

§ 38 Швидкість і пришвидшення точки в полярних координатах
Я
Рис.
89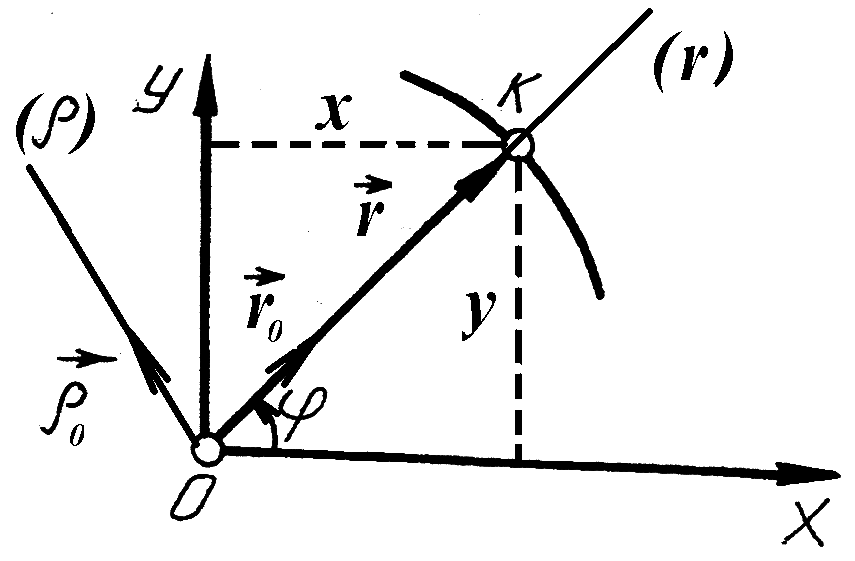
![]() .
При русі точки координати
і
неперервно змінюються, тобто є функціями
часу
.
При русі точки координати
і
неперервно змінюються, тобто є функціями
часу
![]()
![]() (2.14)
(2.14)
Записані рівняння є рівняннями руху точки в полярних координатах. З рис. 89 видно, що залежність між декартовими і полярними координатами визначається співвідношеннями
![]()
![]() (а)
(а)
Продиференціювавши співвідношення (а) за часом, отримаємо проекції вектора швидкості точки на декартові осі координат
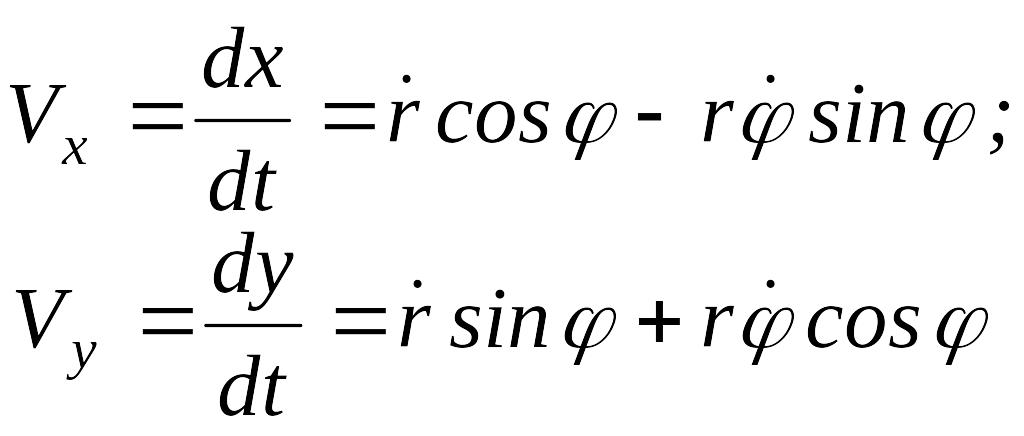 (б)
(б)
і, використовуючи формулу (2.9), визначимо величину вектора швидкості
![]()
Отже,
![]() (2.15)
(2.15)
Ф
Рис. 90

![]() напрямлений по радіусу-вектору
в бік зростання
і
напрямлений по радіусу-вектору
в бік зростання
і
![]() ,
повернутий відносно
на кут
,
повернутий відносно
на кут
![]() в бік зростання кута
(рис. 89). Із формули (2.15) видно, що швидкість
точки в полярній системі координат
дорівнює сумі двох взаємно перпендикулярних
векторів:
в бік зростання кута
(рис. 89). Із формули (2.15) видно, що швидкість
точки в полярній системі координат
дорівнює сумі двох взаємно перпендикулярних
векторів:
![]() – радіальної складової і
– радіальної складової і
![]() – поперечної (трансверсальної) складової.
Якщо
– поперечної (трансверсальної) складової.
Якщо
![]() і
і
![]() додатних знаків, то вектори
додатних знаків, то вектори
![]() і
і
![]() співпадають із напрямами одиничних
векторів
і
і навпаки, якщо
і
від’ємних знаків, то і вектори
і
мають напрями, протилежні до
і
(рис. 90).
співпадають із напрямами одиничних
векторів
і
і навпаки, якщо
і
від’ємних знаків, то і вектори
і
мають напрями, протилежні до
і
(рис. 90).
За допомогою формул (2.11) і (2.12) визначимо пришвидшення точки. Для цього співвідношення (б) ще раз диференціюємо за часом

Згрупувавши окремі члени, отримаємо
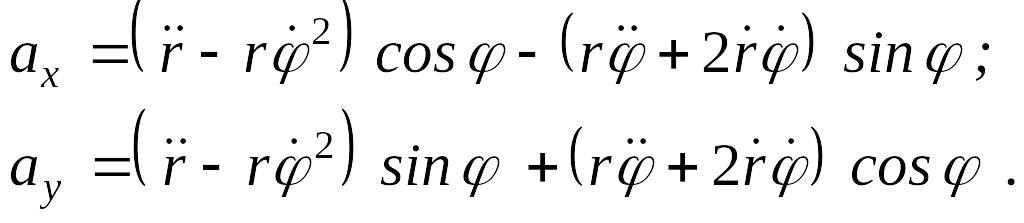
Величину вектора пришвидшення визначимо за формулою
![]() .
(2.16)
.
(2.16)
Формула (2.16) визначає величину вектора пришвидшення точки, рух якої задано в полярних координатах, тобто визначається рівняннями (2.14).
Із
формули (2.16) видно, що пришвидшення точки
в полярній системі координат дорівнює
сумі двох взаємно перпен-дикулярних
векторів:
![]() – радіальної складової і
– радіальної складової і
![]() – трансверсальної складової. Напрями
векторів
– трансверсальної складової. Напрями
векторів
![]() і
і
![]() визначаються так само, як і напрями
векторів швидкості, і залежать від
знаків алгебраїчних величин
визначаються так само, як і напрями
векторів швидкості, і залежать від
знаків алгебраїчних величин
![]() і
і
![]() .
Вектори
і
для випадку
.
Вектори
і
для випадку
![]() і
і
![]() показані на рис. 90.
показані на рис. 90.
§ 39 Натуральна система координат
На
просторовій кривій
,
яка є траєкторією руху точки, розглянемо
два близькі положення точки
![]() (рис. 91, а).
(рис. 91, а).
Проведемо
в цих точках дотичні до кривої, орти
яких позначимо відповідно
![]() і
і
![]() .
Перенесемо вектор
паралельно самому собі в точку
і через вектори
і
.
Перенесемо вектор
паралельно самому собі в точку
і через вектори
і
![]() проведемо площину. Граничне положення
цієї площини при наближенні точки
до точки
називається стичною
площиною
(площина І). Через точку
,
перпендикулярну до дотичної
,
проведемо площину, яка називається
нормальною
площиною (площина ІІ на рис. 91, а). Очевидно,
що будь-яка пряма, проведена в цій площині
через точку
,
буде перпендикулярна до
проведемо площину. Граничне положення
цієї площини при наближенні точки
до точки
називається стичною
площиною
(площина І). Через точку
,
перпендикулярну до дотичної
,
проведемо площину, яка називається
нормальною
площиною (площина ІІ на рис. 91, а). Очевидно,
що будь-яка пряма, проведена в цій площині
через точку
,
буде перпендикулярна до
![]() ,
тобто буде нормаллю кривої.
,
тобто буде нормаллю кривої.
Ліня перетину стичної і нормальної площин називається головною нормаллю кривої. Площина, проведена через точку перпендикулярно до головної нормалі, називається спрямною площиною (площина ІІІ на рис. 91, а). Лінія перетину спрямної і нормальної площин називається бінормаллю кривої. Стична, нормальна і спрямна площини утворюють натуральний тригранник.
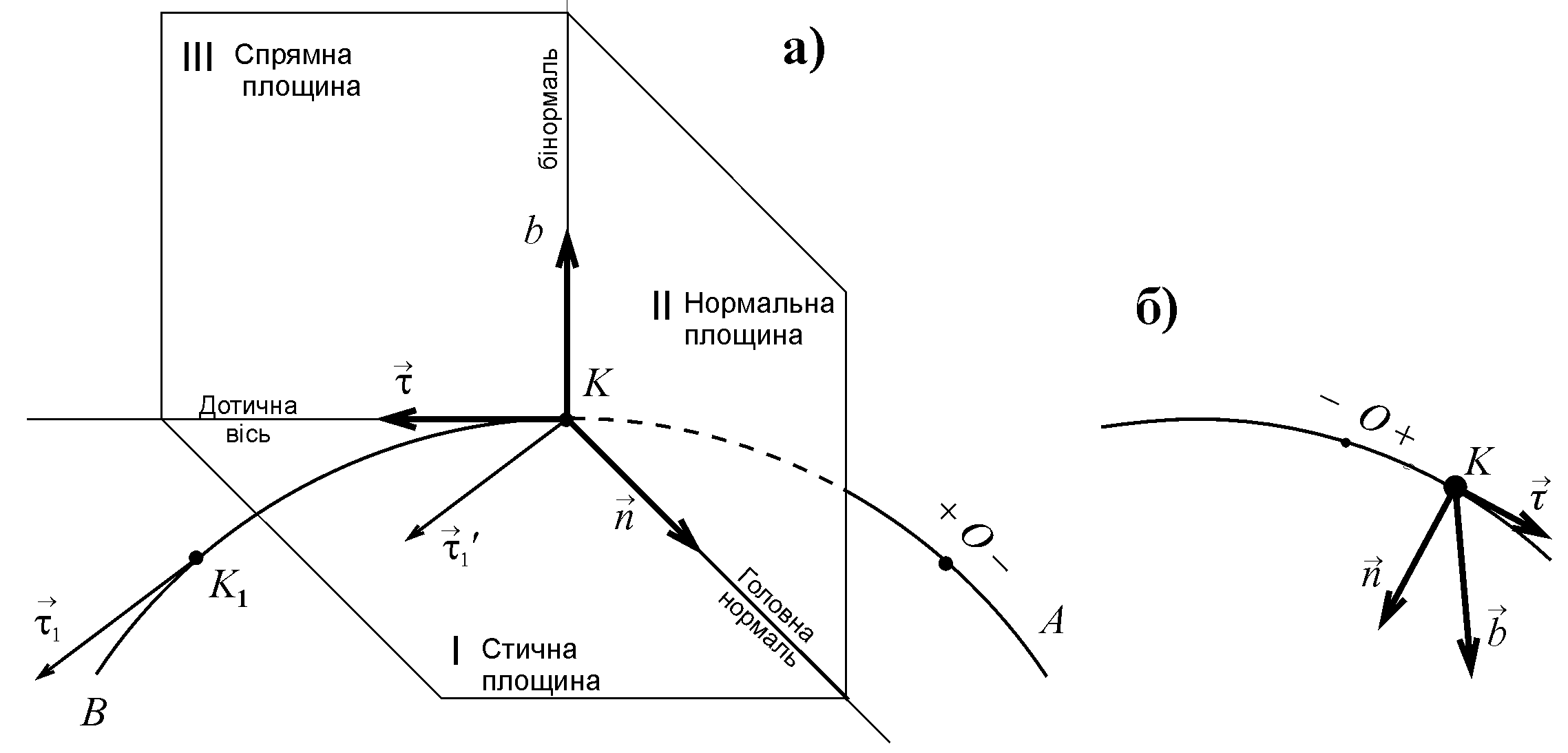
Рис. 91
Таким чином, в кожній точці кривої можна провести три взаємно перпендикулярні напрями і прийняти їх за координатні осі: дотичну, напрямлену в бік зростання дугової координати; головну нормаль, напрямлену в бік вгнутості кривої, і бінормаль, напрямлену перпендикулярно до дотичної і головної нормалі так, щоб утворити з ними праву систему осей (рис. 91, а). Якщо поміняти напрям додатного відрахунку на кривій, то поміняють свій напрям дотична вісь і бінормаль (рис. 91, б).
Орти
цих осей позначають
![]()
Осі дотична, головна нормаль і бінормаль утворюють натуральну систему координат з початком в рухомій точці, а отже, і рухаються разом з нею, залишаючись взаємно перпендикулярними.