

§ 44.1 Основні поняття і визначення
Складний рух точки будемо вивчати на моделі, яка зображена на рис. 107, де позначено:
![]() – нерухому
систему координат;
– нерухому
систему координат;
– тіло, яке здійснює деякий рух в системі координат ; в подальшому це тіло будемо називати носієм;
![]() – рухому
систему координат, яка жорстко зв’язана
з носієм;
– рухому
систему координат, яка жорстко зв’язана
з носієм;
– точка, яка рухається по носію;
– траєкторія руху точки по носію;
![]() –
точка
носія, з якою в даний момент співпадає
рухома точка;
–
точка
носія, з якою в даний момент співпадає
рухома точка;
![]() – координати
точки
в рухомій системі координат.
– координати
точки
в рухомій системі координат.
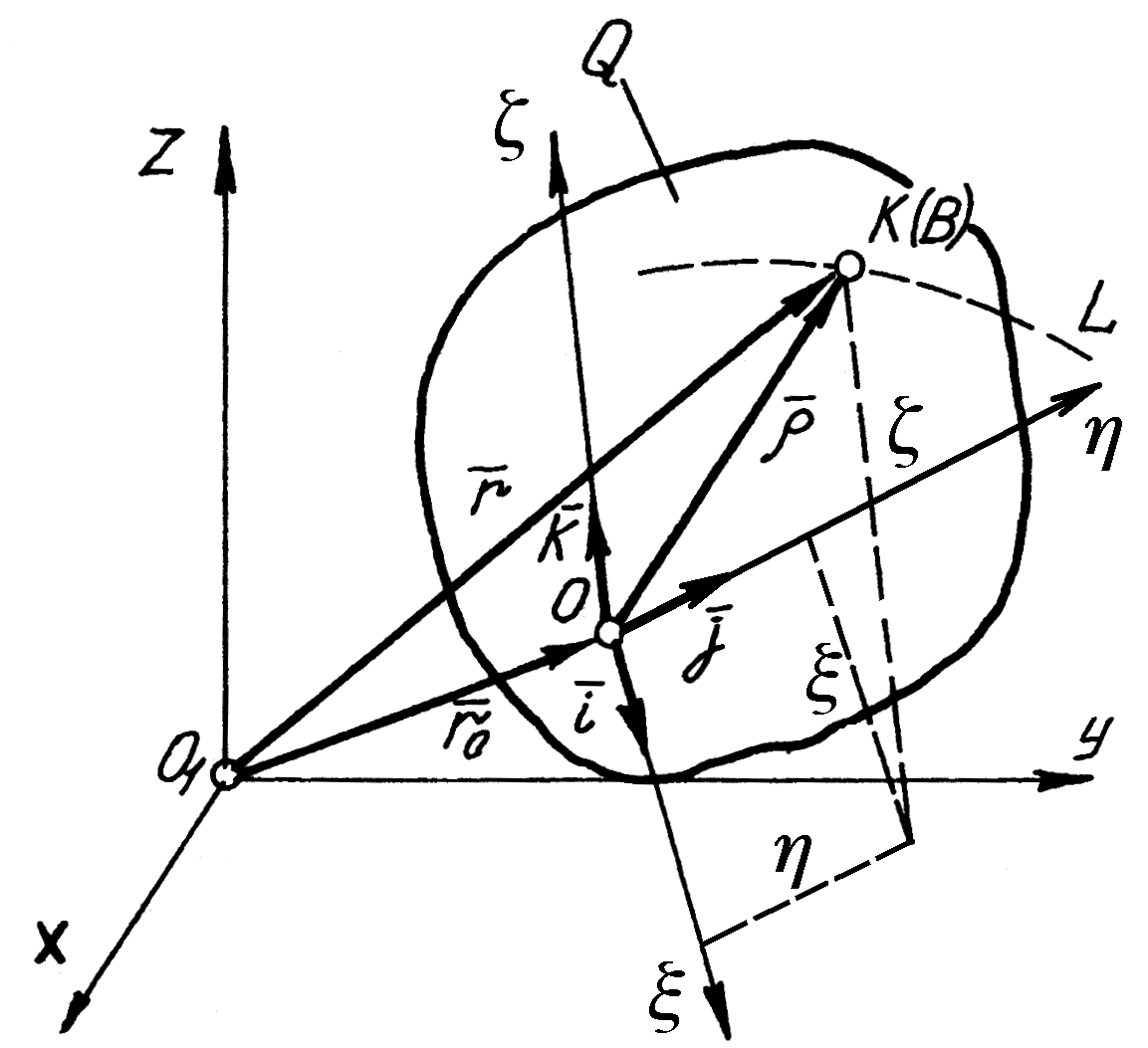
Рис. 107
Рух точки відносно системи координат є складним. Він складається з руху точки відносно носія і руху, який надається точці носієм.
Введемо основні поняття і визначення, якими користуються при розгляді складного руху точки.
1. Рух точки К відносно нерухомої системи координат називається абсолютним рухом. Траєкторія, швидкість і пришвидшення точки в абсолютному русі, тобто відносно нерухомої системи координат , називаються абсолютними.
Абсолютну
швидкість і абсолютне пришвидшення
позначають відповідно
і
![]()
Згідно з рис. 107 положення точки в нерухомій системі координат визначається радіусом-вектором , тоді рівняння
![]()
очевидно, описуватиме абсолютний рух точки. Абсолютна швидкість і пришвидшення визначається як відповідні похідні за часом від радіуса-вектор , тобто
![]() (a)
(a)
2. Рух точки К відносно рухомої системи координат називається відносним рухом. Траєкторія, швидкість і пришвидшення точки у відносному русі, тобто відносно рухомої системи координат (носія), називаються відносними.
Відносна швидкість і відносне пришвидшення позначаються відповідно і (індекс “ ” від французького слова relatif – відносний).
Положення
точки
в рухомій системі координат визначається
радіусом-вектором
![]() ,
зміна якого зумовлена двома
причинами: відносним рухом точки;
переміщенням рухомої системи координат.
Щоб виключити останню причину зміни
,
необхідно рухому систему координат
умовно зупинити (“заморозити”).
Замороження рухомої системи координат
математично позначається
,
зміна якого зумовлена двома
причинами: відносним рухом точки;
переміщенням рухомої системи координат.
Щоб виключити останню причину зміни
,
необхідно рухому систему координат
умовно зупинити (“заморозити”).
Замороження рухомої системи координат
математично позначається
![]() .
За такої умови
як функція часу буде описувати відносний
рух точки, тобто рівняння
.
За такої умови
як функція часу буде описувати відносний
рух точки, тобто рівняння
![]()
описує відносний рух точки. Відносна швидкість і пришвидшення визначаються як відповідні похідні за часом від радіуса-вектора
 (б)
(б)
3. Рух рухомої системи координат (носія) відносно нерухомої системи координат називається переносним рухом. Швидкість і пришвидшення точки носія, з якою в даний момент співпадає точка , називається переносними.
Переносна
швидкість і переносне пришвидшення
позначається відповідно
![]() і
і
![]() (індекс “
(індекс “![]() ”
від французького слова entrainer
– переносити). В нашому випадку точка
,
яка здійснює складний рух, в даний момент
часу співпадає з точкою
носія (рис. 107), отже швидкість і пришвидшення
точки
для точки
будуть переносними, тобто:
”
від французького слова entrainer
– переносити). В нашому випадку точка
,
яка здійснює складний рух, в даний момент
часу співпадає з точкою
носія (рис. 107), отже швидкість і пришвидшення
точки
для точки
будуть переносними, тобто:
![]() (в)
(в)
Як приклад, розглянемо переміщення пасажира в рухомому поїзді. Як було сказано вище, пасажир здійснює складний рух – рухається разом з поїздом і переміщається відносно поїзда (вагона). То згідно зі сформульованими визначеннями рух пасажира відносно поверхні Землі (в даному прикладі Землю вважаємо нерухомою) буде абсолютним рухом. Швидкість і пришвидшення пасажира відносно поверхні Землі є абсолютними. Переміщення пасажира відносно поїзда (вагона) є відносним рухом. Швидкість і пришвидшення пасажира відносно вагона є відносними. Для встановлення відносного руху пасажира і його характеристик необхідно, щоб спостерігач перебував у цьому ж вагоні, а це означає, що носій (в нашому випадку вагон) відносно спостерігача “заморожений”. Рух вагона для пасажира буде переносним рухом. І дійсно, вагон переносить пасажира відносно поверхні Землі. Переносною швидкістю і переносним пришвидшенням для пасажира будуть швидкість і пришвидшення точки вагона, з якою в даний момент співпадає пасажир. Враховуючи, що вагон здійснює поступальний рух, швидкість і пришвидшення вагона для пасажира будуть переносними.
Основним завданням теоретичного курсу кінематики складного руху точки є встановлення залежності між кінематичними характеристиками абсолютного, переносного і відносного рухів.