

§ 47.4 Швидкість точок твердого тіла, яке обертається навколо нерухомої точки
Оскільки обертання твердого тіла навколо нерухомої точки в кожний момент часу можна розглядати як обертання навколо миттєвої осі, то швидкість будь-якої точки тіла в кожний момент часу можна визначити за формулою Ейлера (2.53)
![]() ,
(а)
,
(а)
в якій: – вектор кутової швидкості тіла; – радіус-вектор точки, швидкість якої визначається. Його можна проводити, як у випадку обертання навколо нерухомої осі, з будь-якої точки миттєвої осі. Але найвигідніше його провести з нерухомої точки тіла, як вказано на рис. 140.
З
Рис.
140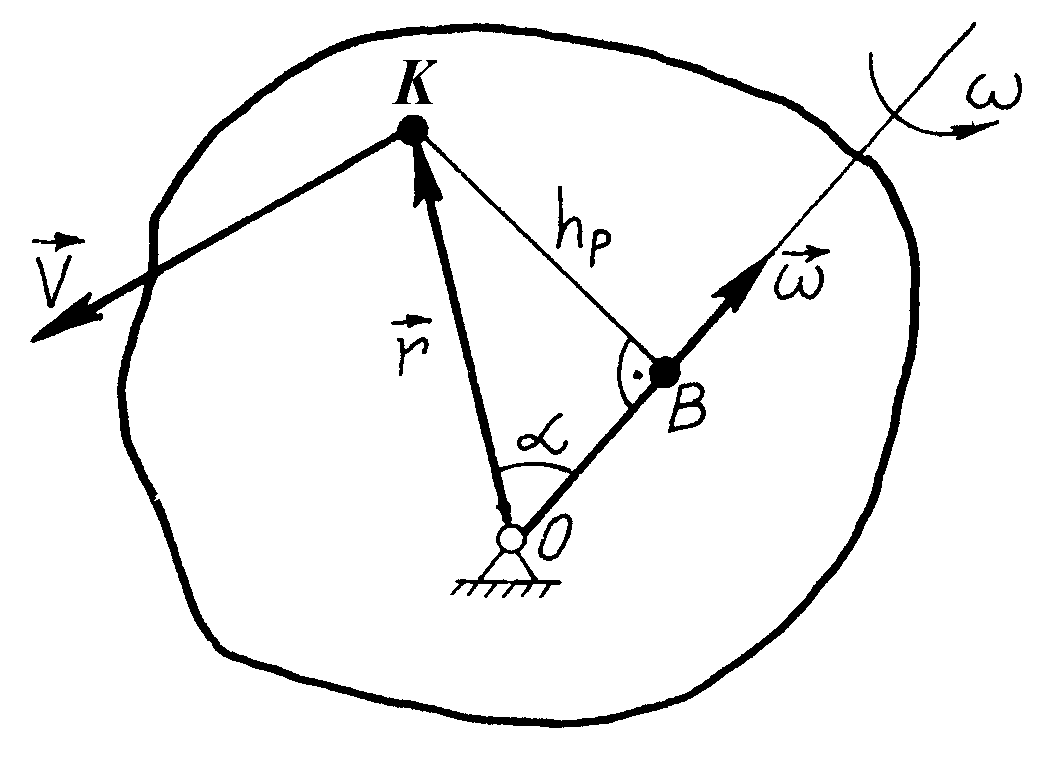
1. Вектор швидкості точки тіла, яке обертається навколо нерухомої точки, перпендикулярний до площини, в якій знаходяться вектори і і напрямлений в бік, звідки поворот на кут, менший 180, першого вектора до другого, щоб їх сумістити, видно проти руху годинникової стрілки.
2. Величина швидкості дорівнює
![]()
 ,
,
тобто
![]() .
(2.81)
.
(2.81)
Швидкість точки тіла, яке обертається навколо нерухомої точки, чисельно дорівнює добутку кутової швидкості тіла на відстань даної точки до миттєвої осі обертання.
Формулу (2.81) використовують не тільки для визначення швидкості точки тіла, яке здійснює сферичний рух. Її часто використовують і для визначення кутової швидкості самого тіла. Для цього шукають точку, швидкість якої можна визначити, не застосовуючи формулу (2.81). Знайдену швидкість ділять на відстань даної точки до миттєвої осі обертання, положення якої часто визначають з механічної умови задачі і отримують кутову швидкість тіла.
Якщо
нерухому точку
вибрати за початок нерухомої і рухомої
систем координат (див. рис. 133) і координати
точки, швидкість якої визначається,
позначити відповідно через (![]() )
– в нерухомій системі координат, (
)
– в нерухомій системі координат, (![]() )
– в рухомій, то на основі формул для
проекцій векторного добутку на координатні
осі з формули (а) отримаємо
)
– в рухомій, то на основі формул для
проекцій векторного добутку на координатні
осі з формули (а) отримаємо
![]() ;
;
![]() ;
(2.82)
;
(2.82)
![]() ;
;
![]() ;
;
![]() ;
(2.83)
;
(2.83)
![]() .
.
Формули
(2.82) визначають проекції вектора швидкості
точки тіла, яке здійснює сферичний рух,
на нерухомі осі координат, а формули
(2.83) – проекції на рухомі осі координат.
В даних формулах
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() – проекції вектора кутової швидкості
на відповідні осі координат.
– проекції вектора кутової швидкості
на відповідні осі координат.
Якщо
точка знаходиться на миттєвій осі
обертання, то швидкість її дорівнює
нулеві (![]() ),
а це означає, що дорівнюють нулеві
проекції вектора швидкості на координатні
осі. З формул (2.82) отримаємо рівняння
миттєвої осі обертання в нерухомій
системі координат
),
а це означає, що дорівнюють нулеві
проекції вектора швидкості на координатні
осі. З формул (2.82) отримаємо рівняння
миттєвої осі обертання в нерухомій
системі координат
![]() ;
;
![]() ;
;
![]() ,
,
або
![]() .
(2.84)
.
(2.84)
Отримане рівняння для конкретного моменту часу є рівнянням миттєвої осі обертання в нерухомій системі координат.
Якщо величини, які входять в рівняння (2.84), розглядати як функцію часу, то дане рівняння є параметричним рівнянням нерухомого аксоїда. Аналогічно з формул (2.83) можна отримати параметричне рівняння рухомого аксоїда
![]() .
(2.85)
.
(2.85)