

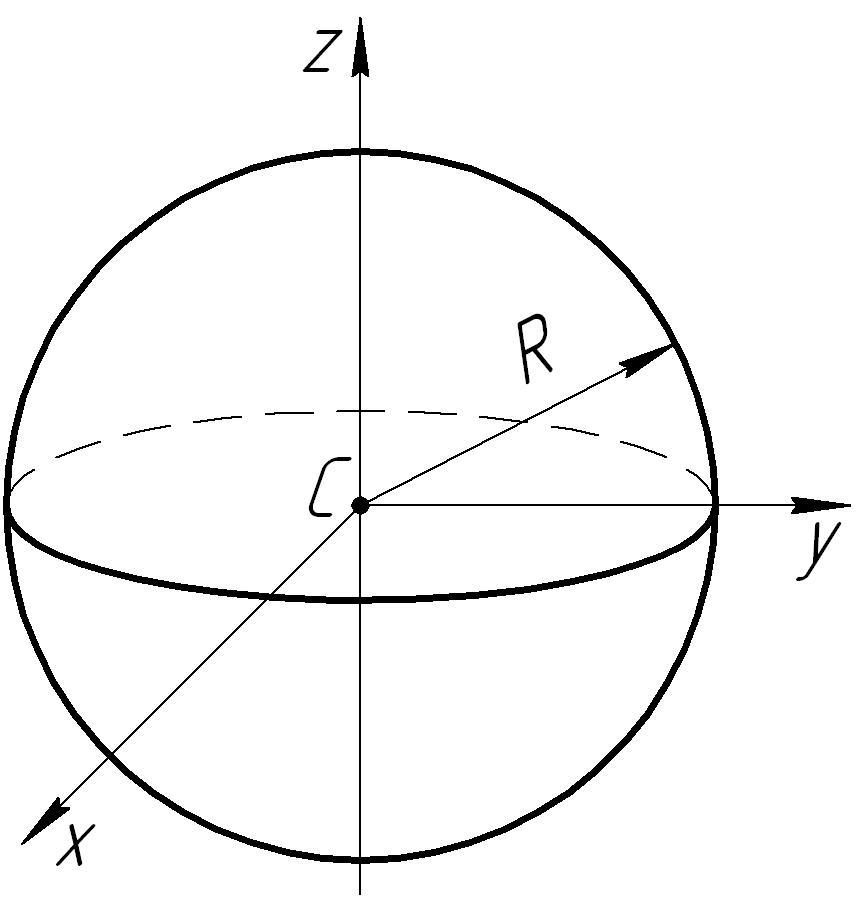
1.1.1 Динамікою називають розділ теоретичної механіки, в якому вивчають механічний рух матеріальної точки, системи матеріальних точок і абсолютно твердого тіла з урахуванням що діють на ці рухомі об’єкти.а) – “сил”;
1.1.2 Динамікою називають розділ теоретичної механіки в якому вивчають матеріальної точки, системи матеріальних точок і абсолютно твердого тіла з урахуванням сил, що діють на ці рухомі об’єкти.в) – “механічний рух”;
1.1.3 Динамікою називають розділ теоретичної механіки в якому вивчають механічний рух матеріальної точки, системи матеріальних точок і абсолютно твердого тіла з урахуванням сил на ці рухомі об’єкти.б) – “що діють”;
1.1.4 Виберіть правильне закінчення твердження. Динамікою називають розділ теоретичноїмеханіки,вякому вивчають механічний рух ______________.
г) – “матеріальної точки, системи матеріальних точок і абсолютно твердого тіла з урахуванням сил, що діють на ці об’єкти”;
1.1.5 Сила повністю характеризується:
в) – “точкою прикладення, числовим значенням і напрямом”;
1.1.6 Вкажіть правильне закінчення означення: інерціальними системами координат називають ___________.
в) – “системи координат, у яких справедливі закони Ньютона”;
1.1.7 Виберіть правильне закінчення означення: матері-альна точка – це ____________.
в) – “матеріальний об’єкт, розмірами якого в умовах даної задачі можна знехтувати”;
1.1.8 Маса точки – це фізична величина, яка є мірою її ___.
в) – “інерційних і гравітаційних властивостей”;
1.2.1 Дайте правильне формулювання І-го закону Ньютона (закону інерції).
Матеріальна точка зберігає стан спокою або рівномірного прямолінійного руху доти, поки, _____________.
б) – “дія інших тіл не змінить цього стану”;
1.2.2 Дайте правильне формулювання І-го закону Ньютона (закону інерції).
Матеріальна точка доти, поки дія інших тіл не змінить цього стану.
в) – “зберігає стан спокою або рівномірного прямолінійного руху”;
1.2.3 Дайте правильне закінчення формулювання ІІ-го закону Ньютона (основного закону механіки; закону сили).
Добуток маси точки на її вектор пришвидшення дорівнює _____________.
в) – “вектору сили, прикладеної до точки, а напрям пришвидшення збігається з напрямом цього вектора”;
1.2.4 Дайте правильне закінчення формулювання ІІ-го закону Ньютона (основного закону механіки; закону сили).
Добуток маси точки на її вектор пришвидшення дорівнює _______________.
а) – “вектору сили, прикладеної до точки, а напрям пришвидшення збігається з напрямом цього вектора”;
1.2.5 Дайте правильне формулювання ІІ-го закону Ньютона (основного закону механіки; закону сили).
Швидкість зміни кількості руху матеріальної точки дорівнює силі, що діє на точку, і спрямована ___________.
б) – “в напрямі дії сили”;
1.2.6 Вкажіть правильний вираз рівності, яка виражає ІІ-й закон Ньютона (основний закон механіки; закон сили).
в)
![]() ;
;
1.2.7 Дайте правильне формулювання ІІ-го закону Ньютона (основного закону механіки; закону сили).
Швидкість зміни кількості руху матеріальної точки дорівнює силі, що діє на точку і спрямована __________.б) – “в напрямі дії сили”;
1.2.8 Дайте правильне закінчення формулювання закону незалежності дії сили.
Якщо на матеріальну точку діє система сил, то пришвидшення, з яким рухається матеріальна точка, дорівнює ____________ пришвидшень, що викликаються кожною силою окремо.в) – “геометричній сумі”;
1.2.9 Вкажіть правильний вираз рівності, яка виражає закон незалежності дії сил:
г)
![]() ;
;
1.2.10 Дайте правильне формулювання ІІІ-го закону Ньютона (закону дії і протидії).
Кожна механічна дія супроводжується _______протидією.в) – “рівною і протилежно спрямованою”;
1.2.11
Вкажіть правильний вираз, який виражає
ІІІ-й закон Ньютона (закон дії і
протидії).а)
![]() ;
;
1.2.12 Вкажіть, що виражає ІІІ-й закон Ньютона:
в) – “рівність дії і протидії між двома матеріальними тілами”;
1.2.13 Вкажіть правильне формулювання ІІІ-го закону Ньютона (закону дії і протидії).
Дві матеріальні точки діють одна на одну із ___________.
б) – “силами однаковими за модулем і протилежними за напрямом”;
1.2.14 Вкажіть правильне формулювання ІІІ-го закону Ньютона (закону дії і протидії).
Дві матеріальні точки діють одна на одну із ___________.
в) – “силами однаковими за модулем і протилежними за напрямом”;
1.2.15 Вкажіть правильний вираз, який виражає основне рівняння динаміки матеріальної точки.
в)
![]() ;
;
1.2.16 Вкажіть правильний рисунок, який графічно пояснює основне рівняння динаміки.
|
г) |
|
1.2.17 Вкажіть правильний вираз, який виражає ІІ-й закон Ньютона (основний закон механіки; закон сили).
в)
![]() ;
;
1.2.18 Вкажіть правильний вираз, який виражає ІІ-й закон Ньютона (основний закон механіки; закон сили).
в)
![]() ;
;
1.2.19 Вкажіть правильний вираз, який виражає основне рівняння динаміки.
в)
![]() .
.
1.2.20 Вкажіть правильний вираз, за яким можна визначити величину ваги тіла Р.
в)
![]() ;
;
2.1.1 Вкажіть правильні вирази диференціальних рівнянь руху матеріальної точки в декартових координатах.
б)![]() ;
;
2.1.2 Вкажіть правильні вирази диференціальних рівнянь руху матеріальної точки в натуральних координатах.
д)
![]() .
.
2.1.3 Вкажіть правильні вирази диференціальних рівнянь руху матеріальної точки в натуральних координатах.
г)
![]() ;
;
2.1.4 Вкажіть правильні вирази диференціальних рівнянь руху матеріальної точки в натуральних координатах.
г)
![]() ;
;
2.1.5 Вкажіть правильні вирази диференціальних рівнянь руху матеріальної точки в декартових координатах.
в)
![]() ;
;
2.1.6 Вкажіть правильні вирази диференціальних рівнянь руху матеріальної точки в декартових координатах.
г)
![]() ;
;
2.1.7 Вкажіть повні правильні вирази диференціальних рівнянь руху матеріальної точки в декартових координатах.
д)![]() .
.
2.1.8 Вкажіть повні правильні вирази диференціальних рівнянь руху матеріальної точки в натуральних координатах.
д)![]() .
.
2.1.9 Вкажіть повний правильний вираз диференціального рівняння руху матеріальної точки у векторній формі.
в)
![]() ;
;
2.1.10
Вкажіть повний правильний вираз
диференціального рівняння руху
матеріальної точки вздовж осі Ох
під
дією сили
![]() .
.
д)
![]() .
.
2.1.11
Вкажіть повний правильний вираз
диференціального рівняння руху
матеріальної точки вздовж осі Оy
під дією сили
![]() .
.
г)
![]() ;
;
2.1.12
Вкажіть повний правильний вираз
диференціального рівняння руху
матеріальної точки вздовж осі Оz
під
дією сили
![]() .
.
г)
![]() ;
;
2.1.13
Вкажіть повні правильні вирази
диференціальних рівнянь руху матеріальної
точки вздовж осей Ох
і Оу
під дією сили
![]() .
.
|
г) |
|
2.1.14
Вкажіть повні правильні вирази
диференціальних рівнянь руху матеріальної
точки вздовж осей Ох
і Оz
під
дією сили
![]() .
.
|
г) |
|
2.1.15 Вкажіть правильний вираз диференціального рівняння вільного падіння твердого тіла.
г)
![]() ;
;
2.1.16 Вкажіть повні правильні вирази диференціальних рівнянь руху матеріальної точки вздовж осей Оу і Оz під дією системи сил.
|
б) |
|
2.2.1 Дайте правильне формулювання визначення першої задачі динаміки.
Пряма, або перша основна, задача динаміки матеріальної точки полягає у визначенні , за заданими її масою m і кінематичними характеристиками (рівняння руху, швидкість, пришвидшення) її руху.
а)
– “рівнодійної
![]() системи сил, що діють на матеріальну
точку”;
системи сил, що діють на матеріальну
точку”;
2.2.2 Дайте правильне формулювання визначення першої задачі динаміки.
Пряма,
або перша основна, задача динаміки
матеріальної точки полягає у визначенні
рівнодійної
![]() системи сил, що діють на матеріальну
точку, за заданими її
.
системи сил, що діють на матеріальну
точку, за заданими її
.
в) – “масою m і кінематичними характеристиками (рівняння руху, швидкість, пришвидшення) її руху”;
2.2.3
Вкажіть правильні вирази, за якими
знаходять модуль рівнодійної
![]() і
визначають її напрям.
і
визначають її напрям.
в)
![]()
![]() ;
;
2.2.4
Вкажіть правильні вирази розв’язку
прямої задачі динаміки матеріальної
точки під дією сили
![]() ,
заданої координатним способом визначення
її руху.
,
заданої координатним способом визначення
її руху.
д)
![]()
![]() .
.
2.2.5
Вкажіть правильні вирази розв’язку
прямої задачі динаміки матеріальної
точки під дією сили
![]() ,
заданої координатним способом визначення
її руху.
,
заданої координатним способом визначення
її руху.
б)
![]()
![]() ;
;
![]() .
.
2.2.6 Вкажіть правильне формулювання першої задачі динаміки матеріальної точки.
б) – “за відомими масою точки та рівняннями її руху знайти модуль і напрям рівнодійної сил, прикладених до точки”;
2.2.7 Вкажіть правильне продовження твердження:
З допомогою диференціальних рівнянь руху матеріальної точки в тій чи іншій системі координат .
в) – “розв’язується дві основні задачі (пряма та обернена) динаміки точки”;
2.2.8 Вкажіть правильне формулювання першої задачі динаміки матеріальної точки.
в) – “за відомими масою точки і законом її руху, знайти модуль і напрям рівнодійної сил, що діють на точку”;
2.3.1 Вкажіть правильне закінчення формулювання другої задачі динаміки.
Обернена або друга основна, задача динаміки матеріальної точки полягає у визначенні .
в) – “кінематичних характеристик руху за заданими масою m точки, силами, що діють на неї і початковими кінематичними характеристиками”;
2.3.2 Вкажіть диференціальне рівняння прямолінійного руху матеріальної точки і відповідні початкові кінематичні характеристики.
г)
![]() ;
;
2.3.3 Кінцевою метою розв’язування оберненої задачі динаміки матеріальної точки найчастіше є визначення____.
б) – “кінематичних рівнянь руху точки”;
2.3.4 Вкажіть правильне диференціальне рівняння прямолінійного руху точки і відповідні повні початкові умови її руху.
д)
![]() .
.
2.3.5 Вкажіть правильне диференціальне рівняння прямолінійного руху точки і відповідні повні початкові умови її руху.
г)
![]() ;
;
2.3.6 Вкажіть правильне диференціальне рівняння прямолінійного руху точки і відповідні повні початкові умови її руху.
б)
![]() ;
;
2.3.7 Вкажіть правильні диференціальні рівняння руху точки в площині Оху і відповідні повні початкові умови її руху.
|
г) |
|
2.3.8 Вкажіть правильне закінчення твердження:
Сталі інтегрування диференціальних рівнянь руху матеріальної точки визначають із .
в) – “положення і швидкості точки у початковий момент часу”;
2.3.9 Вкажіть правильні математичні записи змісту другої задачі динаміки точки.
г)
Відомі:
![]() .
.
-
Визначити:
2.3.10 Вкажіть правильні диференціальні рівняння руху точки в площині Оyz і відповідні повні початкові умови її руху.
|
д) |
|
2.3.11 Вкажіть правильні диференціальні рівняння руху точки в площині Оxz і відповідні повні початкові умови її руху.
|
в) |
|
2.3.12 Вкажіть правильні повні вирази початкових умов руху точки в декартовій системі координат в початковий момент часу.
б)
![]()
2.3.13 Дайте правильне закінчення твердження .
Початкові умови, які задаються при розв’язуванні другої (оберненої) задачі динаміки точки, визначають _________.
а) – “єдиний розв’язок системи диференціальних рівнянь руху точки”.
2.3.14 Вкажіть повне закінчення твердження:
Для визначення сталих інтегрування при розв’язуванні другої задачі динаміки точки для початкового моменту часу задають
б)
– “координати руху точки
![]() і проекції вектора швидкості
і проекції вектора швидкості![]() ”.
”.
2.3.15 Вкажіть правильні вирази повних початкових умов руху точки в площині Оху.
а)
![]() ;
;
2.3.16 Вкажіть правильні вирази повних початкових умов руху точки в площині Оуz.
г)
![]() ;
;
2.3.17 Вкажіть правильні вирази повних початкових умов руху точки в площині Охz.
в)
![]() ;
;
2.3.18 Вкажіть правильні вирази повних початкових умов руху точки вздовж осі Ох.
б)
![]() ;
;
2.3.19 Вкажіть правильні вирази повних початкових умов руху точки вздовж осі Оу.
в)
![]() ;
;
2.3.20 Вкажіть правильні вирази повних початкових умов руху точки вздовж осі Оz.
г)
![]() ;
;
2.4.1 Вкажіть правильне закінчення означення невільного руху матеріальної точки.
Рух матеріальної точки є невільним, якщо вона із-за накладених в’язей вимушена рухатись .
а) – “по заданій поверхні або кривій”;
2.4.2
Вкажіть правильні вирази диференціальних
рівнянь руху невільної матеріальної
точки по гладкій поверхні
рівняння
якої
![]() .
.
б)
![]() ;
;
2.4.3
Вкажіть правильні вирази множників
Лагранжа в диференціальних рівняннях
руху невільної матеріальної точки по
гладкій кривій, яка утворена перетином
двох поверхонь
![]() і
і![]() .
.
б)
![]() ;
;
2.4.4
Вкажіть правильний вираз множника
Лагранжа в диференціальних рівняннях
руху невільної матеріальної точки по
гладкій поверхні, рівняння якої
![]() .
.
а)
![]() ;
;
2.4.5
Вкажіть правильні вирази диференціальних
рівнянь Лагранжа першого роду руху
точки по гладкій лінії, яка утворена
перетином двох поверхонь
![]() і
і![]() .
.
|
в) |
|
2.5.1 Вкажіть правильні вирази диференціальних рівнянь руху механічної системи у векторній формі.
в)
![]() ;
;
2.5.2 Вкажіть правильні вирази диференціальних рівнянь руху механічної системи в проекціях на декартові осі координат.
|
а) |
|
2.6.1 Вкажіть правильні вирази диференціальних рівнянь поступального руху твердого тіла.
г)
![]() ;
;
2.6.2 Вивчення поступального руху твердого тіла зводиться до вивчення руху його центра мас, тобто точки, маса якої дорівнює масі тіла, під дією __________, прикладених до твердого тіла.
б) – “зовнішніх сил”;
2.7.1 Вкажіть правильний вираз диференціального рівняння обертання твердого тіла навколо нерухомої осі Оz.
б)
![]()
2.7.2 Вкажіть правильний вираз диференціального рівняння обертання твердого тіла навколо нерухомої осі Оx.
г)
![]() ;
;
2.7.3 Вкажіть правильний вираз диференціального рівняння обертання твердого тіла навколо нерухомої осі Оy.
г)
![]() ;
;
2.7.4 Вкажіть правильний вираз диференціального рівняння обертання твердого тіла навколо нерухомої осі Оz.
б)
![]() ;
;
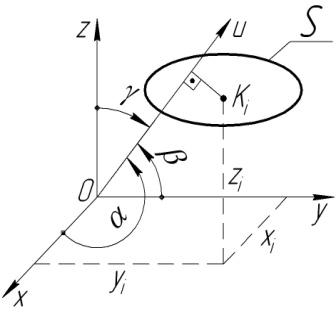
2.8.1 Вкажіть правильні вирази, які визначають кінетичні моменти твердого тіла, що обертається навколо нерухомої точки, відносно координатних осей, які є не головними осями інерцій.
|
а) |
|
2.8.2 Вкажіть правильні вирази, які визначають кінетичні моменти твердого тіла, що обертається навколо нерухомої точки, відносно координатних осей, які є головними осями інерцій.
|
б) |
|
2.8.3 Вкажіть правильні вирази, які визначають кінетичні моменти твердого тіла, що обертається навколо нерухомої точки, відносно координатних осей, які є головними осями інерцій.
|
в) |
| |
|
|
|
|
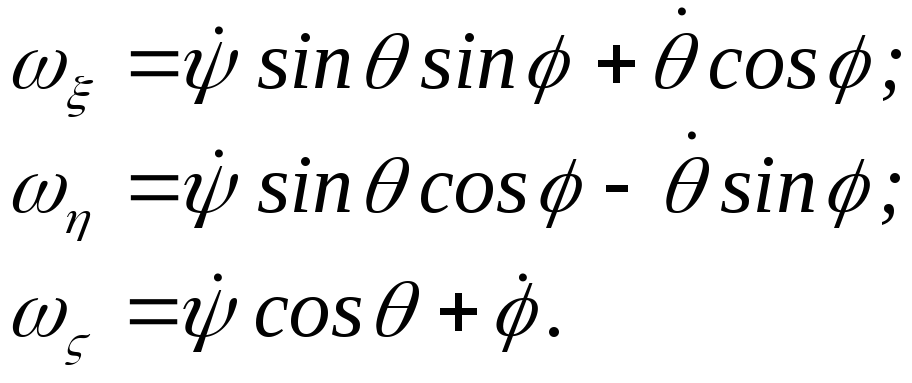
2.8.4 Вкажіть правильні вирази кінематичних рівнянь Ейлера обертання твердого тіла навколо нерухомої точки.
|
а) |
|
2.9.1 Вкажіть правильні вирази диференціальних рівнянь обертання твердого тіла навколо нерухомої точки, які називають динамічними рівняннями Ейлера.
|
а) |
|
2.10.1 Вкажіть правильні вирази диференціальних рівнянь руху вільного тіла.
|
в) |
|

2.11.1 Вкажіть правильні вирази диференціальних рівнянь плоскопаралельного руху твердого тіла.
|
б) |
|
2.11.2 Вкажіть правильні вирази диференціальних рівнянь плоскопаралельного руху твердого тіла.
|
в) |
|
2.11.3
В диференціальному рівнянні
плоскопаралельного руху твердого тіла
![]() ,
,![]() –
момент інерції тіла відносно осі, що
проходить через _____ до площини, паралельно
якій рухаються точки тіла.
–
момент інерції тіла відносно осі, що
проходить через _____ до площини, паралельно
якій рухаються точки тіла.
а) – “його центр мас перпендикулярно” ;
3.1.1 Вкажіть правильну формулу, за якою визначають масу механічної системи, якщо вона розподілена непе-рервно (наприклад, тверде тіло).
б)
![]() ;
;
3.1.2 Активними називають сили, величина від дії інших сил.
в) – “і напрям дії яких не залежить”;
3.1.3 Дія активних сил зумовлює і пасивні сили.
а) – “пришвидшення”;
3.1.4 Пасивними називають сили, величина від дії інших сил.
г) – “і часто напрям яких залежить”;
3.1.5 Зовнішніми називають сили взаємодії між точками
б) – “різних механічних систем”;
3.1.6 Внутрішніми називають сили взаємодії між точками.
а) – “однієї і тієї ж механічної системи”;
3.1.7 Вкажіть правильні формули властивостей головного вектора і головного моменту всіх внутрішніх сил механічної системи.
|
а) |
|
3.2.1 Вкажіть правильну формулу, за якою визначають радіус-вектор центра мас механічної системи.
б)
 ;
;
3.2.2 Вкажіть правильні формули, що визначають координати центра мас механічної системи.
г)
 ;
;
3.2.3 Вкажіть правильну формулу, за якою визначають радіус-вектор центра мас механічної системи, маса в якій розподілена неперервно (наприклад, тверде тіло).
в)
![]() ;
;
3.2.4 Вкажіть правильні формули, що визначають координати центра мас механічної системи, маса в якій розподілена неперервно (наприклад, тверде тіло).
б)
![]() ;
;
3.2.5 Положення центра мас механічної системи ______ положення окремих її точок.
а) – “залежить від”;
3.2.6 Величинами, які повністю характеризують розподіл мас в механічній системі є:
а) – “центр мас механічної системи”;
3.3.1 Моментом інерції механічної системи відносно деякого геометричного елемента (точки, осі, площини) називають суму їх відстані до даного елемента.
б) – “добутків мас точок системи на квадрат”;
3.3.2 Вкажіть правильну формулу моменту інерції механічної системи відносно деякого геометричного елемента (точки, осі, площини).
д)
![]() .
.
3.3.3 Вкажіть правильну формулу моменту інерції меха-нічної системи відносно деякого геометричного елемента (точки, осі, площини), якщо маса системи розподілена неперервно (наприклад, тверде тіло).
г)
![]() ;
;
3.3.4 Моментом інерції механічної системи відносно полюса (полярним моментом інерції) називають суму _____ відстані до даного полюса (точки).
а) – “добутків мас всіх точок системи на квадрат їх”;
3.3.5 Вкажіть правильну формулу моменту інерції механічної системи відносно полюса (точки).
|
а)
|
|
3.3.6 Вкажіть правильну формулу моменту інерції механічної системи відносно полюса (точки).
|
|
|
|
| |
|
в)
|
|
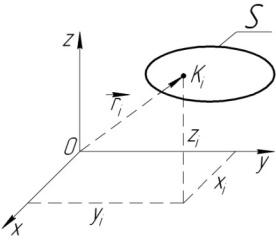
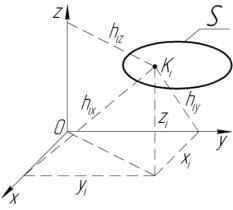
3.3.7 Моментом інерції механічної системи відносно осі (осьовим моментом інерції) називають суму _________ їх відстані до даної осі.
г) – “добутків мас всіх точок системи на квадрат;
33.8 Вкажіть правильні формули моментів інерції механічної системи відносно координатних осей (осьових моментів інерції).
|
Б) |
|
3.3.9 Вкажіть правильні формули моментів інерції механічної системи відносно координатних осей (осьових моментів інерції).
|
а) |
|
|
|
| ||


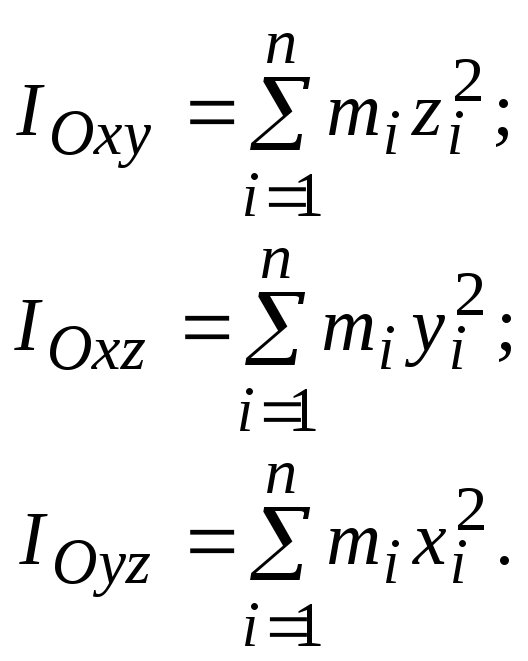
3.3.10 Моментом інерції механічної системи відносно площини (планарним моментом інерції) називають суму їх відстані до даної площини.
а) – “добутків мас всіх точок системи на квадрат”;
3.3.11 Вкажіть правильні формули моментів інерції механічної системи відносно координатних площин (планарних моментів інерції).
|
д) |
|
|

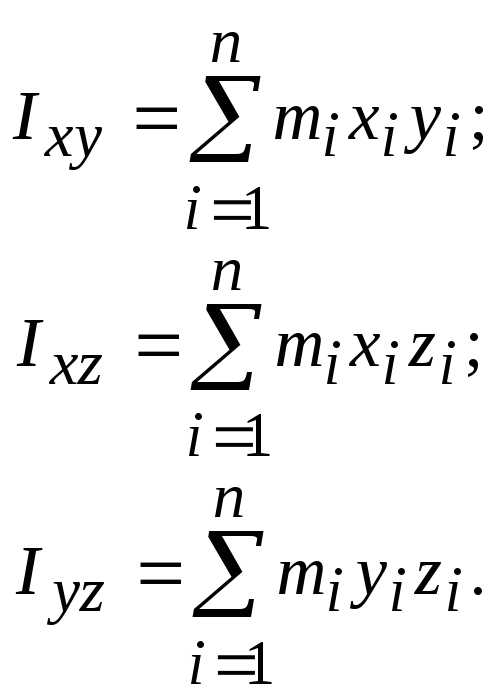
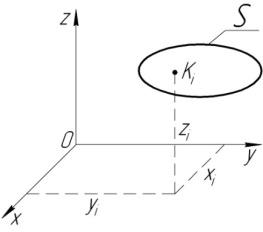
3.3.12 Відцентровим моментом інерції механічної системи називається величина, яка дорівнює сумі її координати.
б) – “добутків мас кожної точки системи на дві”;
3.3.13 Вкажіть правильні формули відцентрових моментів інерцій механічної системи.
|
б) |
|
|
| |

3.3.14 Вкажіть правильні формули відцентрових моментів інерцій механічної системи у випадку неперервного розподілу мас в механічній системі (наприклад, тверде тіло).
|
а) |
|
|
|
| ||
3.3.15 Вкажіть правильні формули моментів інерцій механічної системи відносно координатних площин (планарних моментів інерцій) у випадку неперервного розподілу мас в механічній системі (наприклад, тверде тіло).
|
б) |
|
|
| |


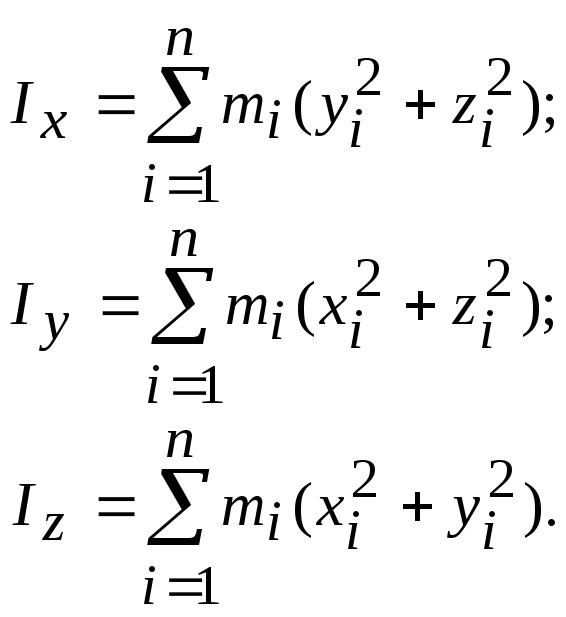
3.3.16 Вкажіть правильні формули моментів інерцій механічної системи відносно координатних осей (осьових моментів інерцій) у випадку неперервного розподілу мас в механічній системі (наприклад, тверде тіло).
|
в) |
|
|
|
| ||
3.3.17 Вкажіть правильні формули моментів інерцій механічної системи відносно координатних осей (осьових моментів інерцій) у випадку неперервного розподілу мас в механічній системі (наприклад, тверде тіло).
|
б) |
|
|
| |
3.3.18 Вкажіть правильну формулу моменту інерції механічної системи відносно полюса (точки) у випадку неперервного розподілу мас в механічній системі (наприклад, тверде тіло).
|
б) |
|
| |
|
|
| ||
|
| |||

3.3.19 Вкажіть правильну формулу моменту інерцій механічної системи відносно полюса (точки) у випадку неперервного розподілу мас в механічній системі (наприклад, тверде тіло).
|
д) |
|
|
| |
3.3.20 Сума осьових моментів інерції механічної системи дорівнює моменту інерції.
б) – “подвоєному її полярному”;
3.3.21 Вкажіть правильний вираз суми осьових моментів інерції механічної системи.
в)
![]() ;
;
3.3.22 Сума планарних моментів інерції механічної системи дорівнює моменту інерції.
а) – “її полярному”;
3.3.23 Вкажіть правильний вираз суми планарних моментів інерції механічної системи.
б)
![]() ;
;
3.3.24 Вкажіть правильні залежності між осьовими і планарними моментами інерції.
|
а) |
|
|
|
| ||
3.3.25
Вкажіть правильну формулу осьового
моменту інер-ції механічної системи
відносно осі Z,
якщо відома маса системи М
і радіус інерції
![]() .
.
в)
![]() ;
;
3.3.26
Радіус інерції
![]() відносно
осіZ
визначає________ від осі Z
до
точки в якій потрібно зосередити всю
масу системи М,
щоб момент інерції отриманої точки
відносно даної осі дорівнював моменту
інерції системи.
відносно
осіZ
визначає________ від осі Z
до
точки в якій потрібно зосередити всю
масу системи М,
щоб момент інерції отриманої точки
відносно даної осі дорівнював моменту
інерції системи.
а) – “найкоротшу відстань”;
3.3.27 Вкажіть правильну одиницю виміру моментів інерції механічної системи.
в) – кг·м2;
3.3.28 Вкажіть правильний вираз моменту інерції механіч-ної системи І відносно деякого геометричного елемента, якщо відомі моменти інерції складових частин системи відносно даного елемента Іі.
б)
![]() ;
;
3.3.29 Момент інерції механічної системи відносно деякої осі дорівнює сумі моменту інерції цієї системи відносно осі, що проходить через центр мас системи паралельно заданій осі, і між цими осями.
б) – “добутку маси системи на квадрат відстані”;
3.3.30 Момент інерції механічної системи відносно деякої осі дорівнює сумі моменту інерції цієї системи відносно осі, що , і добутку маси системи на квадрат відстані між цими осями.
а) – “проходить через центр мас системи паралельно заданій осі”;
3.3.31 Вкажіть правильний вираз теореми про моменти інерції відносно паралельних осей (теорема Гюйгенса).
|
|
| ||
|
| |||
|
в) |
|
| |
|
|
| ||
|
| |||
3.3.32 Вкажіть правильний вираз теореми про моменти інерції відносно паралельних осей (теорема Гюйгенса).
|
|
| ||||
|
|
в) |
; | |||
|
|
|
|
| ||
|
|
| ||||
|
| |||||
3.3.33 Вкажіть правильний вираз теореми про моменти інерції відносно паралельних осей (теорема Гюйгенса).
|
а) |
|
| |
|
|
| ||
|
| |||
|
| |||
|
| |||
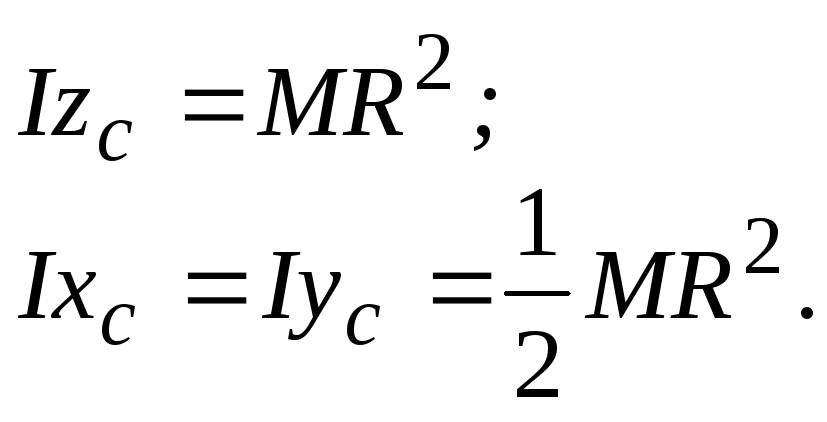
3.4.1 Вкажіть правильні вирази моментів інерції тонкого кільця (кругле тіло, маса якого розподілена по його ободу).
|
|
| ||
|
б) |
|
| |

3.4.2 Вкажіть правильні вирази моментів інерції однорідної круглої пластини (диска).
|
а) |
|
| |
|
|
| ||
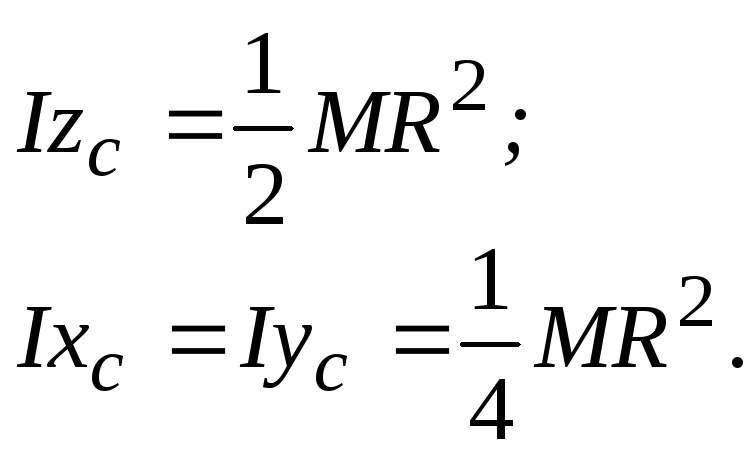

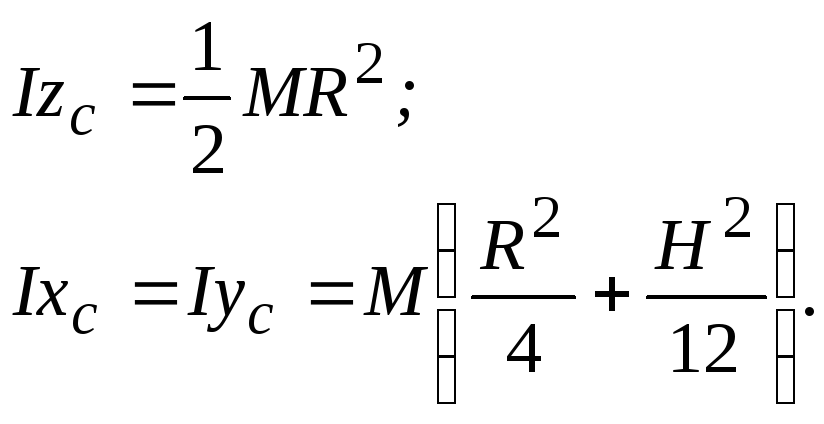
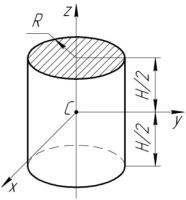
3.4.3 Вкажіть правильні вирази моментів інерцій круглого суцільного циліндра.
|
| |
|
д) |
|
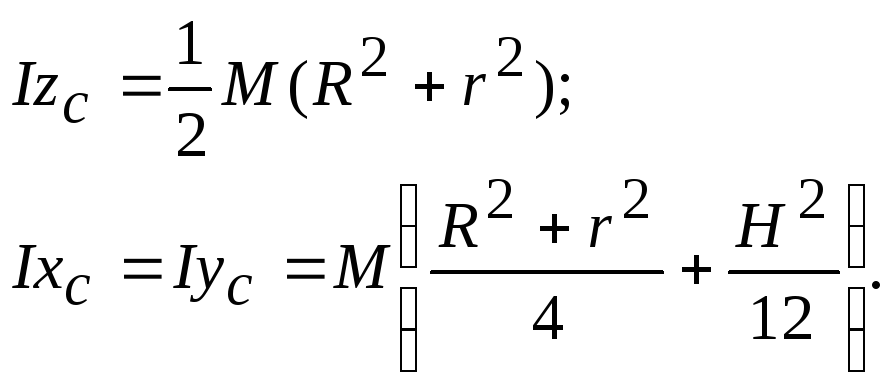
3.4.4 Вкажіть правильні вирази моментів інерції пустотілого однорідного циліндра (труби).
|
|
| ||
|
| |||
|
| |||
|
г) |
|
| |
|
|
| ||

3.4.5 Вкажіть правильний вираз моменту інерції однорід-ного тонкого стрижня.
г)
![]() ;
;
3.4.6 Вкажіть правильні вирази моментів інерції суцільної кулі.
в)
![]() ;
;
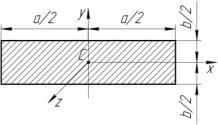
3.4.7 Вкажіть правильні вирази моментів інерції прямокутної пластини.
|
а) |
| |
|
|
| |
|
| ||
|
| ||

3
а)
![]()
![]() ;
;
4.1.1.1 Імпульс сили – це фізична величина, яка характеризує ____________ за деякий проміжок часу.
а) – “дію сили на матеріальний об’єкт”;
4.1.1.2 Вкажіть правильну формулу вектора імпульсу змінної сили.
б)
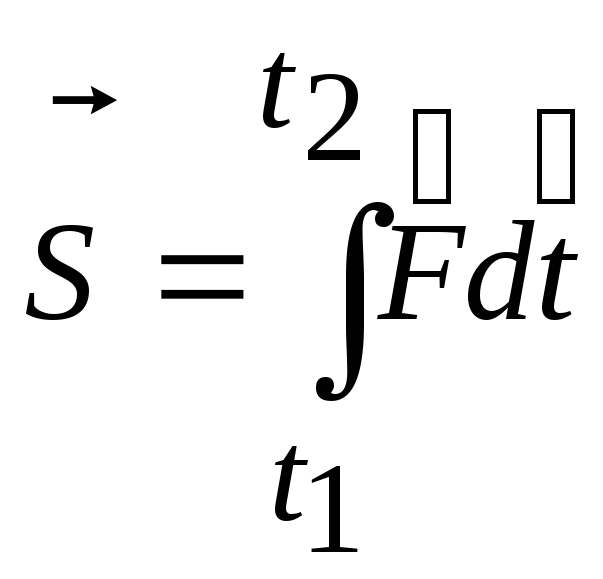 ;
;
;
;
4.1.1.3 Вкажіть правильну формулу вектора імпульсу сталої сили.
в)
![]() ;
;
4.1.1.4 Імпульс рівнодійної системи сил за деякий проміжок часу дорівнює імпульсів складових сил системи за цей же проміжок часу.
б) – “геометричній сумі”;
4.1.1.5 Імпульс сили – це величина.
а) – “векторна”;
4.1.1.6 Вектор елементарного імпульсу сили за напрямом ___________ з вектором сили.
в) – “збігається”;
4.1.1.7 Вкажіть правильну одиницю вимірювання імпульсу сили.
в) – „Н·с";
4.1.1.8 Вкажіть правильні формули проекції імпульсу змінної сили на декартові осі координат.
в)
 .4.1.1.9
Вкажіть правильні формули проекції
імпульсу змінної сили на декартові осі
координат.
.4.1.1.9
Вкажіть правильні формули проекції
імпульсу змінної сили на декартові осі
координат.
д)
 .4.1.1.10
Вкажіть правильні вирази напрямних
конусів вектора імпульсу сили
.4.1.1.10
Вкажіть правильні вирази напрямних
конусів вектора імпульсу сили![]() .
.
а)
![]()
4.1.1.11
Вкажіть правильний вираз імпульсу сили,
якщо його проекції на декортові осі
координат
![]() i
i
![]() .
.
в)
![]() ;
;
4.1.2.1 Кількістю руху матеріальної точки називають векторну величину, яка дорівнює .
а) – “добутку маси точки на її швидкість”;
4.1.2.2 Кількість руху матеріальної точки ____________величина.
б) – “векторна”;
4.1.2.3 Вкажіть правильну одиницю вимірювання кількості руху.
г) – „кг·м/с”;
4.1.2.4 Вкажіть правильну формулу кількості руху матеріальної точки.
б)![]() ;
;
4.1.2.5 Кількість руху матеріальної точки є вектор, який за напрямком швидкості точки.
б) – “збігається з вектором”;
4.1.2.6 Вкажіть правильний рисунок напрямку вектора кількості руху матеріальної точки.
|
|
в) |
|
|
|
|
|
|
|
|
|
|
|
4.1.2.7 Вкажіть правильні вирази проекції вектора кількості руху на декартові осі координат.
а)
![]() ;4.1.2.8
Вкажіть правильні вирази проекції
вектора кількості руху на декартові
осі координат.
;4.1.2.8
Вкажіть правильні вирази проекції
вектора кількості руху на декартові
осі координат.
в)
![]() ;4.1.2.9
Кількістю руху механічної системи
називають _______________ кількостей руху всіх
матеріальних точок даної системи.
;4.1.2.9
Кількістю руху механічної системи
називають _______________ кількостей руху всіх
матеріальних точок даної системи.
б) – “векторну суму (головний вектор)”;
4.1.2.10 Вкажіть правильний вираз кількості руху механічної системи (головного вектора кількості руху).
в)
![]() ;
;
4.1.2.11 Вкажіть правильний вираз кількості руху механічної системи (головного вектора кількості руху).
в)
![]() ;
;
4.1.2.12 Кількість руху механічної системи дорівнює ________ її центра мас.
б) – “добутку маси системи на швидкість”;
4.1.2.13 Вкажіть правильні вирази проекції вектора кількості руху механічної системи на декартові осі координат.
в)
![]() ;4.1.2.14
Вкажіть правильні вирази проекції
вектора кількості руху механічної
системи на декартові осі координат.
;4.1.2.14
Вкажіть правильні вирази проекції
вектора кількості руху механічної
системи на декартові осі координат.
а)
![]() ;4.1.2.15
Кількість руху є мірою
руху.
;4.1.2.15
Кількість руху є мірою
руху.
г) – “механічного”;
4.1.3.1 Перша похідна за часом від кількості руху матері-альної точки дорівнює сумі всіх сил, що діють на точку.
в) – “геометричній”;
4.1.3.2 Перша похідна за часом від кількості руху матеріальної точки дорівнює геометричній сумі ________сил, що діють на точку.
а) – “всіх”;
4.1.3.3 Вкажіть правильний вираз теореми про зміну кількості руху матеріальної точки в диференціальній формі.
д)
![]() .
.
4.1.3.4 Диференціал від кількості руху матеріальної точки дорівнює сумі елементарних імпульсів всіх сил, що діють на точку.
а) – “геометричній”;
4.1.3.5 Диференціал від кількості руху матеріальної точки дорівнює геометричній сумі елементарних імпульсів ________ сил, що діють на точку.
б) – “всіх”;
4.1.3.6 Вкажіть правильний вираз теореми про зміну кількості руху матеріальної точки в диференціальній формі.
г)
![]() ;
;
4.1.3.7 Зміна кількості руху матеріальної точки за деякий проміжок часу дорівнює сумі імпульсів всіх сил, що діють на точку, за цей же проміжок часу.
в) – “геометричній”;
4.1.3.8 Зміна кількості руху матеріальної точки за деякий проміжок часу дорівнює геометричній сумі імпульсів ________ сил, що діють на точку, за цей же проміжок часу.
б) – “всіх”;
4.1.3.9 Вкажіть правильний вираз теореми про зміну кількості руху матеріальної точки в інтегральній (кінцевій) формі за деякий проміжок часу.
д)
![]() .
.
4.1.3.10 Вкажіть правильні диференціальні вирази теореми про зміну кількості руху матеріальної точки в проекціях на декартові осі координат.
а)
![]() ;
4.1.3.11 Вкажіть правильні диференціальні
вирази теореми про зміну кількості руху
матеріальної точки в проекціях на
декартові осі координат.
;
4.1.3.11 Вкажіть правильні диференціальні
вирази теореми про зміну кількості руху
матеріальної точки в проекціях на
декартові осі координат.
в)
![]() ;4.1.3.12
Вкажіть правильні диференціальні вирази
теореми про зміну кількості руху
матеріальної точки в проекціях на
декартові осі координат.
;4.1.3.12
Вкажіть правильні диференціальні вирази
теореми про зміну кількості руху
матеріальної точки в проекціях на
декартові осі координат.
г)
![]() ;4.1.3.13
Вкажіть правильні інтегральні (в кінцевій
формі) вирази теореми про зміну кількості
руху матеріальної точки в проекціях на
декартові осі координат.
;4.1.3.13
Вкажіть правильні інтегральні (в кінцевій
формі) вирази теореми про зміну кількості
руху матеріальної точки в проекціях на
декартові осі координат.
Д)![]() .
.
4.1.3.14 Вкажіть правильні інтегральні (в кінцевій формі) вирази теореми про зміну кількості руху матеріальної точки в проекціях на декартові осі координат.
б)
![]() ;
;
4.1.3.15 Вкажіть правильні диференціальні вирази теореми про зміну кількості руху матеріальної точки в проекціях на декартові осі координат.
б)
![]() ;
;
4.1.3.16 Перша похідна за часом від кількості руху механічної системи дорівнює сумі (головному вектору) всіх зовнішніх сил, що діють на систему.
б) – “геометричній”;
4.1.3.17 Перша похідна за часом від кількості руху механічної системи дорівнює геометричній сумі (головному вектору) всіх ________ сил, що діють на систему.
в) – “зовнішніх”;
4.1.3.18 Вкажіть правильний вираз теореми про зміну кількості руху механічної системи в диференціальній формі.
б)![]() ;
;
4.1.3.19 Вкажіть правильний вираз теореми про зміну кількості руху механічної системи в диференціальній формі.
в)
![]() ;
;
4.1.3.20 Диференціал від кількості руху механічної системи дорівнює сумі елементарних імпульсів всіх зовнішніх сил, що діють на систему.
б) – “геометричній”;\
4.1.3.21 Диференціал від кількості руху механічної системи дорівнює геометричній сумі елементарних __________ сил, що діють на систему.
в) – “імпульсів всіх зовнішніх”;
4.1.3.22 Зміна кількості руху механічної системи за деякий проміжок часу дорівнює сумі імпульсів всіх зовнішніх сил, що діють на систему, за цей же проміжок часу.
а) – “геометричній”;
4.1.3.23 Зміна кількості руху механічної системи за деякий проміжок часу дорівнює геометричній сумі _________ сил, що діють на систему, за цей же проміжок часу.
в) – “імпульсів всіх зовнішніх”;
4.1.3.24 Вкажіть правильний вираз теореми про зміну кількості руху механічної системи в інтегральній формі.
в)
![]() ;
;
4.1.3.25 Вкажіть правильні диференціальні вирази теореми про зміну кількості руху механічної системи в проекціях на декартові осі координат.
В)
4.1.3.26 Вкажіть правильні диференціальні вирази теореми про зміну кількості руху механічної системи в проекціях на декартові осі координат.
а)
![]() ;4.1.3.27
Вкажіть правильні диференціальні вирази
теореми про зміну кількості руху
механічної системи в проекціях на
декартові осі координат.
;4.1.3.27
Вкажіть правильні диференціальні вирази
теореми про зміну кількості руху
механічної системи в проекціях на
декартові осі координат.
а)
![]() ;4.1.3.28
Вкажіть правильні інтегральні (в кінцевій
формі) вирази теореми про зміну кількості
руху механічної системи в проекціях на
декартові осі координат.
;4.1.3.28
Вкажіть правильні інтегральні (в кінцевій
формі) вирази теореми про зміну кількості
руху механічної системи в проекціях на
декартові осі координат.
б)
![]() 4.1.3.29
Зміна кількості руху механічної системи
зумовлена
силами, що діють на систему.
4.1.3.29
Зміна кількості руху механічної системи
зумовлена
силами, що діють на систему.
б) – “тільки зовнішніми”;
4.1.3.30
Якщо головний вектор зовнішніх сил, що
діють на систему, дорівнює нулеві
![]() ,
то кількість руху механічної системи
_____________.
,
то кількість руху механічної системи
_____________.
б) – “не зміниться”;
4.1.3.31 Якщо головний вектор зовнішніх сил, що діють на систему _____________, то кількість руху механічної системи не зміниться.
а) – “дорівнює нулеві”;
4.1.3.32 Вкажіть правильні вирази закону збереження кількості руху механічної системи.
б)
Якщо
![]() ,
то
,
то![]() ;
;
4.1.3.33 Якщо проекція головного вектора зовнішніх сил, що діють на систему, на деяку вісь , то проекція кількості руху системи на дану вісь не зміниться.
б) – “дорівнює нулеві”;
4.1.3.34 Якщо проекція головного вектора зовнішніх сил, що діють на систему, на деяку вісь дорівнює нулеві, то проекція кількості руху системи на дану вісь ___________.
в) – “не зміниться”;
4.1.3.35 Вкажіть правильні вирази закону збереження кількості руху механічної системи по осі абсцис.
а)
Якщо
![]() ,
то
,
то![]() ;
;
4.1.4.1 Сума векторів секундних кількостей руху рідини, що протікає через два поперечні перерізи труби, які нап-равлені у середину виділеного об’єму, а також головних векторів сил, дорівнює нулеві.
в) – “об’ємних і поверхневих”;
4.1.4.2 Вкажіть правильний запис формули Ейлера для дослідження руху суцільного середовища.
д)
![]() .
.
4.1.4.3 Вкажіть правильні записи формули Ейлера для дослідження руху суцільного середовища в проекціях на декартові осі координат.
д)

4.1.4.4 Вкажіть правильні записи формули Ейлера для дослідження руху суцільного середовища в проекціях на декартові осі координат.
|
|
|
|
б) |
|
|
|
|
|
|
|
|
|
|
4.2.1 Центр мас механічної системи рухається як матеріальна точка, в якій зосереджена вся маса системи і до якої прикладені всі __ сили, що діють на систему.
б) – “зовнішні”;
4.2.2 Центр мас механічної системи ____________, в якій зосереджена вся маса системи і до якої прикладені всі зовнішні сили, що діють на систему.
б) – “рухається як матеріальна точка”;
4.2.3 Вкажіть правильну формулу теореми про рух центра мас механічної системи.
д)
![]() .
.
4.2.4 Вкажіть правильну формулу теореми про рух центра мас механічної системи.
д)
![]() .
.
4.2.5 Вкажіть правильну формулу теореми про рух центра мас механічної системи.
б)
![]() ;
;
4.2.6 Вкажіть правильну формулу теореми про рух центра мас механічної системи (маса системи не змінюється з часом).
а)
![]() ;
;
4.2.7 Вкажіть правильні формули теореми про рух центра мас механічної системи в проекціях на декартові осі координат.
в)
![]() ;
;
4.2.8 Вкажіть правильні формули теореми про рух центра мас механічної системи в проекціях на декартові осі координат.
б)
![]() ;4.2.9
На рух центра мас механічної системи
впливають тільки _____________ сили, що діють
на систему.
;4.2.9
На рух центра мас механічної системи
впливають тільки _____________ сили, що діють
на систему.
б) – “зовнішні”;
4.2.10
Якщо головний вектор
 зовнішніх сил, що діють на систему, ,
то центр мас її залежно від початкових
умов рухається рівномірно і прямолінійно
або не змінює свого положення.
зовнішніх сил, що діють на систему, ,
то центр мас її залежно від початкових
умов рухається рівномірно і прямолінійно
або не змінює свого положення.
б) – “дорівнює нулеві”;
4.2.11
Якщо головний вектор
 зовнішніх сил, що діють на систему,
дорівнює нулеві, то центр мас її рухається
рівномірно і прямолінійно або не змінює
свого положення.
зовнішніх сил, що діють на систему,
дорівнює нулеві, то центр мас її рухається
рівномірно і прямолінійно або не змінює
свого положення.
в) – “залежно від початкових умов”;
4.2.12
Якщо головний вектор
 зовнішніх сил, що діють на систему,
дорівнює нулеві, то центр мас її залежно
від початкових умов рухається
___________або не змінює свого положення.
зовнішніх сил, що діють на систему,
дорівнює нулеві, то центр мас її залежно
від початкових умов рухається
___________або не змінює свого положення.
б) – “рівномірно і прямолінійно”;
4.2.13 Вкажіть правильний вираз збереження руху центра мас системи.
а)
Якщо
![]() ,
то
,
то![]() ;
при цьому:
;
при цьому:
1)
якщо
![]() ,
то
,
то![]() ,
тобто, центр мас руха-
ється рівномірно
і прямолінійно;
,
тобто, центр мас руха-
ється рівномірно
і прямолінійно;
2)
якщо
![]() ,
то
,
то![]() ,
тобто, центр мас системи не змінює свого
положення.
,
тобто, центр мас системи не змінює свого
положення.
4.2.14 Якщо проекція головного вектора зовнішніх сил, що діють на систему, на деяку вісь то проекція швидкості центра мас на цю вісь не змінюється, тобто є інтегралом руху.
а) – “дорівнює нулеві”;
4.2.15 Вкажіть правильний вираз в проекції на вісь Ох закону збереження руху центра мас системи.
в)
Якщо
![]() ,
то
,
то![]() ;
при цьому:
;
при цьому:
1)
якщо
![]() ,
то
,
то![]() ,
тобто, центр мас по осіОх
рухається рівномірно;
,
тобто, центр мас по осіОх
рухається рівномірно;
2)
якщо
![]() ,
то
,
то![]() ,
тобто, центр мас системи по осіОх
не змінює свого положення.
,
тобто, центр мас системи по осіОх
не змінює свого положення.
4.2.16 Вкажіть правильний вираз в проекції на вісь Оу закону збереження руху центра мас системи.
.
б) Якщо
![]() ,
то
,
то![]() ;
при цьому:
;
при цьому:
1)
якщо
![]() ,
то
,
то![]() ,
тобто, центр мас по осіОу
рухається рівномірно.
,
тобто, центр мас по осіОу
рухається рівномірно.
2)
якщо
![]() ,
то
,
то![]() ,
тобто, центр мас системи по осіОу
не змінює свого положення.
,
тобто, центр мас системи по осіОу
не змінює свого положення.
4.3.1.1 Момент кількості руху (кінетичний момент) є мірою _______ механічного руху.
б) – “обертального”;
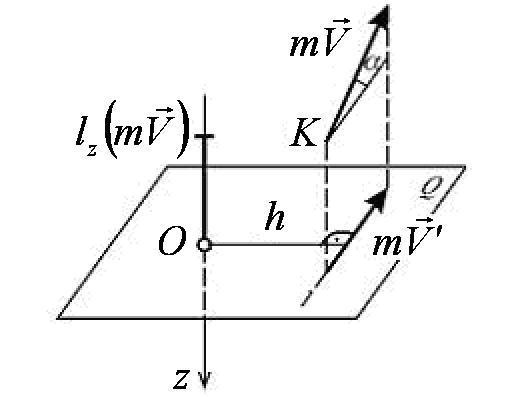
4.3.1.2
Моментом кількості руху
![]() матеріальної точки відносно центраО
матеріальної точки відносно центраО
![]() називають ___
на
її кількість руху.
називають ___
на
її кількість руху.
а) – “векторний добуток радіуса – вектора точки”;
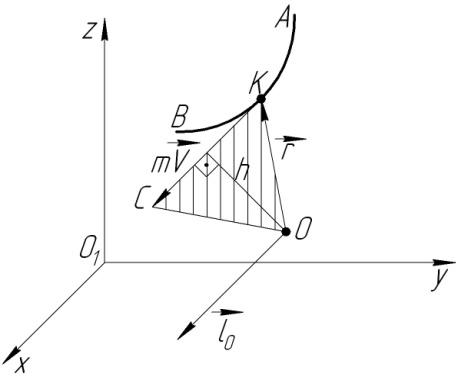
4.3.1.3
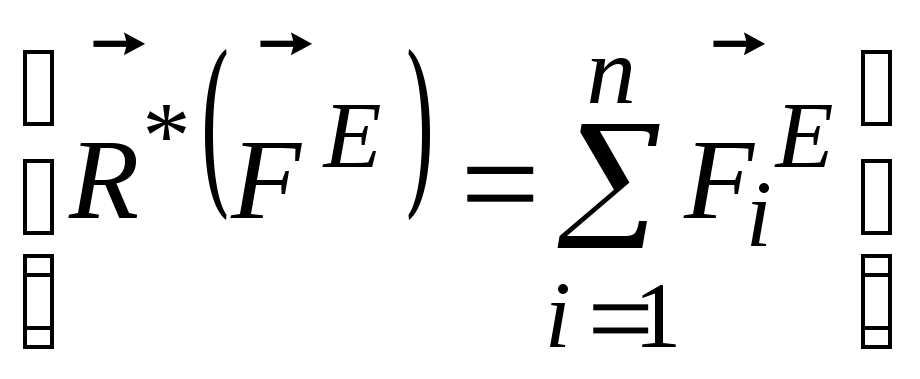
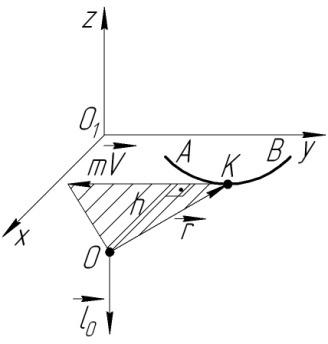
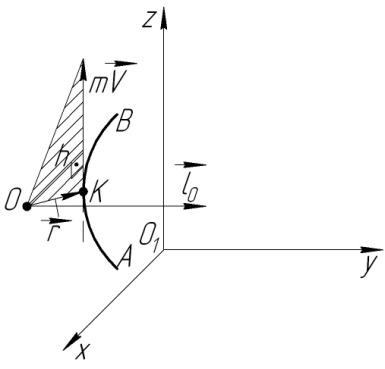
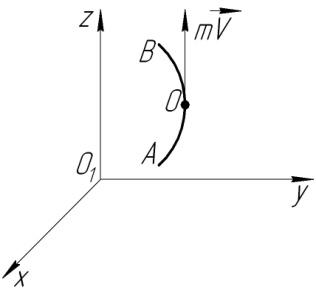
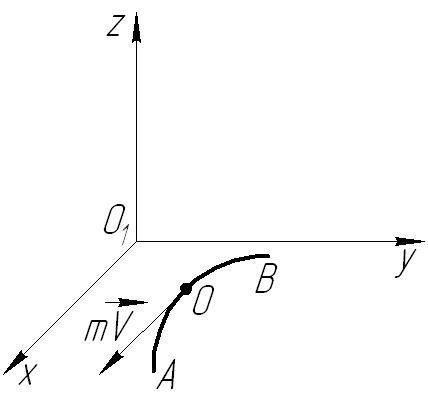
Вкажіть правильний рисунок і правильні
формули, які відповідають моменту
кількості руху
![]() матеріальної
точкиК
відносно центра О
матеріальної
точкиК
відносно центра О
![]() .
.
а)
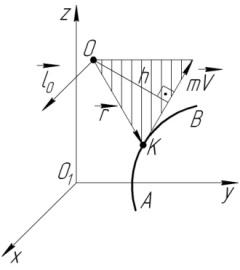
4.3.1.4
Вкажіть правильний рисунок і правильні
формули, які відповідають моменту
кількості руху
![]() матеріальної точки відносно центраО
матеріальної точки відносно центраО
![]() .
.
|
|
|
б) |
|
|
|
| ||
|
|
|
|
|
|
|
| ||
|
|
|
| |
4.3.1.5
Момент кількості руху точки
![]() відносно центра дорівнює нулеві у
випадку:
відносно центра дорівнює нулеві у
випадку:
а)
h
= 0, лінія вздовж якої спрямований вектор
кількості руху точки
![]() проходить через центр;
проходить через центр;
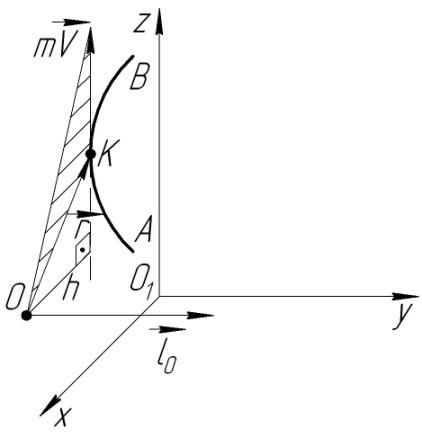
4.3.1.6
Вкажіть правильний рисунок і правильні
формули, які відповідають моменту
кількості руху
![]() матеріальної точки відносно центраО
матеріальної точки відносно центраО
![]() .
.
|
|
|
б) |
|
|
|
| ||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4.3.1.7
Вкажіть правильний рисунок і правильні
формули, які відповідають моменту
кількості руху
![]() матеріальної точки відносно центраО
матеріальної точки відносно центраО
![]() .
.
|
|
|
|
|
|
|
| ||
|
|
|
|
|
|
|
| ||
|
д) |
|
| |

4.3.1.8
Вкажіть правильний рисунок і правильні
формули, які відповідають моменту
кількості руху
![]() матеріальної точки відносно центраО
матеріальної точки відносно центраО
![]() .
.
|
|
|
|
|
|
|
| ||
|
в) |
|
|
|
|
|
| ||
|
|
|
| |
4.3.1.9
Вкажіть правильний рисунок і правильні
формули, які відповідають моменту
кількості руху
![]() матеріальної точки відносно центраО
матеріальної точки відносно центраО
![]() .
.
|
а) |
|
|
|
|
|
| ||
|
|
|
|
|
|
|
| ||
|
|
|
|
|
4.3.1.10
Вкажіть правильний рисунок і правильні
формули, які відповідають моменту
кількості руху
![]() матеріальної точки відносно центраО
матеріальної точки відносно центраО
![]() .
.
|
|
|
|
|
|
|
| ||
|
|
|
|
|
|
|
| ||
|
д) |
|
|
|
4.3.1.11
Вкажіть правильний рисунок і правильні
формули, які відповідають моменту
кількості руху
![]() матеріальної точки відносно центраО
матеріальної точки відносно центраО
![]() .
.
|
а) |
|
|
|
|
|
| ||
|
|
|
|
|
|
|
| ||
|
|
|
| |

4.3.1.12
Вкажіть правильний рисунок і правильні
формули, які відповідають моменту
кількості руху
![]() матеріальної точки відносно центраО
матеріальної точки відносно центраО
![]() .
.
|
|
|
б) |
|
|
|
|
| |
|
|
|
|
|
|
|
| ||
|
|
|
| |
4.3.1.13
Вкажіть правильний рисунок і правильні
формули, які відповідають моменту
кількості руху
![]() матеріальної точки відносно центраО
матеріальної точки відносно центраО
![]() .
.
|
|
|
|
|
|
|
| ||
|
в) |
|
|
|
|
|
| ||
|
|
|
| |
4.3.1.14
Вкажіть правильний рисунок і правильні
формули, які відповідають моменту
кількості руху
![]() матеріальної точки відносно центраО
матеріальної точки відносно центраО
![]() .
.
|
|
|
|
|
|
|
| ||
|
|
|
г) |
|
|
|
| ||
|
|
|
| |
|
| |||
4.3.1.15
Вкажіть правильний рисунок і правильні
формули, які відповідають моменту
кількості руху
![]() матеріальної точки відносно центраО
матеріальної точки відносно центраО
![]() .
.
|
|
|
б) |
|
|
|
| ||
|
|
|
|
|
|
|
| ||
|
|
|
| |

4.3.1.16
Вкажіть правильний рисунок і правильні
формули, які відповідають моменту
кількості руху
![]() матеріальної точки відносно центраО
матеріальної точки відносно центраО
![]() .
.
|
|
|
|
|
|
|
| ||
|
|
|
|
|
|
|
| ||
|
д) |
|
| |

4.3.1.17
Вкажіть правильний рисунок і правильні
формули, які відповідають моменту
кількості руху
![]() матеріальної точки відносно центраО
матеріальної точки відносно центраО
![]() .
.
|
а) |
|
|
|
|
|
| ||
|
|
|
|
|
|
|
| ||
|
|
|
| |
4.3.1.18
Вкажіть правильний рисунок і правильні
формули, які відповідають моменту
кількості руху
![]() матеріальної точки відносно центраО
матеріальної точки відносно центраО
![]() .
.
|
|
|
|
|
|
|
| ||
|
в) |
|
|
|
|
|
| ||
|
|
|
| |
4.3.1.19 Алгебраїчний момент кількості руху матеріальної точки дорівнює добутку, взятому з відповідним знаком модуля вектора кількості руху на _____________.
б) – “плече цього вектора”;
4.3.1.20 Вкажіть правильний вираз алгебраїчного моменту кількості руху матеріальної точки відносно центра О, який відповідає нижченаведеному рисунку.
|
а)
|
|
|
| |
|
| |
|
| |
|
|

4.3.1.21 Вкажіть правильний векторний вираз моменту кількості руху матеріальної точки відносно центра О, який відповідає нижченаведеному рисунку.
|
|
|
|
б)
| |
|
| |
|
| |
|
|
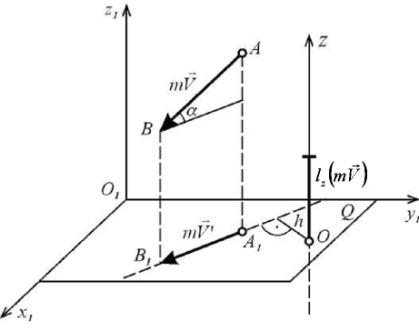
4.3.2 Момент кількості руху матеріальної точки відносно осі
4.3.2.1
Вкажіть правильний рисунок і правильну
формулу, які відповідають моменту
кількості руху
![]() матеріальної точки відносно осіOz.
матеріальної точки відносно осіOz.
|
|
|
|
|
|
|
| ||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
д) |
|
| |
|
|
|
| |
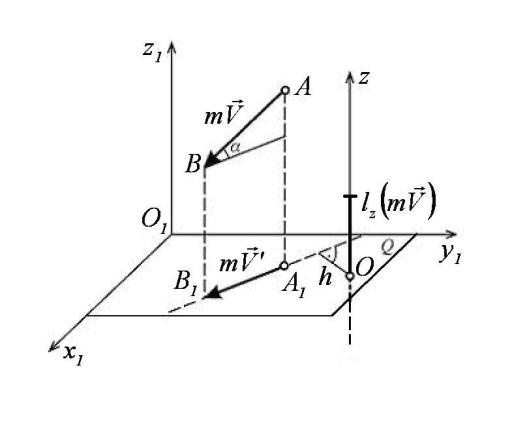
4.3.2.2
Вкажіть правильний рисунок і правильну
формулу, які відповідають моменту
кількості руху
![]() матеріальної точки відносно осіOу
або
Оz.
матеріальної точки відносно осіOу
або
Оz.
|
|
|
|
|
|
|---|---|---|---|---|
|
|
|
|
|
|
|
|
|
г) |
| |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
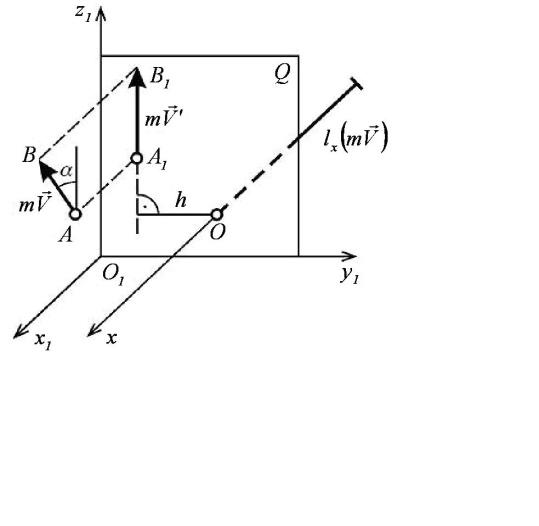
4.3.2.3
Вкажіть правильний рисунок і правильну
формулу, які відповідають моменту
кількості руху
![]() матеріальної точки відносно осіOх,
Oy
або
Oz.
матеріальної точки відносно осіOх,
Oy
або
Oz.
|
|
|
|
| |
|
|
| |||
|
в) |
|
|
| |
|
|
| |||
|
|
|
| ||

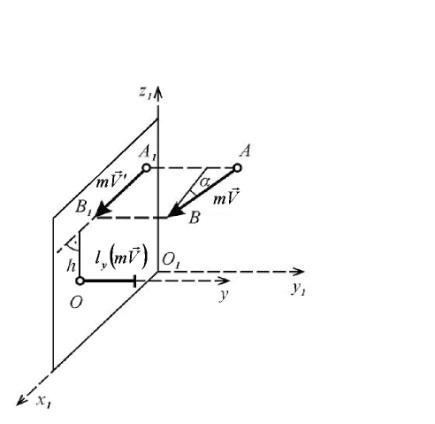
4.3.2.4
Вкажіть правильний рисунок і правильну
формулу, які відповідають моменту
кількості руху
![]() матеріальної точки відносно осіOх,
Oy
або
Oz.
матеріальної точки відносно осіOх,
Oy
або
Oz.
|
|
|
|
|
|
|
| ||
|
в) |
|
|
|
|
|
|
| |
|
|
|
| |
|
|
|
| |
4.3.2.5
Вкажіть правильний рисунок і правильну
формулу, які відповідають моменту
кількості руху
![]() матеріальної точки відносно осіOх,
Oy
або
Oz.
матеріальної точки відносно осіOх,
Oy
або
Oz.
|
|
|
б) |
|
|
|
| ||
|
|
|
|
|
|
|
|
| |
|
|
|
|
|
|
|
|
| |
4.3.2.6
Вкажіть правильний рисунок і правильну
формулу, які відповідають моменту
кількості руху
![]() матеріальної точки відносно осіOх,
Oy
або
Oz.
матеріальної точки відносно осіOх,
Oy
або
Oz.
|
|
|
|
|
|
|
| ||
|
|
|
г) |
|
|
|
|
| |
|
|
|
| |
|
|
|
| |

4.3.2.7
Вкажіть правильний рисунок і правильну
формулу, які відповідають моменту
кількості руху
![]() матеріальної точки відносно осіOх,
Oy
або
Oz.
матеріальної точки відносно осіOх,
Oy
або
Oz.
|
|
|
|
|
|
|
|
| |
|
|
|
г) |
|
|
|
|
|
|
|
|
|
|
|
4.3.2.8
Вкажіть правильний рисунок і правильну
формулу, які відповідають моменту
кількості руху
![]() матеріальної точки відносно осіOy
або
Oz.
матеріальної точки відносно осіOy
або
Oz.
|
|
|
б) |
|
|
|
| ||
|
|
|
|
|
|
|
| ||
|
|
|
|
|
4.3.2.9
Вкажіть правильний рисунок і правильну
формулу, які відповідають моменту
кількості руху
![]() матеріальної точки відносно осіOх,
Oy
або
Oz.
матеріальної точки відносно осіOх,
Oy
або
Oz.
|
|
|
|
|
|
|
| ||
|
|
|
|
|
|
|
|
| |
|
д) |
|
| |
|
|
|
| |
4.3.2.10 Момент кількості руху точки відносно осі дорівнює добутку, взятому з відповідним знаком, проекції вектора кількості руху точки на площину _____на найкоротшу відстань від точки перетину осі з площиною до цієї проекції.
а) – “перпендикулярну до осі”;
4.3.2.11 Момент кількості руху точки відносно осі дорівнює добутку, взятому з відповідним знаком, проекції вектора кількості руху точки на площину перпендикулярну до осі на найкоротшу відстань від точки перетину осі з площиною до _______.
г) – “цієї проекції”;
4.3.2.12 Вкажіть правильний вираз моменту кількості руху точки відносно осі Оz, який відповідає наведеному нижче рисунку.
|
|
|
|
| |
|
в)
| |
|
| |
|
|

4.3.2.13
Момент кількості руху точки відносно
осі Oz![]() дорівнює нулеві у випадках:
дорівнює нулеві у випадках:
а)
![]() ,
точка рухається паралельно осіОz;
,
точка рухається паралельно осіОz;
![]() ,
лінія, вздовж якої спрямований вектор
кількості руху точки, перетинає вісь
Оz.
,
лінія, вздовж якої спрямований вектор
кількості руху точки, перетинає вісь
Оz.
ості руху з площиною дорівнює 30.
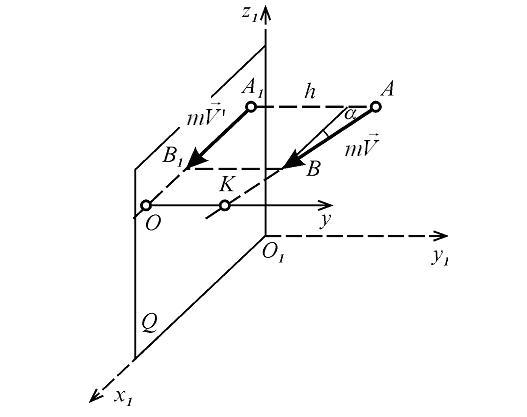
4.3.2.14
Вкажіть правильну залежність між
моментом кіль- кості руху точки відносно
центра О![]() і відносно осіOz
і відносно осіOz![]() ,
(див. наведений нижче рисунок).
,
(див. наведений нижче рисунок).
|
|
|
|
б)
| |
|
| |
|
| |
|
|
4.3.2.15 Вкажіть правильні аналітичні вирази моментів кількості руху точки відносно осей координат.
|
|
|
|
|
|
в) |
|
|
|
|
|
|
|
|
4.3.2.16 Вкажіть правильну розмірність моменту кількості руху.
а)
![]() ;
;