

§ 49.2 Складання поступального і обертального рухів твердого тіла
Розглянемо складний рух твердого тіла, який складається з поступального і обертального навколо деякої осі. Тут можуть зустрітись такі випадки: вектор швидкості поступального руху є: а) перпендикулярним до осі обертання; б) паралельним до осі обертання; в) утворює з віссю обертання довільний кут. Розглянемо окремо кожний з цих випадків.
а) Швидкість поступального руху перпендикулярна до осі обертання
Прикладом такого руху є рух автомобільних коліс, які рухаються поступально разом з автомобілем і одночасно обертаються навколо відповідних осей, до того ж в кожний момент часу швидкість поступального руху перпендикулярна до осі обертання колеса.
Припустимо,
що тіло
обертається з кутовою швидкістю
навколо осі
,
яка жорстко скріплена з іншим тілом
(наприклад, з площиною
),
яке рухається поступально зі швидкістю
![]() ,
перпендикулярною до осі
(рис. 146). Для визначення результуючого
руху на осі
візьмемо довільну точку
,
перпендикулярною до осі
(рис. 146). Для визначення результуючого
руху на осі
візьмемо довільну точку
![]() ,
через яку проведемо осі
,
через яку проведемо осі
![]() і
і
![]() ,
причому вісь
проведемо паралельно до вектора
.
На осі
візьмемо точку
на відстані
,
причому вісь
проведемо паралельно до вектора
.
На осі
візьмемо точку
на відстані
![]() (а)
(а)
і визначимо її швидкість. Тіло здійснює складний рух, отже кожна його точка здійснює складний рух, а це означає, що швидкість точки можна обчислити за формулою
![]() .
(б)
.
(б)
За переносний рух приймемо поступальний рух твердого тіла, тоді переносна швидкість кожної точки тіла буде дорівнювати , тобто:
![]() .
(в)
.
(в)
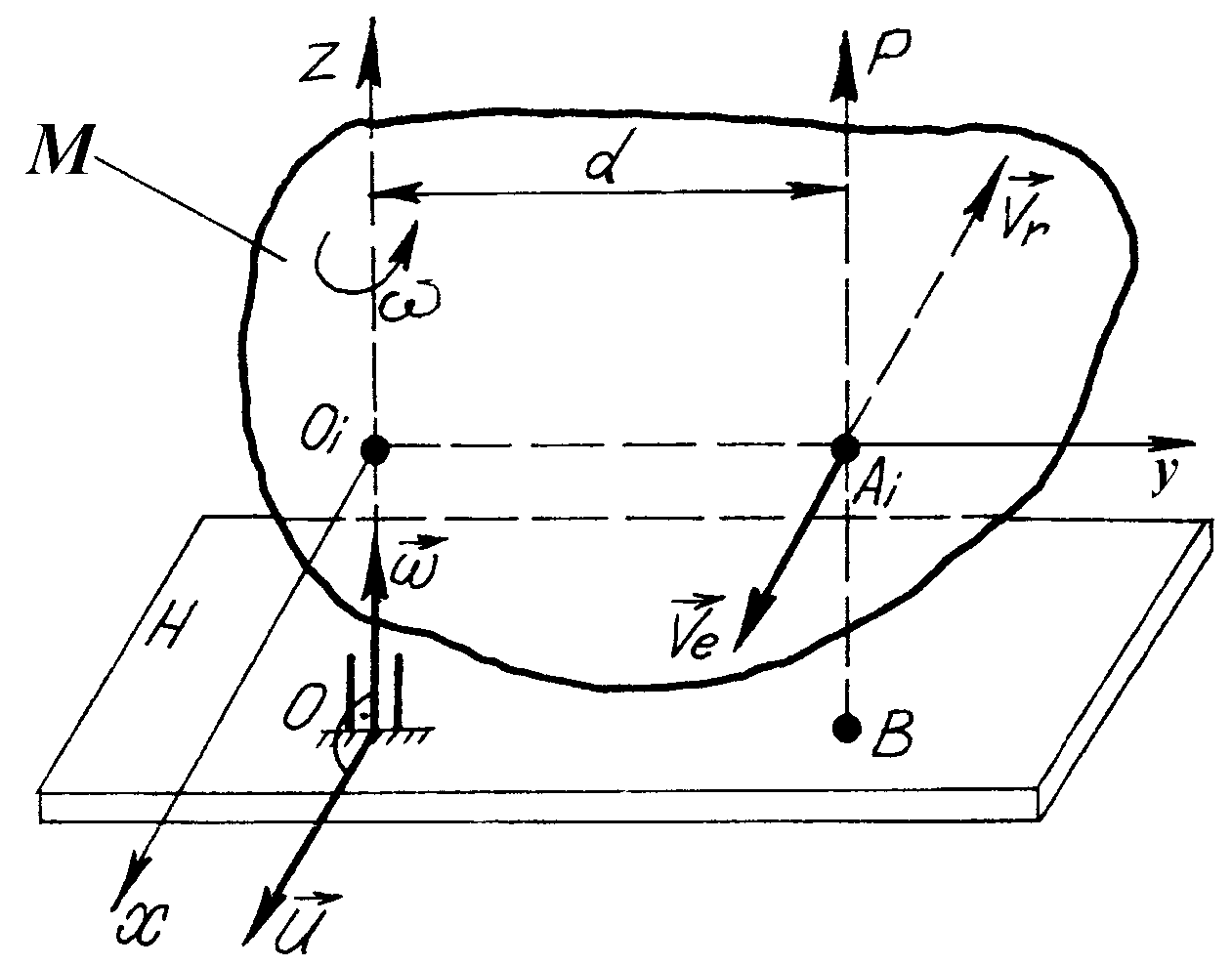
Рис. 146
За відносний рух приймемо обертання твердого тіла навколо осі , тоді величина відносної швидкості кожної точки тіла буде дорівнювати добутку кутової швидкості на відстань даної точки до осі обертання. Для точки , враховуючи співвідношення (а), отримаємо
![]() .
(г)
.
(г)
Вектор
відносної швидкості як вектор обертальної
швидкості буде перпендикулярним до
відповідного радіуса. Для точки
![]() і напрямлений в бік обертання, як вказано
на рис. 146.
і напрямлений в бік обертання, як вказано
на рис. 146.
Підставляючи (в) і (г) у формулу (б) і враховуючи, що вектори і напрямлені по одній прямій в протилежні боки, отримаємо
![]() ,
,
тобто
абсолютна швидкість точки
![]() в даний момент часу дорівнює нулеві.
в даний момент часу дорівнює нулеві.
Якщо
через точку
паралельно до осі
провести вісь
![]() і врахувати, що на осі
точку
вибрано довільно (отже, і точка
є довільною точкою осі
),
то можна зробити такий висновок: вісь
є геометричне місце точок, абсолютні
швидкості яких в даний момент часу
дорівнюють нулеві, тобто вона є миттєвою
віссю абсолютного обертання, а це
означає, що результуючий рух твердого
тіла в даний момент часу є обертальним.
і врахувати, що на осі
точку
вибрано довільно (отже, і точка
є довільною точкою осі
),
то можна зробити такий висновок: вісь
є геометричне місце точок, абсолютні
швидкості яких в даний момент часу
дорівнюють нулеві, тобто вона є миттєвою
віссю абсолютного обертання, а це
означає, що результуючий рух твердого
тіла в даний момент часу є обертальним.
Таким чином,
при складанні поступального і обертального рухів твердого тіла у випадку, коли швидкість поступального руху перпендикулярна до осі обертання, результуючий рух тіла в кожний момент часу є обертальним навколо миттєвої осі обертання, паралельної до осі обертання складового руху, і знаходиться від неї на відстані d, яка визначається за формулою
![]() .
(2.97)
.
(2.97)
Відрізок відкладається вздовж перпендикуляра до площини, яка проходить через вектори і в бік, звідки поворот вектора до на кут видно проти руху годинникової стрілки.
Позначимо
кутову швидкість результуючого
(абсолютною) руху
![]() і визначимо її. Для цього за формулою
і визначимо її. Для цього за формулою
![]() (д)
(д)
визначимо абсолютну швидкість точки . Кожний з векторів які входять в рівність (д), легко обчислити:
![]() ,
адже абсолютний рух, як було тільки що
доведено, є обертальним навколо миттєвої
осі
;
,
адже абсолютний рух, як було тільки що
доведено, є обертальним навколо миттєвої
осі
;
![]() ,
бо переносний рух, як було прийнято, є
поступальним зі швидкістю
;
,
бо переносний рух, як було прийнято, є
поступальним зі швидкістю
;
![]() ,
точка
знаходиться на осі відносного обертання.
,
точка
знаходиться на осі відносного обертання.
Враховуючи все це, з рівності (д) отримаємо
![]() .
.
Звідки, враховуючи формулу (а), матимемо
![]() ,
,
кутова швидкість результуючого (абсолютного) руху дорівнює кутовій швидкості складового обертання.
На закінчення звернемо увагу на те, що цей вид руху тіла є не що інше як плоскопаралельний рух, який, як відомо, визначається рухом плоскої фігури в її площині. Саму плоску фігуру отримаємо шляхом перетину тіла площиною, перпендикулярною до осі . Миттєвий центр швидкостей, навколо якого плоска фігура в даний момент часу здійснює обертальний рух, буде знаходитися в точці її перетину з миттєвою віссю ( ) обертання тіла.
б) Швидкість поступального руху паралельна осі обертання
П
Рис.
147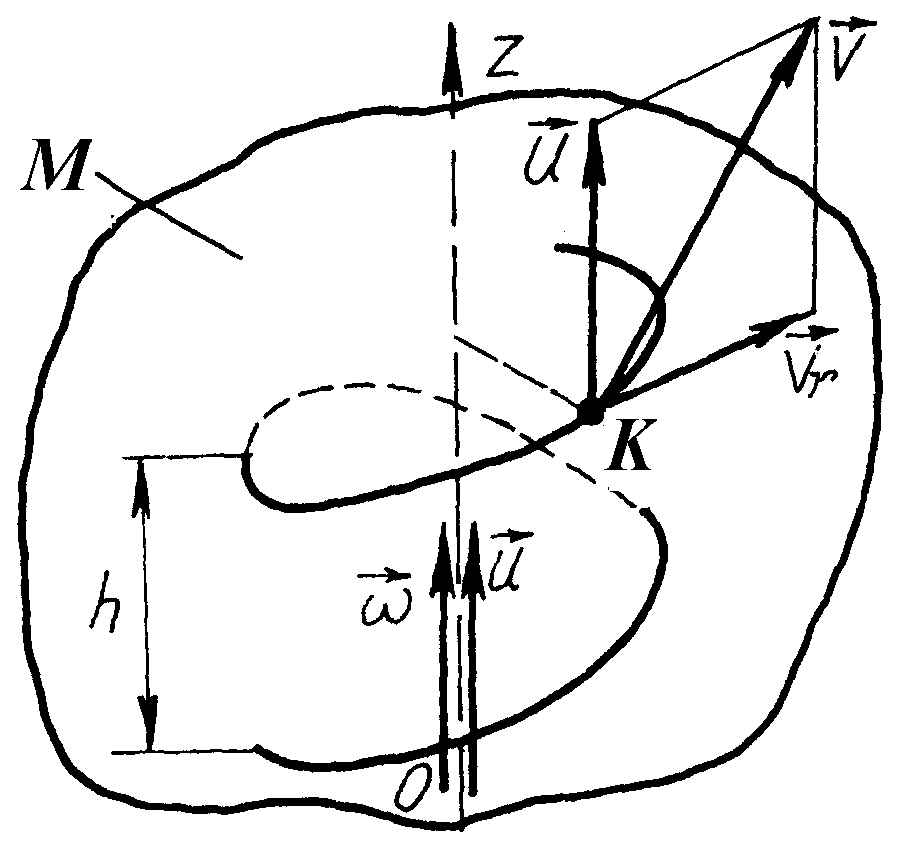
На
рис. 147 зображено тіло
,
яке обертається навколо осі
з кутовою швидкістю
і одночасно рухається зі швидкістю
,
причому
![]() .
Швидкість будь-якої точки
,
яка, як і все тіло, здійснює складний
рух, буде визначатись формулою
.
Швидкість будь-якої точки
,
яка, як і все тіло, здійснює складний
рух, буде визначатись формулою
![]() .
(а)
.
(а)
Прийнявши за переносний рух поступальний рух твердого тіла, а за відносний – його обертання навколо осі , матимемо
![]() ;
;
![]() ,
,
і формула (а) набуває вигляду
![]() .
(б)
.
(б)
Таким
чином, абсолютна швидкість точки може
бути розкладена на дві складові: одна
з них
![]() паралельна до осі
;
інша
паралельна до осі
;
інша
![]() знаходиться в площині, яка перпендикулярна
до осі, до того ж вона перпендикулярна
до площини, яка проходить через вісь
і точку
(рис. 147). Звідси можна зробити висновок,
що точки тіла рухаються по бокових
поверхнях циліндрів з віссю
і радіусом
,
де
– відстань точки до осі
,
а траєкторією їх є гвинтові лінії.
знаходиться в площині, яка перпендикулярна
до осі, до того ж вона перпендикулярна
до площини, яка проходить через вісь
і точку
(рис. 147). Звідси можна зробити висновок,
що точки тіла рухаються по бокових
поверхнях циліндрів з віссю
і радіусом
,
де
– відстань точки до осі
,
а траєкторією їх є гвинтові лінії.
Отже,
при складанні поступального і обертального рухів твердого тіла у випадку, коли швидкість поступального руху паралельна осі обертання, результуючий (абсолютний) рух тіла є гвинтовим, бо його точки описують гвинтові лінії.
Однієї з основних геометричних характеристик гвинта є його крок.
Кроком гвинта називається відстань, яку проходить точка осі гвинта за один оберт тіла.
Точки
осі гвинта рухаються зі швидкістю
.
Припустивши, що
![]() ,
,
отримаємо формулу, яка визначає крок
(
)
кінематичного гвинта
,
,
отримаємо формулу, яка визначає крок
(
)
кінематичного гвинта
![]() .
(2.98)
.
(2.98)
Відношення
![]() (2.99)
(2.99)
називається параметром кінематичного гвинта.
Якщо швидкості і змінні, то, природно, параметри кінематичного гвинта будуть змінними.
в) Швидкість поступального руху утворює довільний кут з віссю обертання
Н
Рис.
148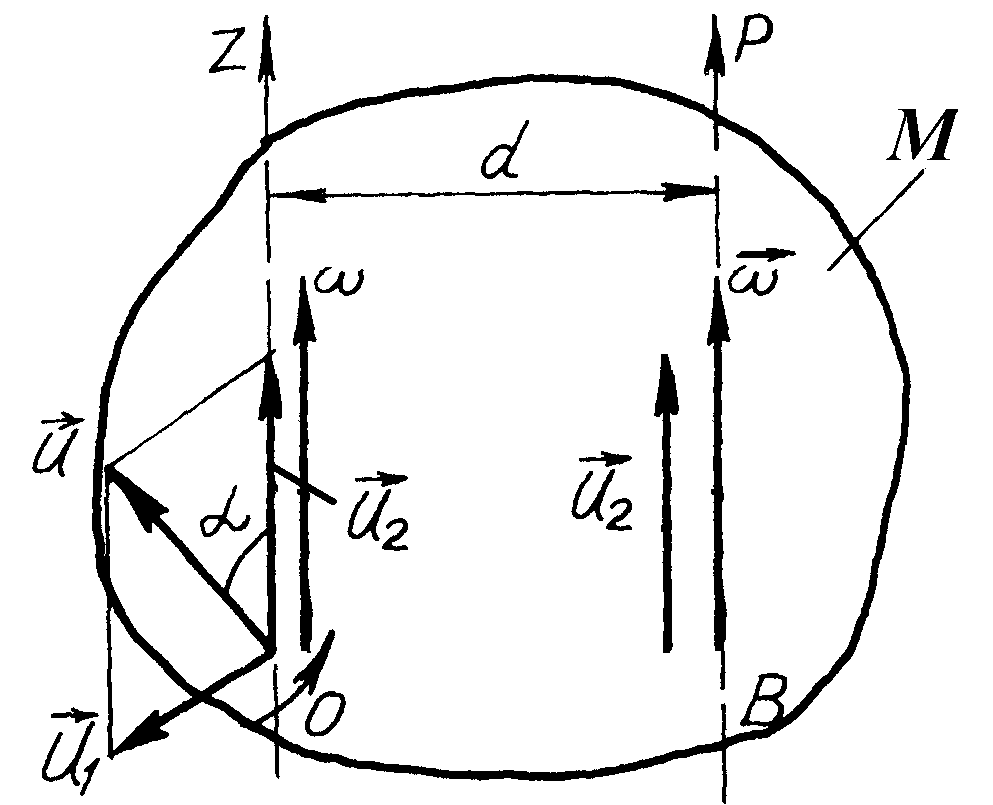
![]() ,
,
одна
з яких
![]() перпендикулярна до осі
,
причому
перпендикулярна до осі
,
причому
![]() ,
,
інша
![]() – паралельна до осі
.
– паралельна до осі
.
![]() .
.
Застосовуючи
принцип незалежності рухів і склавши
поступальний рух з швидкістю
![]() з обертанням навколо осі
,
отримаємо, згідно з пунктом (а), миттєвий
обертальний рух навколо миттєвої осі
,
яка паралельна до осі
з кутовою швидкістю
.
Математично це можна записати так:
з обертанням навколо осі
,
отримаємо, згідно з пунктом (а), миттєвий
обертальний рух навколо миттєвої осі
,
яка паралельна до осі
з кутовою швидкістю
.
Математично це можна записати так:
![]() .
.
Відстань до миттєвої осі обертання можна визначити за формулою (2.97)
![]() .
.
Тепер,
якщо скласти миттєвий обертальний рух
навколо осі
з поступальним рухом з швидкістю
![]() ,
яка паралельна осі
,
то, згідно з пунктом б), отримаємо в
кожний момент часу гвинтовий рух, тобто
,
яка паралельна осі
,
то, згідно з пунктом б), отримаємо в
кожний момент часу гвинтовий рух, тобто
![]() (миттєвий
гвинтовий рух навколо
).
(миттєвий
гвинтовий рух навколо
).
Крок гвинта в даному випадку буде визначатись формулою
![]() .
(2.100)
.
(2.100)