

§ 25 Статично означені і статично неозначені задачі
Задачі на рівновагу механічних систем, які розв’язу-ються методами статики твердого тіла, називають-ся статично означеними. В протилежному разі задачі статично неозначені.
Механічні системи, яких це стосується, називаються відповідно статично визначеними і статично невизначеними.
Що означає розв’язати задачу? Розв’язати задачу означає визначити певну кількість невідомих величин. Позначимо К – число невідомих в задачі.
Задачі
на рівновагу тіл в статиці розв’язуються
методом складання незалежних рівнянь
рівноваги. Як відомо з попереднього,
кожна система сил має свою кількість
умов рівноваги. Позначимо
![]() – число незалежних рівнянь рівноваги,
які можна скласти для даної системи
сил.
– число незалежних рівнянь рівноваги,
які можна скласти для даної системи
сил.
Очевидно, задача буде статично означеною, якщо
![]() (1.56)
(1.56)
Нерівність (1.56) – це умова статичної означеності задачі. Для різних систем сил ця умова виглядає так:
1.
Плоска система збіжних сил
![]() ;
;
2. Плоска система паралельних сил ;
3.
Довільна плоска система сил
![]() ;
;
4.
Довільна просторова система сил
![]() ;
;
5. Просторова система паралельних сил ;
6.
Просторова система збіжних сил
![]() .
.
Як приклад, розглянемо задачу на визначення реакцій в’язей, які накладені на балку АВ, в двох варіантах її закріплення (рис. 55 і 56).
В першому варіанті (рис. 55, а) балка АВ прикріплена до горизонтальної поверхні нерухомим шарніром А і рухомим
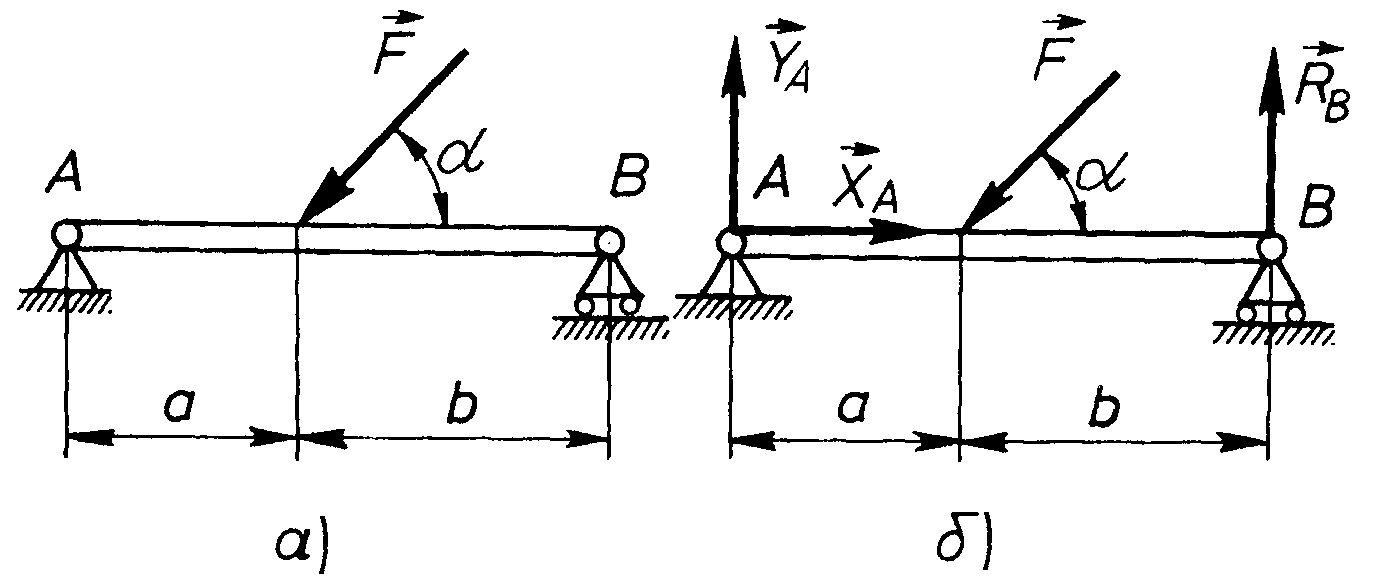
Рис. 55
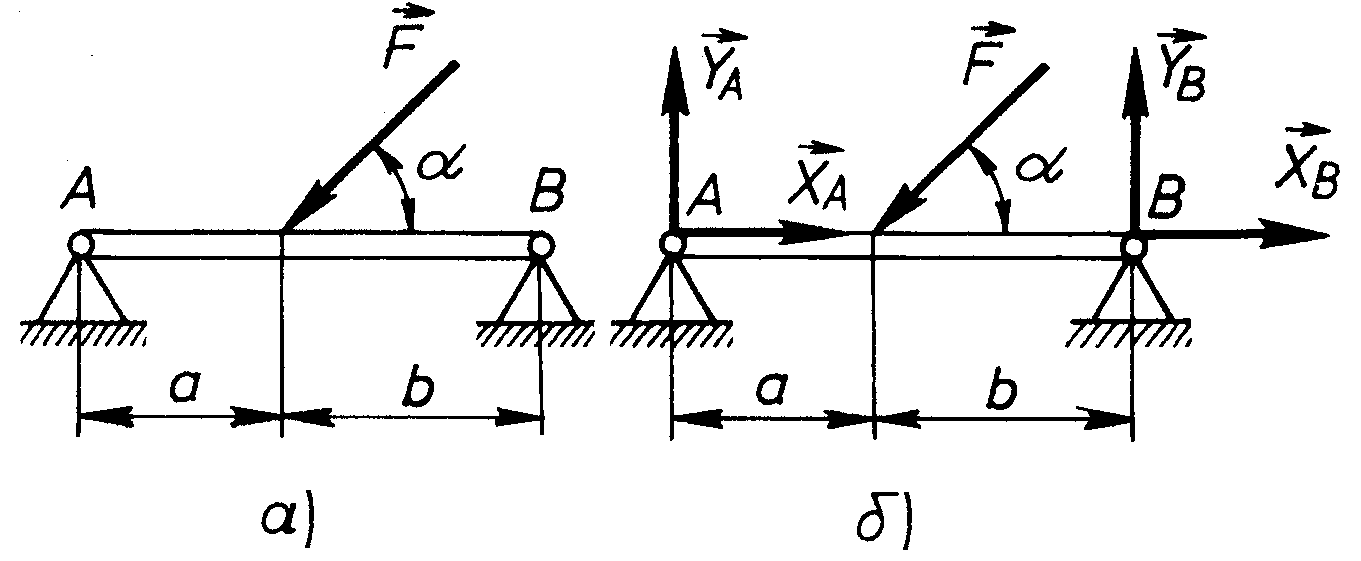
Рис. 56
шарніром
В.
Оскільки реакція нерухомого циліндричного
шарніра має дві складові
![]() а реакція рухомої опори
а реакція рухомої опори
![]() перпендикулярна до опорної поверхні,
то в даному варіанті закріплення балки
маємо три невідомі:
перпендикулярна до опорної поверхні,
то в даному варіанті закріплення балки
маємо три невідомі:
![]() На балку діє плоска система сил, для
якої можна скласти три незалежних
рівняння рівноваги, отже,
На балку діє плоска система сил, для
якої можна скласти три незалежних
рівняння рівноваги, отже,
![]() тобто задача є статично означеною.
тобто задача є статично означеною.
Якщо
балку АВ
прикріпити
до горизонтальної поверхні двома
нерухомими шарнірами (рис. 56, а), то задача
буде статично
неозначеною, оскільки число невідомих
![]() дорівнює чотирьом
дорівнює чотирьом
![]() ,
а для плоскої системи сил, яка діє на
балку, можна скласти тільки три незалежних
рівняння рівноваги, тобто кількість
рівнянь рівноваги, які дає статика, є
недостатньою для однозначного визначення
всіх реакцій опор. Для розв’язання
такої задачі необхідно враховувати
пружні властивості тіла АВ, його
деформацію, що не входить до компетенції
теоретичної механіки. Такі задачі будуть
розв’язува-тися в “Опорі матеріалів”.
,
а для плоскої системи сил, яка діє на
балку, можна скласти тільки три незалежних
рівняння рівноваги, тобто кількість
рівнянь рівноваги, які дає статика, є
недостатньою для однозначного визначення
всіх реакцій опор. Для розв’язання
такої задачі необхідно враховувати
пружні властивості тіла АВ, його
деформацію, що не входить до компетенції
теоретичної механіки. Такі задачі будуть
розв’язува-тися в “Опорі матеріалів”.
Умова статичної означеності задачі (умова 1.56) значно розширюється для систем тіл, що з’єднані між собою і перебувають в рівновазі.
§ 26 Рівновага системи тіл
Розглянемо рівновагу системи тіл, які з’єднані між собою за допомогою шарнірів, гнучких ланок (наприклад, тросів) або вільно спираються одне на одного.
Сили, які діють на таку систему, можна поділити на зовнішні і внутрішні.
Зовнішніми силами називаються сили, з якими тіла системи взаємодіють з тілами, що не входять в дану систему.
Внутрішні сили – це сили взаємодії між тілами однієї і тієї ж системи.
Т
Рис. 57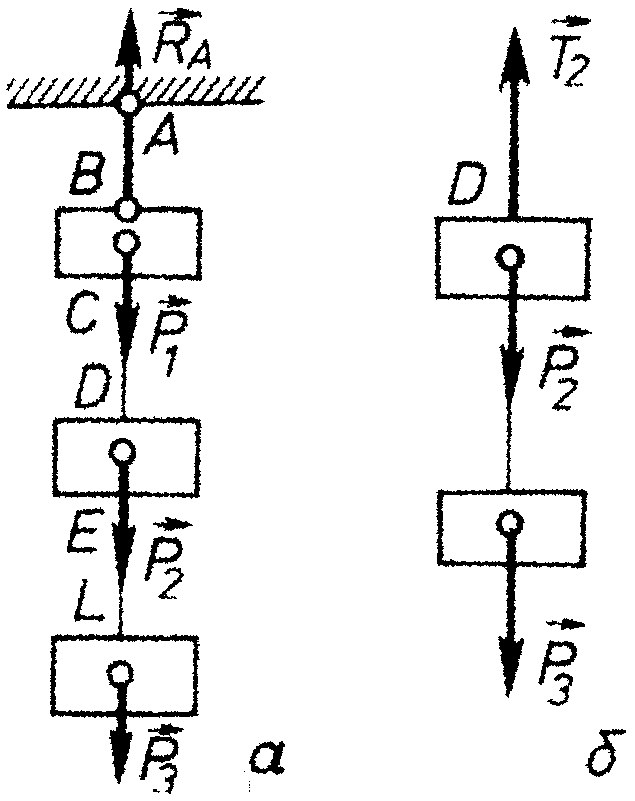
![]() – реакція
точки підвісу;
– реакція
точки підвісу;
![]() – сили ваги
вантажів. Натяги ниток
– сили ваги
вантажів. Натяги ниток
![]() на ділянках АВ,
CD, EL
утворюють систему внутрішніх сил.
на ділянках АВ,
CD, EL
утворюють систему внутрішніх сил.
Якщо
нитку CD
розрізати і розглянути систему двох
вантажів (рис. 57, б), то для даної системи
зовнішніми силами будуть:
![]() – сили ваги вантажів;
– сили ваги вантажів;
![]() – натяг нитки CD.
Отже,
сила
,
яка для системи трьох вантажів (рис. 57,
а) була
внутрішньою,
для системи двох вантажів (рис. 57, б)
стала зов-нішньою.
Другий приклад: сила ваги тіла відносно
самого тіла є зовнішньою силою; якщо
розглянути систему тіло – Земля, то для
даної системи сила ваги тіла буде
внутрішньою силою.
– натяг нитки CD.
Отже,
сила
,
яка для системи трьох вантажів (рис. 57,
а) була
внутрішньою,
для системи двох вантажів (рис. 57, б)
стала зов-нішньою.
Другий приклад: сила ваги тіла відносно
самого тіла є зовнішньою силою; якщо
розглянути систему тіло – Земля, то для
даної системи сила ваги тіла буде
внутрішньою силою.
З наведених прикладів видно, що поділ сил на зовнішні і внутрішні, як було сказано вище, є відносним. Але при розв’язанні кожної задачі такий поділ необхідно чітко проводити, бо внутрішні сили, які прикладені до точок однієї і тієї ж системи (враховуючи, що сили, згідно з законом дії і протидії, виникають попарно) взаємно зрівноважуються.
До того ж з наведеного видно, що внутрішні сили деякої системи тіл можна перевести в зовнішні відносно нової системи, яка є складовою частиною даної системи тіл і отримується в результаті ділення заданої системи тіл. Метод “переве-дення” внутрішніх сил у зовнішні в механіці називається методом перерізів.
Застосовуючи
метод перерізів і враховуючи те, що коли
система тіл знаходиться в рівновазі,
то кожне тіло даної системи перебуває
також в рівновазі; кількість незалежних
рівнянь рівноваги, які можна скласти
для системи
тіл буде дорівнювати
![]() ,
і задача буде статично означеною, якщо
,
і задача буде статично означеною, якщо
![]() (1.57)
(1.57)
Нерівність (1.57) — це умова статичної означеності задачі для системи тіл, які перебувають в рівновазі. Так, наприклад, якщо система складається з двох тіл, і на кожне тіло діє довільна плоска система сил, то умова (1.57) набуває вигляду
![]() .
.
Примітки:
1. Умова (1.57) справедлива у випадку, коли на тіла системи діють однотипні системи сил. Якщо на тіла системи діють різнотипні системи сил, то умова (1.57) набуває вигляду
![]() ,
(1.58)
,
(1.58)
де
![]() – кількість незалежних рівнянь рівноваги,
які можна скласти для системи сил, що
діє на і-те
тіло.
– кількість незалежних рівнянь рівноваги,
які можна скласти для системи сил, що
діє на і-те
тіло.
2. Число К включає в себе невідомі реакції в’язей, внутрішні зусилля в точках з’єднання тіл, невідомі активні сили і геометричні параметри (відстані, кути і т.ін.).
3. Задачі на рівновагу системи тіл можна розв’язувати двома методами:
3.1.
З самого початку розглядається рівновага
системи тіл, а пізніше, якщо необхідно,
застосовуючи метод перерізів, розглядається
рівновага
![]() тіла заданої системи і складається
необхідна кількість рівнянь рівноваги.
тіла заданої системи і складається
необхідна кількість рівнянь рівноваги.
3.2. Застосовуючи метод перерізів, розглядається рівновага кожного тіла системи і складається відповідна кількість рівнянь рівноваги.
Яким методом користуватись? Обидва методи є рівноправними. Тільки можна порекомендувати, якщо в задачі не вимагається визначення зусиль в з’єднувальних елементах системи, то більш ефективним методом розв’язання задачі буде перший метод. Оскільки, розглядаючи рівновагу всієї конст-рукції, в рівняння рівноваги не будуть входити зусилля у з’єд-нувальних елементах, бо вони є внутрішніми силами, невиста-чаючу кількість рівнянь рівноваги отримують шляхом розглядання рівноваги окремих тіл системи і складанням таких рівнянь рівноваги, які не включали б нових, непотрібних для визначення невідомих.
Задача.
Два однорідних стрижні однакової довжини
з’єднані шарнірно в точці С
і шарнірно прикріплені в точках А
і В.
Вага кожного стрижня
![]() В точці С
до стрижня підвішено
вантаж
В точці С
до стрижня підвішено
вантаж
![]() Відстань АВ
= а
= 1,2 м. Відстань
шарніра С до горизонтальної прямої АВ
дорівнює
Відстань АВ
= а
= 1,2 м. Відстань
шарніра С до горизонтальної прямої АВ
дорівнює
![]() м. Визначити реакції шарнірів А
і В
(рис. 58, а).
м. Визначити реакції шарнірів А
і В
(рис. 58, а).
Для розв’язання задачі розглянемо рівновагу всієї конструкції, на яку діють (рис. 58, б):
![]() – задані
сили;
– задані
сили;
![]() – реакції
опор, які необхідно визначити.
– реакції
опор, які необхідно визначити.
Діюча система сил є плоскою, рівняннями рівноваги якої є:
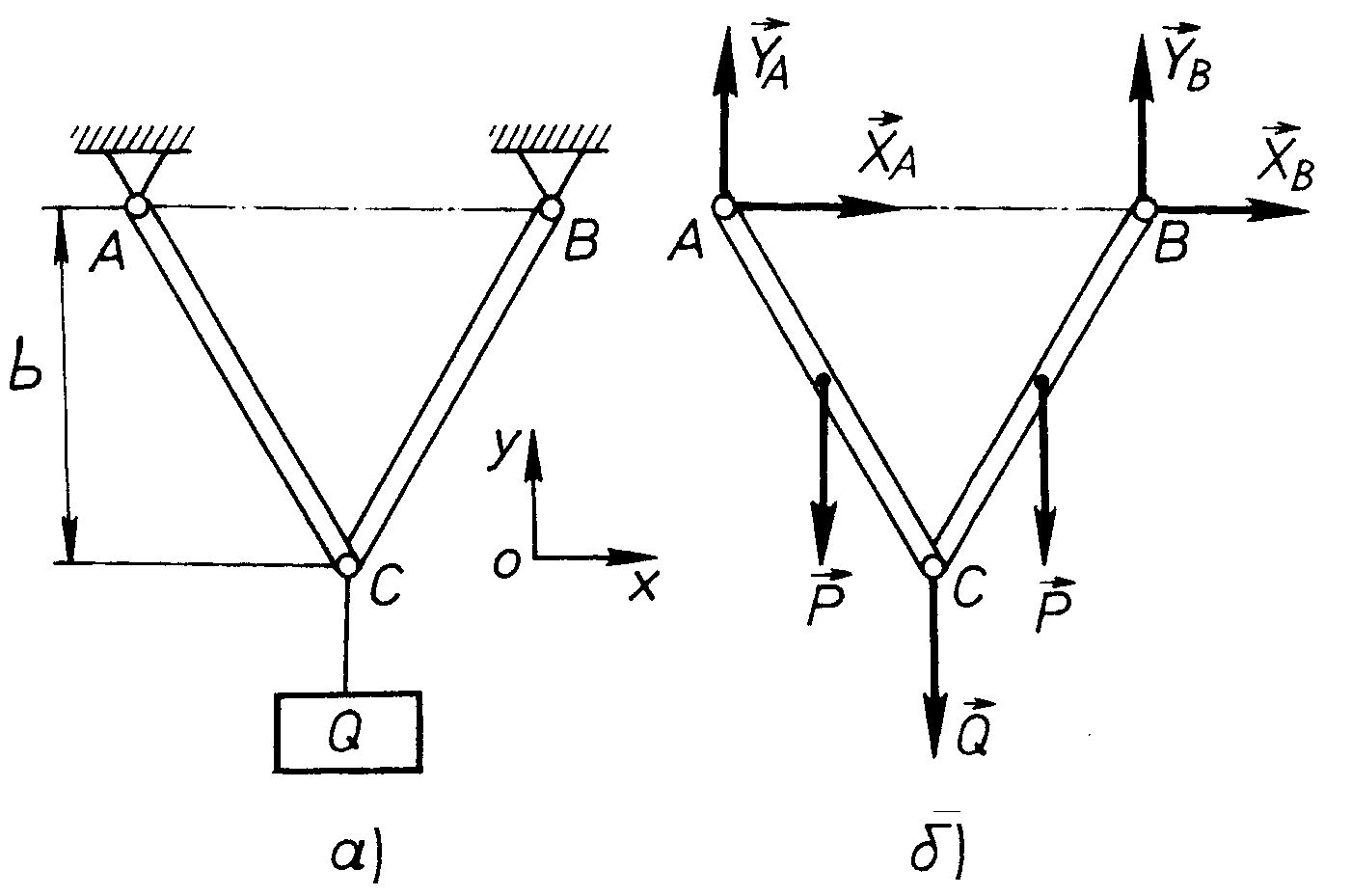
Рис. 58
; ![]() ;
;
; ![]() ;
;
![]() ;
; ![]() .
.
Підставляючи числові значення, маємо
![]()
![]()
![]()
Звідси
![]()
Для
знаходження
![]() і
і
![]() потрібно мати ще рівняння рівноваги.
Для отримання цього рівняння розглянемо
рівновагу стрижня АС,
на який діють (рис. 59)
потрібно мати ще рівняння рівноваги.
Для отримання цього рівняння розглянемо
рівновагу стрижня АС,
на який діють (рис. 59)
![]() – задані сили;
– задані сили;
![]() – реакції в’язей.
– реакції в’язей.
Д
Рис. 59
![]()
Звідси
![]() отже,
отже,
![]()