

§ 46.6 Способи визначення положення миттєвого центра швидкостей
Користуючись поняттям миттєвого центра швидкостей, набагато спрощується визначення швидкостей точок плоскої фігури. Положення самого миттєвого центра швидкостей можна визначити або з механічної умови задачі, або за відомими швидкостями точок плоскої фігури.
З
Рис. 121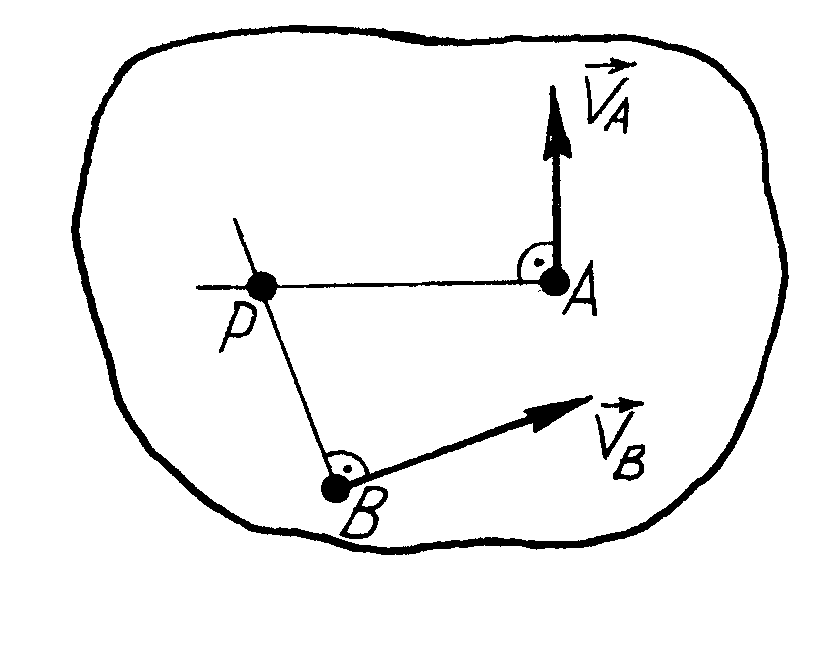
Інші часткові випадки знаходження положення миттєвого центра швидкостей зображені на рис. 122.
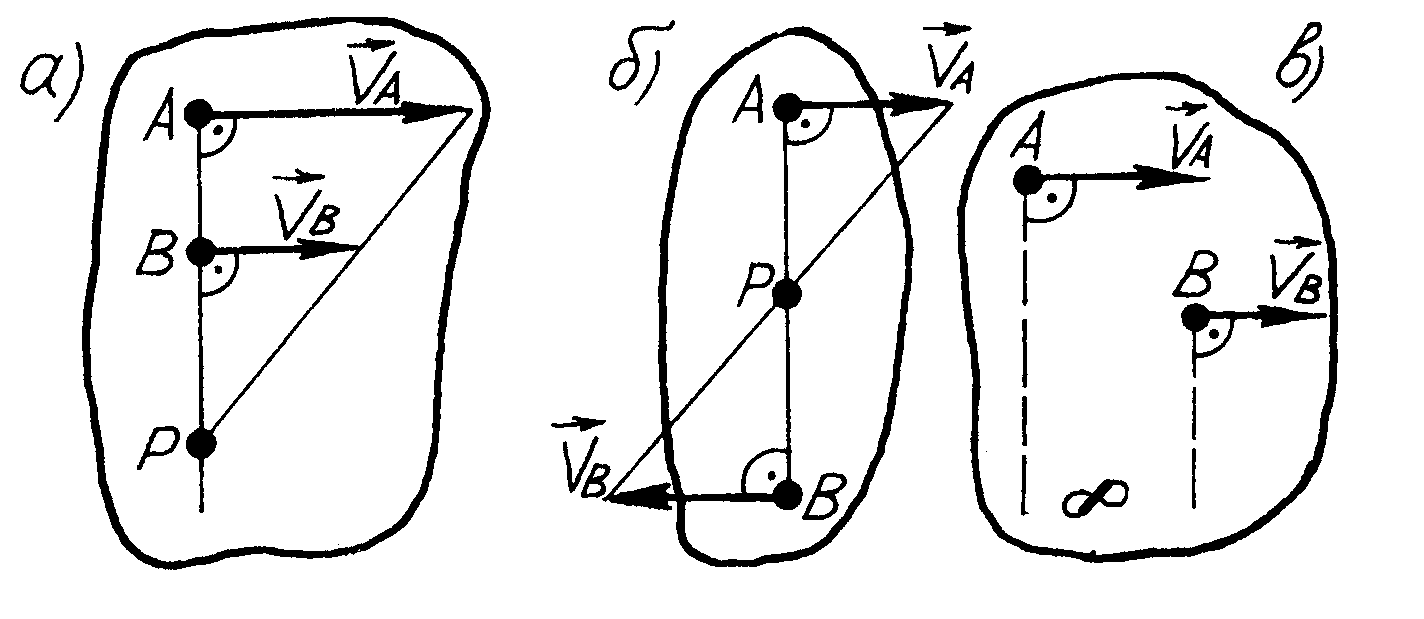
Рис. 122
Всі вони відповідають основним положенням, які були сформульовані вище.
Зазначимо, що у випадку, зображеному на рис. 122 в, миттєвий центр швидкостей плоскої фігури знаходиться в нескінченності. Кутова швидкість плоскої фігури, яка визначається за формулою (див. 2.70)
![]() ,
або
,
або
![]() ,
,
буде дорівнювати нулеві. Це означає, що обертальні швидкості всіх точок плоскої фігури навколо полюса дорівнюють нулеві. Звідси випливає, що швидкість всіх точок плоскої фігури дорівнюють швидкості полюса, тобто в даний момент часу плоска фігура буде здійснювати миттєво поступальний рух. Для цього руху швидкості всіх точок плоскої фігури геометрично рівні
![]() ,
,
а пришвидшення загалом різні
![]() .
.
Якщо
плоска фігура котиться по нерухомій
поверхні без ковзання (наприклад, колесо
– рис. 123), то її миттєвий центр ш
Рис. 123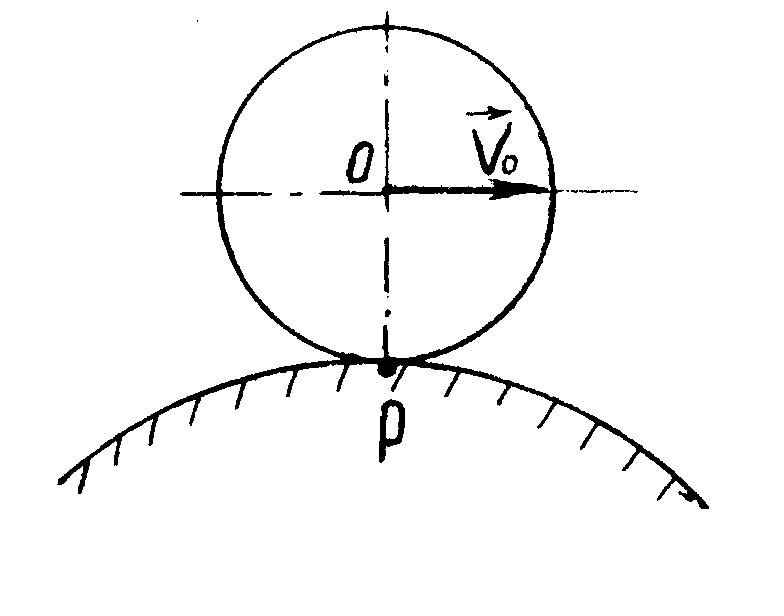
Геометричне місце послідовних положень на площині миттєвого центра швидкостей (або лінія, яка описується миттєвим центром швидкостей) називається центроїдою.
В
Рис. 124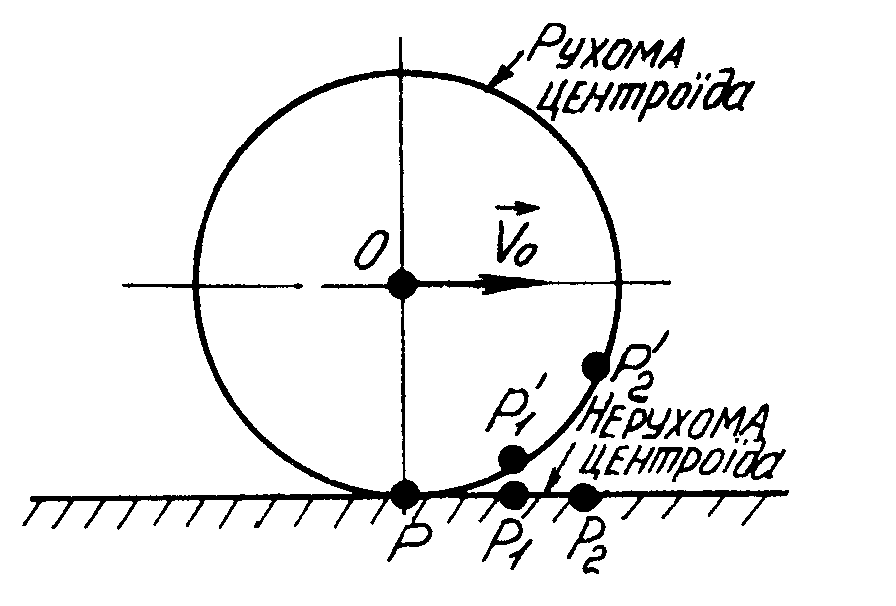
Нерухома центроїда – це лінія, яка описується миттєвим центром швидкостей в нерухомій площині.
Рухома центроїда – це лінія, яка описується миттєвим центром швидкостей в рухомій площині, яка з’єднана з плоскою фігурою. При русі плоскої фігури рухома центроїда котиться без ковзання по нерухомій центроїді (рис. 124).
§ 46.7 Теорема про пришвидшення точок плоскої фігури
Розглянемо
плоску фігуру, котра переміщається в
площині рисунка (рис. 125). За полюс плоскої
фігури візьмемо точку О, яка в цей момент
часу має пришвидшення
![]() .
Нехай навколо полюса плоска фігура
обертається з кутовою швидкістю
,
маючи в даний момент кутове пришвидшення
,
як вказано на рис. 125.
.
Нехай навколо полюса плоска фігура
обертається з кутовою швидкістю
,
маючи в даний момент кутове пришвидшення
,
як вказано на рис. 125.
В
Рис. 125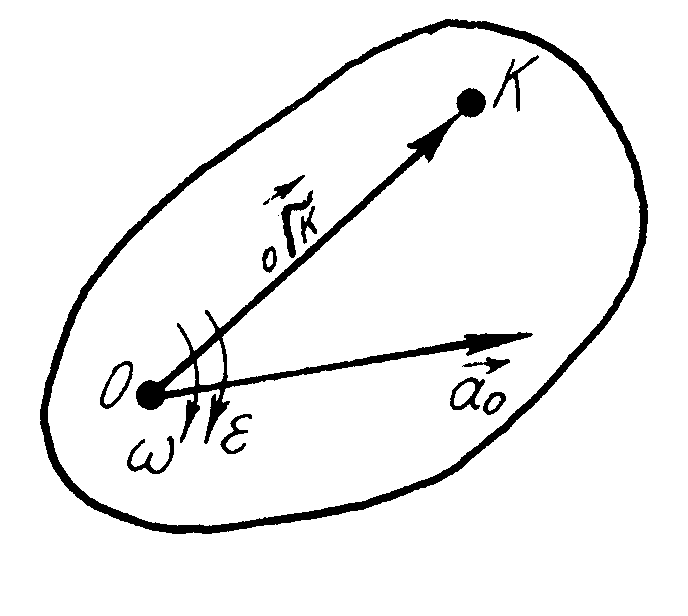
![]() ,
і визначимо її пришвидшення.
,
і визначимо її пришвидшення.
Оскільки рух плоскої фігури є складним рухом, який складається з поступального руху разом з полюсом і обертального руху навколо полюса, то кожна точка плоскої фігури здійснює також складний рух. Якщо так, то пришвидшення будь-якої точки плоскої фігури можна визначити за теоремою Коріоліса (див. формулу 2.59).
![]() .
(а)
.
(а)
Прийнявши поступальний рух плоскої фігури за переносний рух, отримаємо, що переносне пришвидшення всіх точок плоскої фігури буде однакове і дорівнюватиме пришвидшенню полюса
![]() .
(б)
.
(б)
Коріолісове пришвидшення всіх точок плоскої фігури буде дорівнювати нулеві, бо переносний рух є поступальним
![]() .
(в)
.
(в)
Відносним рухом плоскої фігури є обертання її навколо полюса О, тому відносне пришвидшення точки К буде визначатися, як визначається пришвидшення точки в обертальному русі (див. формули 2.49 а, 2.56, 2.57)
![]() .
(г)
.
(г)
Підставляючи (б, в, г) у формулу (а), отримуємо
![]() .
(2.71)
.
(2.71)
Пришвидшення будь-якої точки плоскої фігури дорівнює геометричній сумі пришвидшення полюса і пришвидшення даної точки в обертанні навколо полюса.
Формулу (2.71) з врахуванням залежності (г) можна представити і так:
![]() .
(2.72)
.
(2.72)
Пришвидшення будь-якої точки плоскої фігури дорівнює геометричній сумі трьох пришвидшень: при-швидшення полюса, обертального і доцентрового пришвидшень даної точки в обертанні навколо полюса.
О
Рис. 126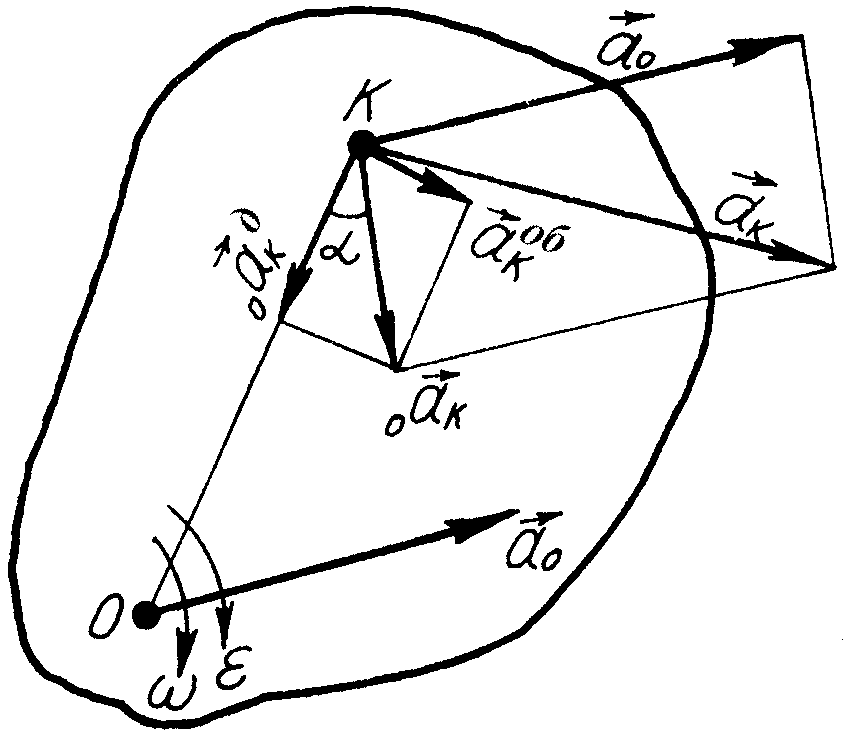
![]()
і вектор якого напрямлений від точки К до полюса, і обертального пришвидшення, величина якого обчислюється за формулою (див. 2.47)
![]()
і
вектор якого напрямлений перпендикулярно
до відрізка ОК
в бік кутового пришвидшення (рис. 126).
Геометрично склавши
![]() і
і
![]() ,
отримаємо пришвидшення точки в
обертальному русі навколо полюса О,
величина якого знаходиться за формулою
,
отримаємо пришвидшення точки в
обертальному русі навколо полюса О,
величина якого знаходиться за формулою
![]() .
(2.73)
.
(2.73)
Цей вектор утворює кут з відрізком ОК. Тангенс цього кута визначається за формулою
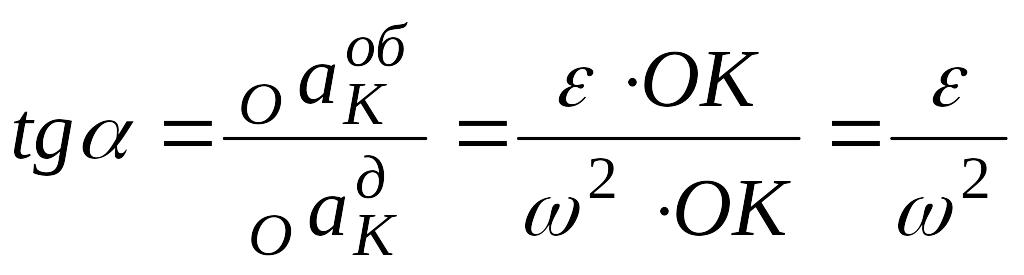 .
(2.74)
.
(2.74)
Вектор
загального пришвидшення
![]() точки К
є діагональ паралелограма, побудованого
на векторах пришвидшень
точки К
є діагональ паралелограма, побудованого
на векторах пришвидшень
![]() і
і
![]() (рис. 126).
(рис. 126).