

§ 13 Аналітичне визначення моменту сили відносно довільної точки
На
практиці часто зустрічаються задачі,
в яких вимагається визначити момент
сили, заданої своїми проекціями на
координатні осі, відносно точки, положення
якої задається координатами. Отримаємо
відповідні формули. Для цього (див. рис.
25) розглянемо декартовий простір з
координатними осями
![]() ,
яким відповідають орти
,
яким відповідають орти
![]() .
Нехай в даному просторі в точці
з координатами
.
Нехай в даному просторі в точці
з координатами
![]() діє сила
,
проекції якої на координатні осі
відповідно дорівнюють
діє сила
,
проекції якої на координатні осі
відповідно дорівнюють
![]() .
Візьмемо довільну точку
з координатами
.
Візьмемо довільну точку
з координатами
![]() і визначимо момент сили
відносно цієї точки. За формулою (1.15)
маємо
і визначимо момент сили
відносно цієї точки. За формулою (1.15)
маємо
![]() .
.
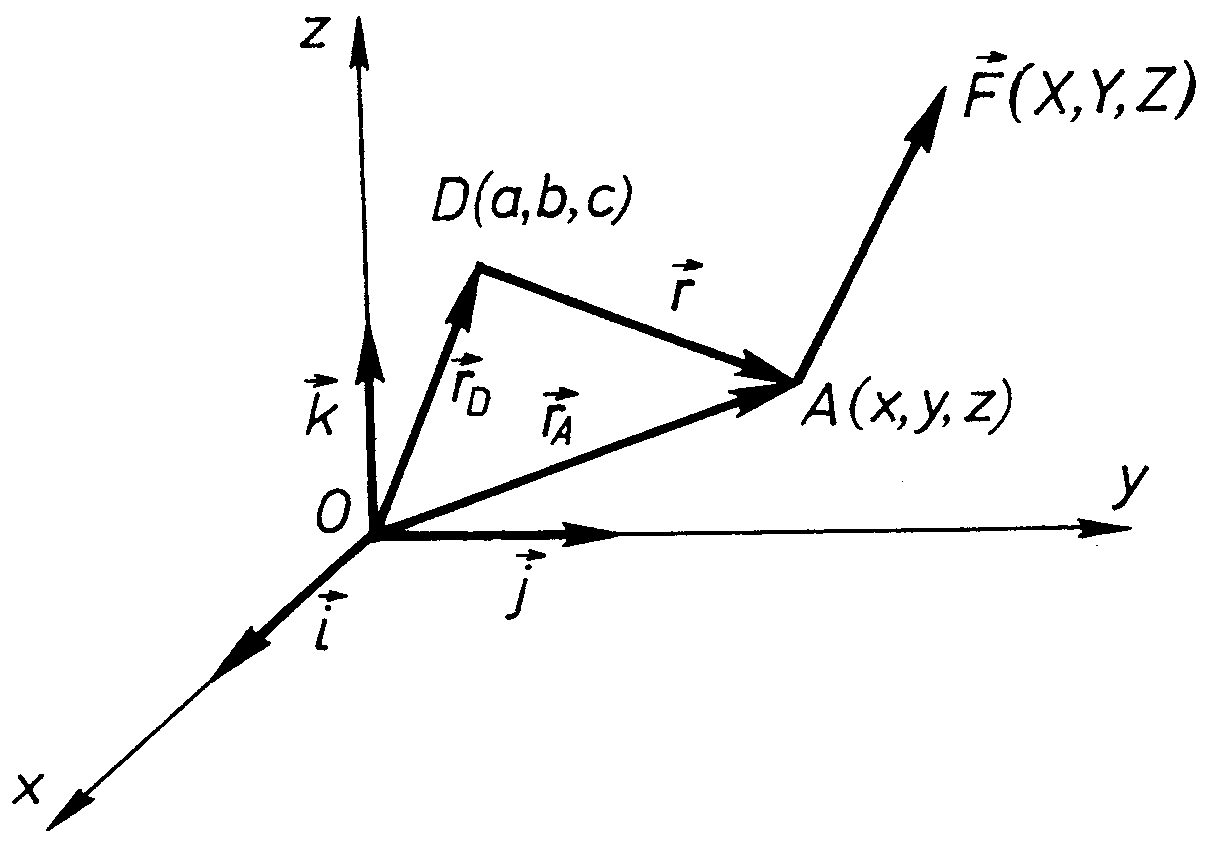
Рис. 25
З векторної алгебри відомо, що кожний векторний добуток можна представити у вигляді визначника. В нашому випадку
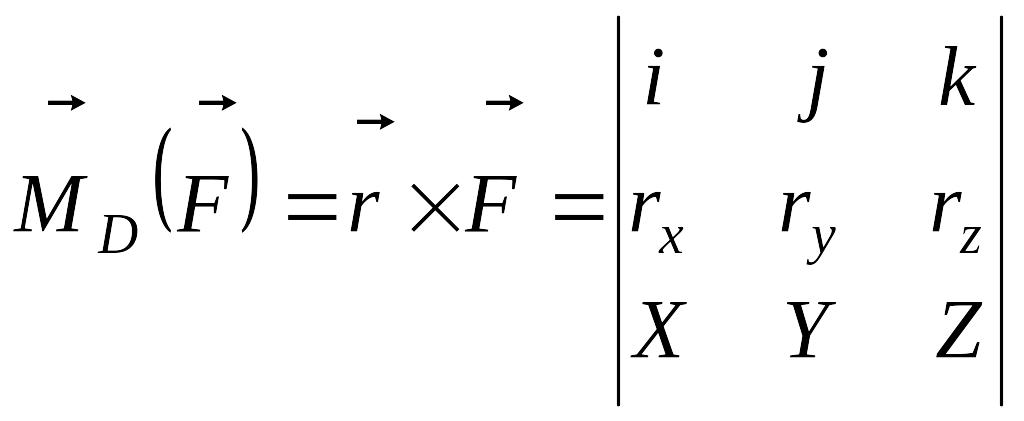 .
.
Розкривши визначник за елементами першого рядка, отримаємо
![]() ,
(а)
,
(а)
де
![]() – проекції радіус-вектора
на координатні осі.
– проекції радіус-вектора
на координатні осі.
Згідно
з рис. 25 маємо
![]() ,
отже
,
отже
 (б)
(б)
Сам
вектор
![]() можна розкласти вздовж осей координат
можна розкласти вздовж осей координат
![]() .
(в)
.
(в)
Співставляючи рівності (а) і (в) і враховуючи (б), отримаємо
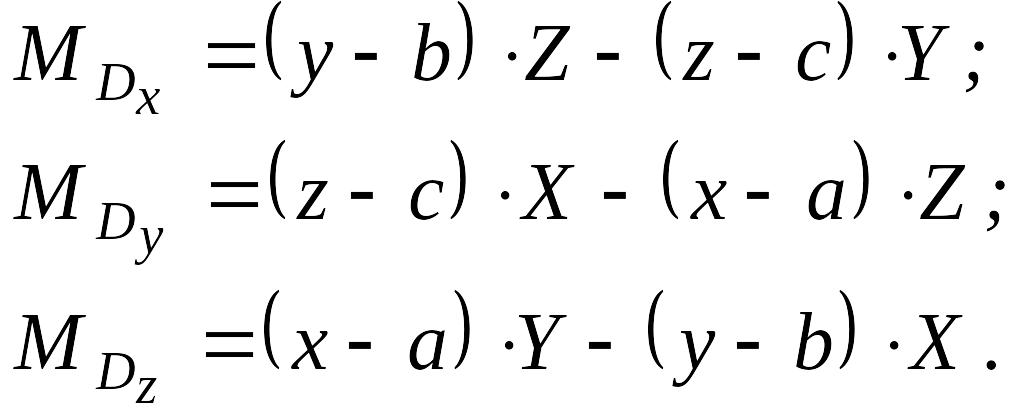 ,
(1.19)
,
(1.19)
Формули (1.19) визначають проекції на декартові осі координат вектора моменту сили відносно точки .
Знаючи проекції, за формулою
![]() (1.20)
(1.20)
легко обчислюється модуль вектора моменту відносно точки . Напрямні косинуси вектора дорівнюють
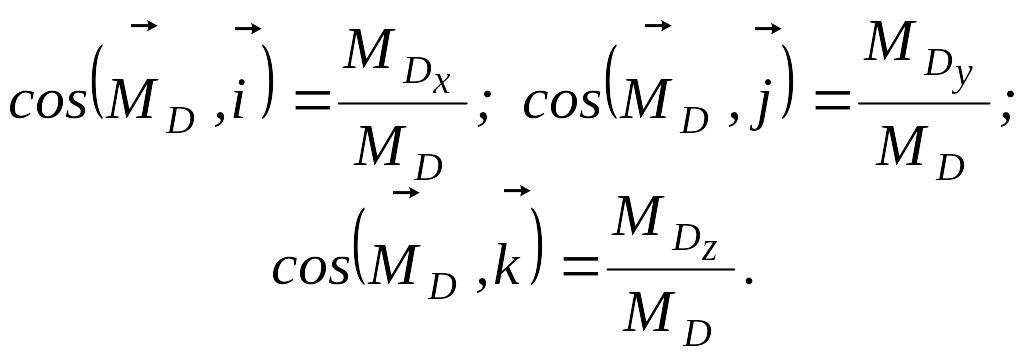 (1.21)
(1.21)
Отримані
формули (1.19)–(1.21) аналітично визначають
вектор моменту сили відносно довільної
точки
з координатами
.
Якщо точка
збігається з початком координат
![]() ,
тоді
,
тоді
![]() ,
і формули (1.19) набувають вигляду
,
і формули (1.19) набувають вигляду
 (1.22)
(1.22)
Формули (1.22) визначають проекції на координатні осі вектора моменту сили відносно початку координат. Дані формули мають і другий зміст – вони визначають момент сили відносно координатних осей, адже у відповідності з формулою (1.18) проекція вектора моменту сили відносно точки на вісь, яка проходить через дану точку, дорівнює моменту цієї сили відносно даної осі.
§ 14 Теорема Варіньйона
Теорема. Момент рівнодійної системи сил відносно довільної точки дорівнює геометричній сумі моментів всіх сил системи відносно даної точки, а момент рівнодійної системи сил відносно осі дорівнює алгебраїчній сумі момен-тів всіх сил системи відносно даної осі.
Д
Рис. 26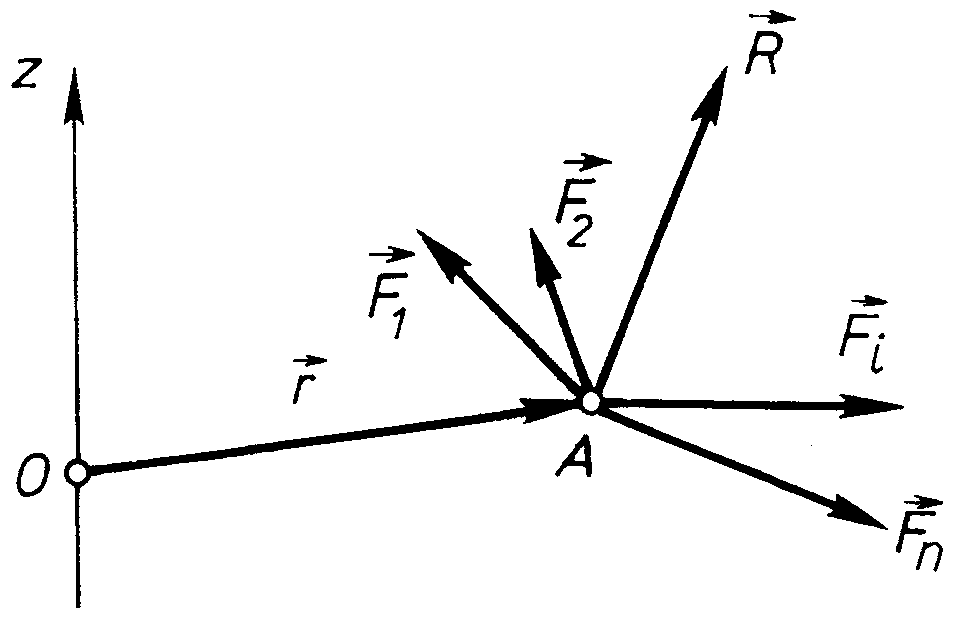
Нехай
сили
![]() даної системи прикладені до точки
(рис. 26).
даної системи прикладені до точки
(рис. 26).
До цієї ж точки буде прикладена і рівнодійна заданої системи сил. Визначимо її момент відносно довільної точки . З визначення моменту сили відносно точки (формула 1.15) маємо
![]() .
.
Оскільки
![]() ,
то отримаємо
,
то отримаємо
![]() .
.
Але
![]() ,
,
тоді
![]() ,
(1.23)
,
(1.23)
що і вимагалось довести в першій частині теореми Варіньйона.
Спроектувавши
векторну рівність (1.23) на вісь
![]() (рис. 26) і знаючи, що:
(рис. 26) і знаючи, що:
1) проекція вектора моменту сили відносно точки на вісь, що проходить через дану точку, дорівнює моменту заданої сили відносно цієї осі;
2) проекція векторної суми на вісь дорівнює алгебраїчній сумі відповідних проекцій,
отримаємо рівність, яку необхідно було довести в другій частині теореми Варіньйона
![]() .
(1.24)
.
(1.24)
Примітки.
1. Теорема Варіньйона доведена для найпростішої системи сил – збіжної, бо нам поки що відомо єдину систему сил, яка зводиться до рівнодійної. Такою системою є система збіжних сил. Проте вона має місце для будь-якої системи сил, яка зводиться до рівнодійної.
2. Якщо сили і точка розміщені в одній площині, то їх вектори моментів сил перпендикулярні до цієї площини, тобто вони лежать на одній прямій і рівність (1.23) можна записати у вигляді
![]() .
(1.25)
.
(1.25)
Отже,
алгебраїчний момент рівнодійної плоскої системи сил відносно довільної точки, яка знаходиться в площині дії сил, дорівнює алгебраїчній сумі моментів складових сил відносно даної точки.
3. Теорема Варіньйона має широке практичне використання. На практиці її використовують там, де визначення моменту сили ускладнене через трудність визначення її плеча. У цих випадках діють так: силу розкладають на складові, для яких легко визначаються плечі, і момент даної сили визначають як суму моментів її складових.
Приклад.
Визначити момент сили
Н
(див.
рис. 27) відносно точки
,
якщо
![]() м,
м,
![]() м.
м.
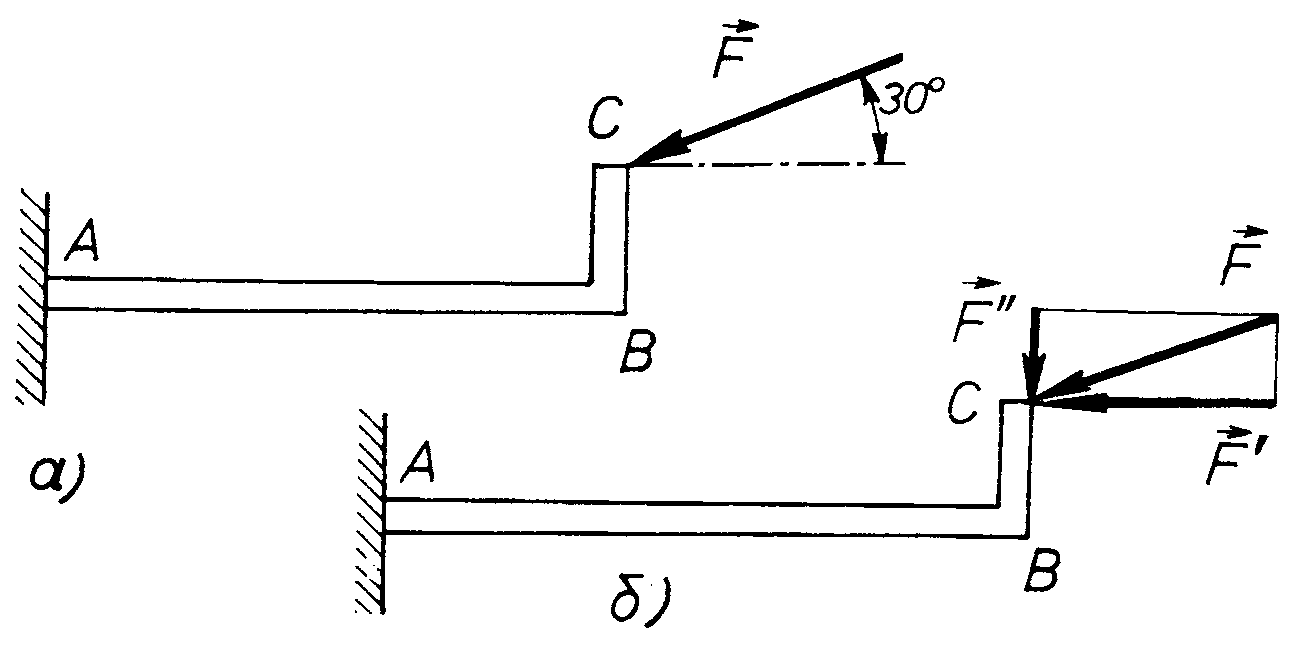
Рис. 27
Розв’язання. Для визначення моменту сили відносно точки розкладемо її на складові і (див. рис. 27, б), причому
![]() Н;
Н;
![]() Н.
Н.
Момент сили відносно точки визначимо як суму моментів її складових
![]()
![]() Нм.
Нм.