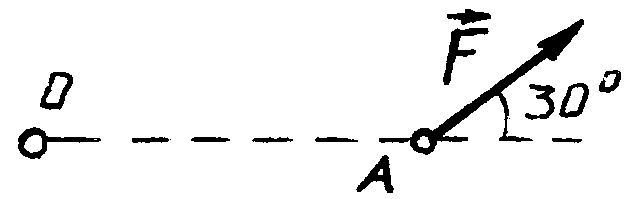
Визначіть момент сили
відносно точки
,
якщо
Н,
![]() м.
(рис. А).
м.
(рис. А).
7. Що називається моментом сили відносно осі?
Рис. А |
Рис. Б |
8. Запишіть формулу, за допомогою якої визначається момент сили відносно осі.
9. В яких випадках момент сили відносно осі дорівнює нулеві?
10. Як графічно зобразити момент сили відносно осі?
11.
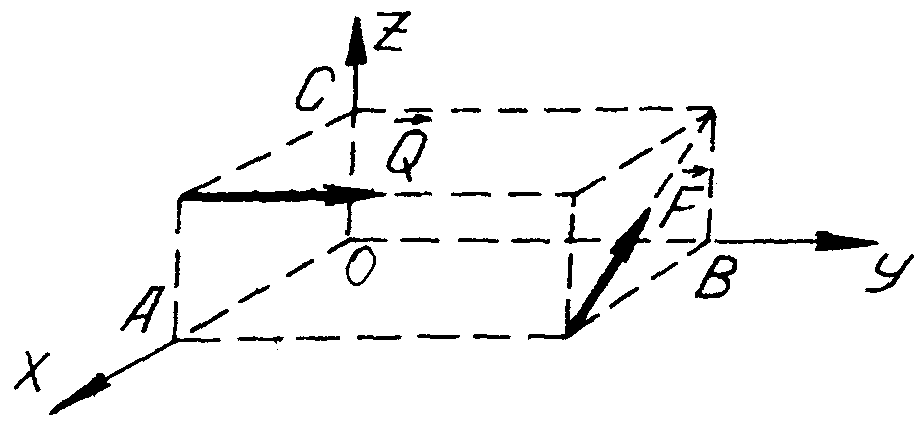
Визначіть моменти сил
і
відносно координатних осей, якщо
![]() кН,
кН,
![]() кН,
кН,
![]() м,
м,
![]() м,
м,
![]() м.
(рис. Б).
м.
(рис. Б).
12. Запишіть формулу, яка відображає залежність між моментом сили відносно точки і моментом сили відносно осі, що проходить через задану точку.
13.
Визначіть величину моменту сили
![]() відносно початку осей координат, якщо
задана сила прикладена в точці
відносно початку осей координат, якщо
задана сила прикладена в точці
![]() .
Проекції сили на координатні осі задані
в Ньютонах, а координати точки В
– в метрах.
.
Проекції сили на координатні осі задані
в Ньютонах, а координати точки В
– в метрах.
1.3 Довільна система сил
Перш ніж приступити до розв’язання основних задач теоретичного курсу статики для довільної системи сил введемо додаткові поняття.
§ 15 Головний вектор і головний момент системи сил
Поняття головного вектора і головного моменту системи сил є одним з основних понять теоретичної механіки. Це пояснюється, як Ви переконаєтесь в процесі вивчання теоретичного курсу, тим, що дія системи сил на тверде тіло визначається значенням її головного вектора і головного моменту.
Нехай
задано довільну систему сил
![]() ,
які прикладені відповідно в точках
,
які прикладені відповідно в точках
![]() (рис. 28, а).
(рис. 28, а).
Головним
вектором
![]() системи
сил
називається геометрична сума всіх сил
системи
системи
сил
називається геометрична сума всіх сил
системи
![]() .
(1.26)
.
(1.26)
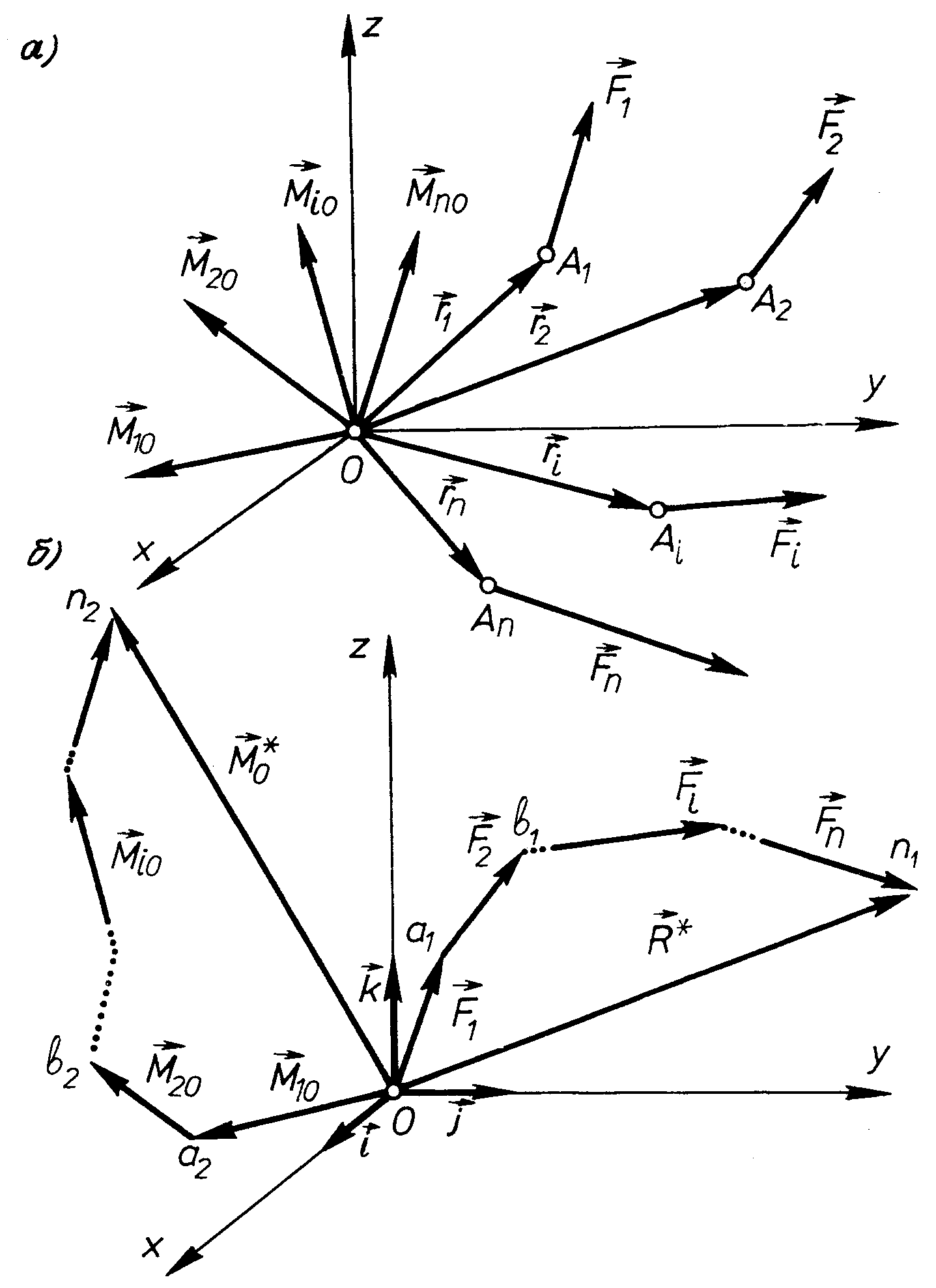
Рис. 28
До
точок прикладання сил з центра
проведемо радіус-вектори
![]() (рис. 28, а) і за формулою (1.13) визначимо
момент кожної сили відносно центра
.
(рис. 28, а) і за формулою (1.13) визначимо
момент кожної сили відносно центра
.
Головним
моментом
![]() системи
сил відносно довільної точки називається
геометрична сума векторних моментів
всіх сил системи відносно даної точки
системи
сил відносно довільної точки називається
геометрична сума векторних моментів
всіх сил системи відносно даної точки
![]() .
(1.27)
.
(1.27)
На основі формул (1.26–1.27) можна вказати два способи визначення головного вектора і головного моменту системи сил.
1. Геометричний спосіб
Щоб
геометрично визначити головний вектор,
необхідно векторно скласти всі сили
системи, тобто побудувати силовий
багатокутник
![]() (рис. 28, б). Замикаюча сторона силово-го
багатокутника, напрямлена проти його
обходу, визначає як величину,
так і напрям головного вектора заданої
системи сил.
(рис. 28, б). Замикаюча сторона силово-го
багатокутника, напрямлена проти його
обходу, визначає як величину,
так і напрям головного вектора заданої
системи сил.
Аналогічно
визначається і головний момент системи
сил. Тільки тут будується багатокутник
моментів
![]() (рис. 28, в).
(рис. 28, в).
2. Аналітичний спосіб
Спроектувавши векторні рівності (1.26, 1.27) на декартові осі координат, отримаємо
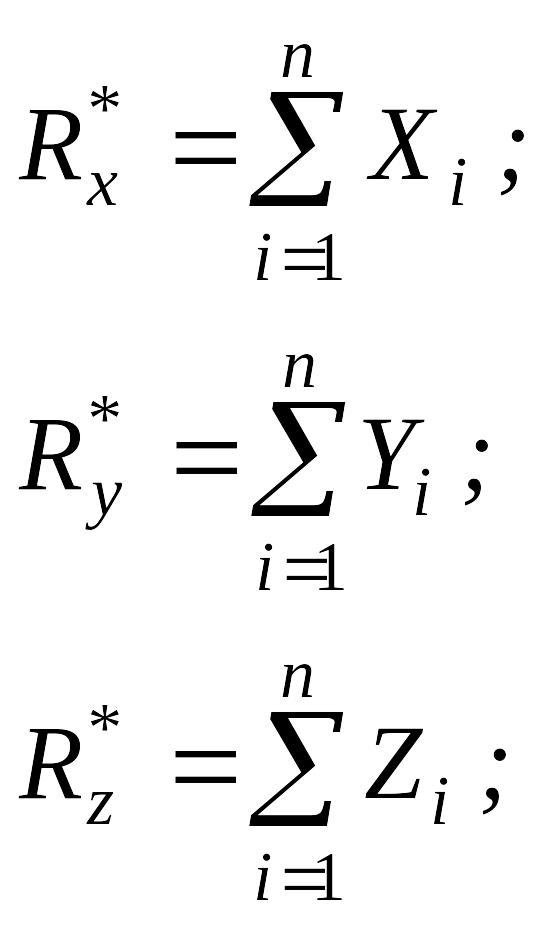 (1.28)
(1.28)  (1.29)
(1.29)
Формули
(1.28) визначають проекції головного
вектора на декартові осі координат. В
цих формулах
![]() – проекції вектора
-ої
сили системи на дані осі координат.
– проекції вектора
-ої
сили системи на дані осі координат.
Формули
(1.29) визначають проекції головного
моменту системи сил на декартові осі
координат. В даних формулах
![]() – проекції вектора моменту
-ої
сили системи на дані осі. Якщо головний
момент системи визначено відносно
початку координат, як це було зроблено
за формулою (1.29), то відповідно до формули
(1.18) можна сказати, що
– проекції вектора моменту
-ої
сили системи на дані осі. Якщо головний
момент системи визначено відносно
початку координат, як це було зроблено
за формулою (1.29), то відповідно до формули
(1.18) можна сказати, що
![]() – це головні моменти відносно координатних
осей, а
– це моменти сили
відносно координатних осей.
– це головні моменти відносно координатних
осей, а
– це моменти сили
відносно координатних осей.
Знаючи проекції, знаходимо модуль головного вектора
![]() (1.30)
(1.30)
і головного моменту
![]() ,
(1.31)
,
(1.31)
а також напрямні косинуси
 (1.32)
(1.32)  (1.33)
(1.33)
Формули (1.28), (1.30), (1.32) аналітично визначають головний вектор системи сил, а формули (1.29), (1.31), (1.33) – головний момент системи сил відносно точки .